
Fターム[5J083AE03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180)
Fターム[5J083AE03]の下位に属するFターム
魚 (117)
Fターム[5J083AE03]に分類される特許
41 - 60 / 63
目標運動解析方法及び装置
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、音響センサ固有のバイアス誤差と音響センサを搭載する観測体の向きに基づくバイアス誤差とに対応するバイアス誤差成分に関する複数のインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
音波を放出するターゲットの方位測定方法
複数の電気音響変換器(11)を有する細長い水中アンテナ(10)によって、音波を放出するターゲットの方位を測定するための方法を提供する。本方法では、前記電気音響変換器(11)の受信信号から、水中の測定された音速値(Cmess)を使用して方位選択的に、前記ターゲットの水平方向のターゲット方位を求める。このような水中アンテナに付随して、とりわけ方位角が大きくなると方位測定結果に誤りを生じさせる原因となるシステム的な方位測定誤差を補償するため、音波伝搬モデルによって、前記ターゲット方位(βZk)によって予め決定されている音波伝搬方向での音波ビーム経過を計算し、該音波ビーム経過から、推定されたターゲット距離およびターゲット深度で、アンテナ位置における垂直方向の音波入射角(γk)を求める。垂直方向音波入射角(γk)から補正係数を導出し、該補正係数と前記測定された音速値(Cmess)とを乗算することによって該音速値(Cmess)を補正する。補正された前記音速値(Ceinstell)によって再び方位測定を行い、改善されたターゲット方位(βZk)を得る。  (もっと読む)
(もっと読む)
アクティブソーナー装置、ソーナー用受信信号処理方法、及びその信号処理プログラム

【課題】安定した信号検出性能を保持しつつ検出精度を上げて信号検出時刻の時間分解能を向上することが可能なアクティブソーナー装置等を提供すること。
【解決手段】受信信号を、信号送信部1で生成した直線周波数変調波のパルスからなる送信信号の周波数変化率と同じ周波数変化率を持つサンプリング周波数でサンプリングした後にフーリエ変換を行ってエコー信号を検出し、最大のレベルの検出された時刻部分の信号のみを切り出すサンプリング変換処理手段4と、このサンプリング変換処理手段4で切り出した受信信号と送信信号との相互相関を演算するレプリカ相関処理手段5とを備えたことを特徴とする。
(もっと読む)
水中測位システムおよび水中測位方法
【課題】SBL方式の双曲線航法で測位対象物の測位を精度良く行う。
【解決手段】測位対象物に設けられたピンガ5から発せられた音響信号を含む音響信号をハイドロフォン1〜4で受信してAD変換器10でデジタル信号に変換(入力信号)する。入力信号は直交検波、デシメーション、帯域制限の各処理が施される。信号検出部20は、各処理の施された入力信号にピンガ5から発信された音響信号に対応するデジタル信号が含まれるか否かを検出する。これが検出された場合に、到達時間差算出部24が、相異なる入力信号間でラグ値ごとに相関関数演算を行い、この演算結果のピーク値を与えたラグ値から、相異なる2個のハイドロフォンによって受信したピンガ5からの音響信号の到達時間差を求める。この到達時間差を用いてピンガの位置が特定される。
(もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 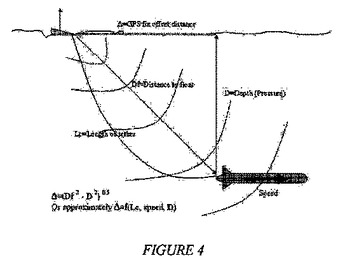 (もっと読む)
(もっと読む)
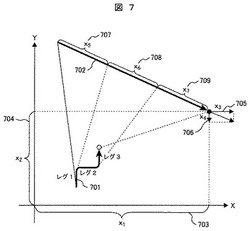
横距離探知率曲線算出装置及び方法、横距離探知率曲線算出用プログラム
【課題】 任意のソーナー捜索中心方位に応じて横距離探知率曲線を算出する。
【解決手段】 ソーナー捜索中心方位検出部1でソーナーを搭載するビークルからソーナービームを指向する方位を検出し、距離対探知率曲線取得部2でソーナー捜索中心方位における探知率断面分布から特定深度の距離対探知率曲線を算出し、最大・採用探知距離算出部3で距離対探知率曲線から一定探知率以上の範囲の最大値と最小値を算出し、通過距離算出部4で最大探知距離から最小探知距離までを通過する距離を横距離毎に算出し、探知機会数算出部5で発振間隔及び進行速力に基づき通過距離内での探知機会数を算出し、探知率積算部6で探知機会数とワンピング探知率に基づき探知率を積算する。
