
Fターム[5J083AD06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 距離 (553) | 深度 (46)
Fターム[5J083AD06]に分類される特許
1 - 20 / 46
水中航走体および障害物探知装置
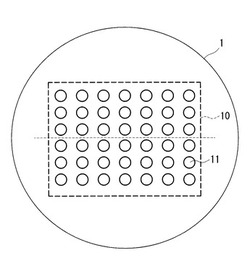
【課題】海底の様子だけでなく、海面近くの状態も探知することの可能な障害物探知装置並びに該障害物探知装置を備えることにより、比較的浅い海域を円滑に航走することのできる水中航走体を提供することを目的とする。
【解決手段】水中航走体1に、送信ビームを送出機能を備えるとともに、送出した送波ビームが対象物によって反射された反射波を受信する受信機能を有する平面アレイ10を設ける。平面アレイ10の上方に設けられた素子11によって受信された反射波に基づいて上方受信信号が作成され、平面アレイ10の下方に設けられた素子11により受信された反射波に基づいて下方受信信号が作成される。処理部は、上方受信信号から上方受波ビームを算出するとともに、下方受信信号から下方受波ビームを算出し、算出した上方受波ビーム及び下方受波ビームから海底高度を算出する。
(もっと読む)
港湾構造物計測装置

【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、音波信号を方向付けて送出するための送信装置と、海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。海底輪郭までの相互に異なるアスペクト角及び距離を有する所定の位置からの複数のN回の測深でもって音波信号が送出される。複数のサンプリング時点及びN回の測深に関して、変換器の受信信号から、位相差、位相差から生じる行路差、所属の入射角度及び入射座標が求められる。入射座標を含む所定の領域におけるデータ密度が求められる。データ密度が最大になる領域が選択され、海底輪郭を求めるために、前記領域に属する入射座標を使用する。更に本発明はこの種の方法を実施するための装置に関する。  (もっと読む)
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、船舶に取り付けられている、水中領域に音波信号を方向付けて送出するための送信装置と、船舶に取り付けられている、水中領域内の海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。送信装置によって、相互に異なる複数のN個の所定の周波数を用いて音波信号が水中領域に送出され、海底輪郭から反射された、音波信号の成分が受信装置によって受信される。N個の周波数及び複数のサンプリング時点に関して、位相差も伝播時間も求められる。所定の領域内の行路差の数からデータ密度が求められ、データ密度が最大になる領域が選択される。表面に属する行路差から海底輪郭の入射座標が求められる。更に本発明はこの種の方法を実施する装置に関する。  (もっと読む)
(もっと読む)
水中探知装置
【課題】水底が検知されない場合であってもおおよその水深値を提示可能であり、ユーザの使い勝手を向上させることができる水中探知装置の提供。
【解決手段】水中から得た情報を表示部2に表示させることができる魚群探知機1は、水中に探知信号を送出すると共に水中からの反射信号を受信する送受波器4と、反射信号に基づいて水底Pを検知すると共に水深を算出する水底検出部26と、水底検出部26によって水底Pが検知されたか否か判定する水底検知判定部32と、水底検知判定部32によって水底検出部26が水底Pを検知していないと判断された場合に、水底検出部26による水深の算出値の前回値を水深値として表示部2に表示させるための水深表示画像生成部30、描画プロセッサ44およびビデオメモリ46とを備える。
(もっと読む)
魚群探知機
【課題】デジタル方式の魚群探知機の測定精度を維持しながら、廉価にできる構成を実現する。
【解決手段】本発明の魚群探知機は、送信信号生成部、送受波器、周波数変換部、送受切替部、A/D変換部、信号処理部を備える。送受波器は、音波を水中に送信し、水中からの音波のエコーを受信する。周波数変換部は、エコーの周波数を低周波に変換して、低周波エコーを生成する。A/D変換部は、低周波エコーをデジタル信号に変換し、デジタルエコー信号を生成する。信号処理部は、デジタルエコー信号を信号処理することで、水中の状況を画面表示できる信号に変換する。周波数変換部は、第1変換手段と第2変換手段とを備える。第1変換手段は、所定の周波数での利得が大きくなるような周波数特性を持つアンプ機能と、エコーの周波数を高くするミキサー機能とを有する。第2変換手段は、第1変換手段の出力の周波数を所定の周波数よりも低くする。
(もっと読む)
GPS魚群探知装置
【課題】 従来の航法装置では、船が現地点で到達した位置までの過去の海底しか表示しないばかりでなく、不明瞭な地点間だけを線分で連結しているので、深さを目安に進行方向を決定するためには、表示画面からの情報を元に行わなければならなという問題があった。
【解決手段】 GPSアンテナ1にGPS受信器2が接続され、GPS受信機2に位置情報検出部3が接続され、この位置情報検出部3に位置情報メモリ4が接続され、位置情報メモリ4に方位・船速計算部5が接続され、この方位・船速計算部5の出力と地図データ出力部6からの出力は地図深度データ検出部7に入力され、さらに、地図深度テータ検出部7の出力は予想海底画像作成部8に入力され、この予想海底画像作成部8の出力は画像用メモリ9に記憶される。
(もっと読む)
目標深度計測装置
【課題】船底に搭載した送受波器により高精度で安定した深度計測結果を得る目標深度計測装置を提供する。
【解決手段】目標深度計測装置は、送波制御を行なう送信部と、送信部からの制御に基づき音波を送信し、かつ目標からの反射成分を含む信号を受信する送受波部と、送受波部からの受信信号から上下スプリットビームで構成される指向性ビームを複数ビーム形成する受信部と、受信部からの指向性ビームデータから目標深度を計測する目標深度計測部で構成する。目標深度計測部において、各指向性ビームで受信したデータの最大レベルの指向性ビームデータを採用することと、採用した上下スプリットビームデータに対して時間軸方向へ移動平均処理を行なうことと、目標深度として目標からの反射信号の最大レベルを基準に、送信毎に得られる目標深度データを複数データ累加した値を適用することにより、高精度で安定した深度計測結果を得る。
(もっと読む)
水底地形測量方法およびシステム
【課題】水深が深い場合であっても水底地形を精度よく測量できる水底地形測量方法およびシステムを提供する。
【解決手段】GPSアンテナ2とウインチ5を設置した作業船14に、ウインチ5で繰出しおよび巻き取られるケーブル6を介して、ナローマルチビーム測探ソナー8、3軸加速度計測器9および水深計10を設置した曳航体7を接続し、超音波水中位置測量装置11の送波器11aを曳航体7に、受波器11bを作業船14に取付け、作業船14の移動速度とウインチ5の駆動の少なくとも一方を制御して曳航される曳航体7の深さ位置を調整して水中移動させつつ、ナローマルチビーム測探ソナー8、3軸加速度計測器9、水深計10の検知データ、GPSアンテナ2から送信される作業船14の位置データ、受波器11bが受信した曳航体7の位置データを制御装置4に入力する。
(もっと読む)
合成開口ソーナー
【課題】合成開口ソーナーにおいて海底堆積層に埋没した物体を正確に画像化するための、信号処理装置を提供する。
【解決手段】海底堆積層の音波伝搬時間と、堆積層がない場合の音波伝搬時間との時間差を、ソーナー受信信号のリサンプリングもしくは合成開口処理におけるカーバチャ形状の補正として与えることで、海底堆積層が存在することによる合成開口処理後画像中の対象物の輝度・コントラスト・位置精度などの描出性能を向上させる。さらに、前記手段をDPCやMEAなどの動揺修正手段と組み合わせることで、船体の動揺がある場合にも埋没物を精度良く描出する。
(もっと読む)
スキャニングソナーの表示装置、水深表示方法、及び水深表示プログラム
【課題】ユーザの監視負担を増やさずに、ユーザが直感的に探査範囲の水深を把握できるよう、水深を表示するスキャニングソナーの表示装置を提供する。
【解決手段】スキャニングソナーの表示装置が、探信音を受信するためのペンシルビームの軌跡である円錐体表面に沿った傘型の水平断面の探査データを取得し、前記探査データに基づいて画像フレームデータを作成するフレームデータ変換部4と、前記探信音の探査範囲の水深を算出する水深計算部6と、前記水深に応じて同心円で区別される領域を有する前記画像フレームデータの背景画面を作成する背景画面作成部7と、前記画像フレームデータと前記背景画面を重畳し、重畳された画像フレームデータを作成する表示画面作成部5と、前記重畳された画像フレームデータを表示する表示部8と、を備える。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
水中航走体および障害物探知装置
【課題】海底の様子だけでなく、海面近くの状態も探知することの可能な障害物探知装置並びに該障害物探知装置を備えることにより、比較的浅い海域を円滑に航走することのできる水中航走体を提供することを目的とする。