(もっと読む)
ソノブイ信号処理方式
【課題】ソノブイ信号処理において、周波数分析結果における雑音成分の周波数特性を補正しつつ、時間軸積分の積分時間を短縮し、周波数偏移の大きい信号のS/N低下を防ぐ。
【解決手段】主方向指向性ビーム形成部(3)は、DIFAR復調処理部(2)で復調されたNS,EW,OMNI信号を使用して、着目している任意の方位に指向性を向けたビームを形成し、他方位指向性ビーム形成部(4)は主方向を除く複数の他方位に指向性を向けたビームを形成する。周波数分析部(5)では、主方向ビーム及び他方向ビーム全ての周波数分析を行う。周波数成分平均化部(6)は、主方向を除く複数の他方位ビーム周波数分析結果に対して、周波数成分単位で複数の他方位ビーム間の平均処理を行う。主方位周波数成分正規化部(7)は、主方向ビームの周波数分析結果に対して、周波数成分平均化部(6)の出力を使用して、周波数成分毎の正規化を行う。
(もっと読む)
海中探査機器及び海中探査機器の水中部保持方法
【課題】ケーブルを介して海中探査機器の水中部を保持する際に、波の上下動による摩擦を低減して長時間の保持が可能な海中探査機器及び海中探査機器の水中部保持方法を提供する。
【解決手段】水中部3の上面にブラケット8を設け、ブラケット8に各軸の周りに回転自在な1対のローラ7を取り付ける。ローラ7には引留め紐6が夫々1回巻き付けられ、引留め紐6はローラ7間に設けられたカッター10に接続することでループ状をなす。引留め紐6は浮上部から吊り下げられたケーブル4に結ばれている。
(もっと読む)
全方向性モードで送信するように、曳航される線状送信アンテナへの電力供給を最適化するための方法
本発明は、ソナー送信手段に関し、特に、全方向性音波送信の実行を可能にする、送信手段に関する。本発明は、出力信号の波長よりも大きな、長さLの、曳航される線状アンテナであって、複数のP個の投射器によって構成され、投射器の間の間隔は実質的に/2未満である、線状アンテナを使用して、全方向性送信を実行するための方法に関する。本発明の方法は、主として、共通出力信号から生じる出力信号を各投射器に適用することにあり、前記共通信号はアンテナ内の投射器の位置に依存する非線形項を含む法則に従って表される遅延を割り当てられ、前記法則の適用は送出チャートの開口角が修正されることを可能にする。本発明は、特に、実質的に同じ直径の送信および受信アンテナを具備するソナー探知システムであって、それらの送信および受信アンテナを、同一のウィンチ上に巻き取ることが、それらを分離する必要なしに可能である、ソナー探知システムの実装を可能にする。  (もっと読む)
(もっと読む)
海洋哺乳動物に影響を及ぼす確率が低いソナーシステム及び方法
「海洋哺乳動物に影響を及ぼす確率が低い」(LPMMI)音波信号は、LPMMI波形と概ね同じ持続時間成分、概ね同じ帯域幅成分及び概ね同じ中心周波数成分を有するが、或る周波数変調を含む変調成分を有する、別の波形に従って別の音波信号を送信する場合に生じることによる海洋哺乳動物の行動反応を低減するように選択される、変調成分を有する。  (もっと読む)
(もっと読む)
送受信モジュールを有する音響システムの方法及び装置
音響システムの音響方法及び装置は、共通の送/受信制御信号に従って送信ソナーアレイの送信音響素子に送信することができ、受信ソナーアレイの受信音響素子から受信することができる送受信モジュールを使用する。  (もっと読む)
(もっと読む)
目標体運動解析方法及びその装置
【課題】 受波センサ位置の誤差によって生じる目標体状態量の推定値における誤差を抑制する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動する観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、観測時間差時系列に対して所定演算を実行して、目標体に関する状態量を推定する。そして、観測時間差時系列に基づき、目標体の位置及び速度と共に、受波センサ位置をも評価対象としたセンサ位置含有評価関数を構成し、この評価関数を最小化する目標体の位置及び速度、並びに、受波センサ位置を探索して、これらパラメータの推定値を得ると共に、受波センサ位置の推定値で、評価関数の構成に適用する受波センサ位置を補正することを特徴とする。
(もっと読む)