【解決手段】水中航走体1に互いに間隔をあけて設けられ、該水中航走体1の前方に向けてビームを送出するとともに、該ビームの反射波を受信可能な複数のセンサからなるセンサ群3と、複数のセンサの検出結果から前方の障害物を検出する処理部とを具備し、各センサは、各センサから送出されるビームが交差することなく、かつ、前方に設定されたそれぞれ異なる目標領域に対して送出されるように配置されている。
(もっと読む)
水中航走体の速度計測システム
【課題】マルチビームを用いることによって、一部の測深データを計測できなくても特徴箇所と速度を求められるようにする。
【解決手段】開示される水中航走体の速度計測システムは、水中航走体3に対してマルチビーム測深機301と、演算処理部310とを具えることによって、マルチビーム測深によって得られた水深メッシュデータから特徴箇所を検出するとともに、検出された特徴箇所から水中航走体の速度計算を行うことができるように構成されている。
(もっと読む)
水中探知装置
【課題】グレーティングローブによる虚像の表示を防ぐことのできる水中探知装置を提供することを目的とする。
【解決手段】本発明の水中探知装置は、超音波信号を送信し該超音波信号のエコー信号を前記複数の素子で受信する送受波器13と、第1受信開口および該第1受信開口と素子が少なくとも一つ異なる第2受信開口を形成する受信開口形成部16と、前記複数の素子のうち前記第1受信開口を形成する素子群が受信したエコー信号を合成し第1受信信号を生成する第1受信信号生成部17aと、前記複数の素子のうち前記第2受信開口を形成する素子群が受信したエコー信号を合成し第2受信信号を生成する第2受信信号生成部17bと、前記第1受信信号および前記第2受信信号のうち信号レベルの小さい受信信号を選択する選択部と、前記選択された受信信号に基づいて表示を行う表示部と、を備えたことを特徴とする。
(もっと読む)
魚群探知機
【課題】魚群の位置や移動方向を容易かつ迅速に理解できる魚群探知機を提供する。
【解決手段】画像表示器9の反響波表示領域27に、上下の基準線Lに対して左右対称の水深方向が設定され、且つ該基準線Lに沿って時間軸Tが設定された左右の区画表示域27a,27bを備え、船の左側に備えた送受波部20aから得た反響波情報を、左区画表示域27aに、船の右側に備えた送受波部20bから得た反響波情報を、右区画表示域27bに、時間軸Tに沿って時系列順に夫々表示するようにしたものであるから、船の左右いずれの方向に魚群がいるかを容易に理解できると共に、左右の反響波情報を容易かつ直感的に関係付けることでき得るため、釣果が向上し易い。
(もっと読む)
水中探知装置
【課題】
尾引き信号に影響されることなく水面近くの魚群を探知でき、かつ、海底からのエコーや、尾引き信号の影響を受けてない水面から離れた深度範囲に分布している魚群からのエコーを、本来の信号強度に対応した色で表示することができる水中探知装置を提供すること。
【解決手段】
尾引き信号除去処理を行う深度範囲を最適に制御する尾引き信号除去範囲制御部12を設け、尾引き信号除去部6における尾引き信号除去処理を、尾引き信号の影響を受ける深度範囲に限定して行うようにした。
(もっと読む)
自動追尾スキャニングソナー
【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
魚群探知機
【課題】魚探画面において、魚群と水底の堆積層の詳細な状態を同時に把握することは困難だった。
【解決手段】対象を探知する探知信号を送信し、反射信号を受信する送受信部と、反射信号に基づいて水深または水底を検出する検出部と、反射信号を可視化する際、反射信号のうち、水深または水底を基準としてユーザからの設定により定まる境界の上方の反射信号からユーザからの設定による第一の感度で第一の対象を選別可能とし、境界の下方の反射信号から第一の感度とは異なるユーザからの設定による第二の感度で第二の対象を選別可能とし、表示処理部は、境界の上方を一つの探知画像の第一表示領域に表示させ、境界の下方を一つの探知画像の第一表示領域より下方の第二表示領域に表示させる魚群探知機とする。
(もっと読む)
自動追尾スキャニングソナー
【課題】
自動追尾スキャニングソナーにおいて、魚群等の標的のサイズ、速度が刻々変化し、或いは、予測値と観測映像との間に誤差が発生している状況でも、最適な抽出領域(位置、サイズ)を決定できるスキャニングソナーを提供する。
【解決手段】
魚群等の標的の、見掛け上のサイズの変化、加速度の変化、予測値と実測値の誤差(差分)等を、過去の複数フレーム分のデータも加味して比較・分析することで、標的の最適な抽出領域(位置、サイズ)を決定する。
(もっと読む)
1 - 20 / 46
[ Back to top ]