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体
【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
音響マルチスタティック・システムの構造
【解決手段】本発明はソナー・エコー検知の役目をする送信基地と受信基地の間の特定の通信モードを有するマルチスタティック・ソナー・システムに関する。本システムは特に、一般に用いられる無線通信又は衛星通信の使用により引き起こされる障害を回避することを可能にする。
送信基地により送信される信号は、本発明によるシステムの動作モードに関連する情報、特に送信の瞬間及び厳密な意味でのソナー・パルスを運ぶ通知パルスを備える。
本システムは特に周辺の物体の検知及び位置測定、又は自律的な水中機の位置測定を制御するための、潜水中の水中船による利用を意図している。  (もっと読む)
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサ位置の誤差によって生じる目標体の状態量の推定値の誤差を抑制できる目標体運動解析方法及び装置を提供する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動可能な観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、目標体の位置や速度などの状態量を推定する目標体運動解析方法及び装置に関する。そして、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、この観測時間差時系列に対して、推定誤差を最小とする最適化手法を用いて、目標体の状態量を推定し、観測時間差時系列、及び、目標体について得られた状態量の推定結果から、推定誤差を最小とする最適化手法を用いて、少なくとも一部の受波センサの位置を推定し、推定されたセンサ位置に、該当する受波センサの位置を補正することを特徴とする。
(もっと読む)
ソナーアレイ・システム
共通の軸上に配置された、水中聴音器からなる受信アレイおよび音響投射器からなる送信アレイを有するソナーアレイ・システム。ソナーアレイ・システムは艦船に結合され、単一の巻上機から単一の艦船船体貫通部を通して展開、回収することができる。艦船によって水中を曳航されるとき、ソナーアレイ・システムは、実質的に水平な送受信アレイを形成する。 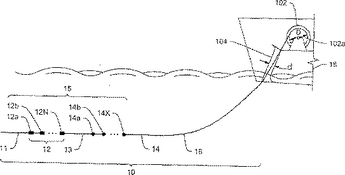 (もっと読む)
(もっと読む)
河床形状測定装置
【課題】 河底の凹凸,流速,水深にかかわりなく、河床形状,流速分布,流量を正確に測定できる河床形状測定装置を提供する。
【解決手段】 測定線に沿って水面を移動する移動測定機器5と、移動測定機器5で得たデータを処理するとともに移動測定機器の位置,移動速度,方向などを検出する基地測定機器6とからなる。移動測定機器5は、指向特性を狭くした1つの超音波センサからの超音波を河底に向けて照射し、照射開始から複数の超音波センサで受信した反射波検出までの時間と既知の水中音速とから河底までの距離を算出し、河床形状を測定する。また、河底に向けて放射した1本の超音波ビームのビーム領域中にある水中散乱体が単位時間中に移動する距離量を求め、流速に換算し、流速分布を測定する。基地測定機器6は、移動測定機器の位置,移動速度,方向などを検出し、移動測定機器5が測定した相対的河床形状,流速を補正し、真の河床形状,流速分布,流量を求める。
(もっと読む)
水中探知装置
【課題】尾引き信号に影響されることなく、水面近くの水中情報を正確に表示できる水中探知装置を提供する。
【解決手段】送信回路3から出力される送信信号に基づき、送受波器1から水中へ超音波を発射するとともに、水中で反射したエコーを送受波器1で受波して電気信号に変換し、この電気信号を処理して取り出されたエコー信号に基づいて水中情報を表示部8に表示する水中探知装置において、尾引き信号を除去してエコー信号のみを取り出すための尾引き信号除去部6を設け、表示部8の画面上で、表層魚群の映像が尾引き信号の映像で隠されずに明瞭に表示されるようにした。
(もっと読む)
合成開口ソナーのための方法及びシステム
合成開口ソナーのための方法及びシステムが、受信アレイが水域の中を動くのに応じて、受信アレイの改善された位置推定値を与える。 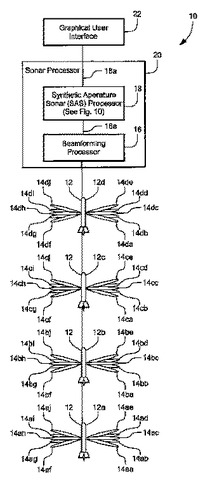 (もっと読む)
(もっと読む)
41 - 60 / 63
[ Back to top ]