
Fターム[5J083AE03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 水中移動体 (180)
Fターム[5J083AE03]の下位に属するFターム
魚 (117)
Fターム[5J083AE03]に分類される特許
21 - 40 / 63
位置検知システムおよび位置検知方法
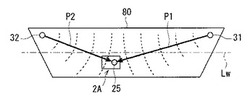
【課題】船体の外板におけるロボットの位置を精度良く検知できる位置検知技術を提供する。
【解決手段】ロボットの位置検知システムは、船体外板80の異なる位置に取り付けられ船体外板80に伝播させる音波を発信する2つの音源部31、32と、ロボット2Aに設けられ船体外板80を伝播した音波を受信する音波受信部25とを備えている。そして、この位置検知システムでは、各音源部31、32から発信された音波が船体外板80を伝播して音波受信部25で受信されるまでの各伝播時間と、船体外板80における各音源部31、32の位置情報とに基づき、ロボット2Aの位置を検知する。その結果、船体外板80におけるロボット2Aの位置を精度良く検知できる。
(もっと読む)
アクティブ・ソナーシステム

【課題】本発明は、アクティブ・ソナーシステムに関し、特にカーボンナノチューブを利用したアクティブ・ソナーシステムに関するものである。
【解決手段】本発明のアクティブ・ソナーシステムは、少なくとも一つの送信装置と、少なくとも一つの受信装置と、電気キャビネットと、を含む。前記送信装置は、少なくとも一つの送信トランスデューサを含む。前記送信トランスデューサは、少なくとも一つの第一電極と、少なくとも一つの第二電極と、音響素子と、を含む。前記音響素子はカーボンナノチューブ構造体を含む。該カーボンナノチューブ構造体は、前記第一電極及び第二電極に電気的に接続されている。
(もっと読む)
水中目標物探索システム、水中目標物探索方法及び水中目標物探索用プログラム
【課題】水中目標物探索システムの回路規模を削減して相関信号処理の負荷を軽減する。
【解決手段】送波装置10の励振信号生成手段12は、周波数が直線的に変化する第1励振信号を生成する低ドップラー感度励振信号生成部12Aと、周波数が非直線的に変化する第2励振信号を生成する高ドップラー感度励振信号生成部12Bと、第2励振信号を順次変調して周波数範囲が異なる複数の第2励振信号を生成するドップラー変調処理部12Cと、第1励振信号に複数の励振信号を付加して励振用合成信号を生成するパルス列生成部12Eと、を備える構成にした。送波装置10の送波手段11は、励振用合成信号に応じた音波を目標物30に向けて発信する。目標物30からの反射波は、受波装置に受信される受信信号と単一周波数レプリカ信号との相関信号処理によって受信信号に含まれるエコー信号が検出される。
(もっと読む)
水中画像全方位表示処理装置及び方法
【課題】送受波器自体が回転してしまう可能性があるソーナーの場合にも、適切な回転補正を行うことによって、全方位において正確な水中画像を表示する。
【解決手段】開示される水中画像全方位表示処理装置は、送波部S001〜S004において複数の送波アレイから順次送波したタイミングで、受波部において受波アレイR001を構成する複数個の受波素子で目標からの反射音を受信して取得したそれぞれの送波アレイからの放射音に対応する反射音の受波データに基づいて得られた画像処理後の位置データに対して、受波アレイで受信した三方向の回転行列による演算を行って、送受波器の向きをメモリ210のジャイロデータによってヨウ,ピッチ,ロールの三方位のデータとして随時取得する位置補正処理回路200と、取得したデータを用いて演算結果を送受波器固定座標から地球を基準とした絶対座標に座標変換を行って合成画像を得る画像合成処理回路220とを備えている。
(もっと読む)
ソナー・システム
【課題】船舶の移動中の操作を容易にし、船舶上の動く歩道からの高解像度画像を提供する船舶搭載可能ソナー・システムを提供すること。
【解決手段】船舶搭載可能な一体化ソナー・システムが提供される。船舶搭載可能な一体化システムは、少なくとも1つの画像ソナー・データ収集装置と、少なくとも1つの画像ソナー・データ収集装置に電気的、かつ取り外し可能に接続された少なくとも1つの処理システムとを含む。ソナー・データ収集装置は、好ましくは、処理システムに音響データを提供し、音響データを利用してソナー画像を生成する。また、システムは、関心のある標的の場所を突き止めるべく、データの正確な地理的に参照のためのデジタルのチルト及びアジマス方向を提供する。
(もっと読む)
画像ソナー用解析システム、画像ソナー用解析方法、画像ソナー用解析プログラム
【課題】ソナー画像から目標物を正確に識別する。
【解決手段】水上または水面下に位置する目標物の検出用ソナーが、送出した音信号の進行方向に沿って前記反射音レベルの分布解析を行うことにより得られた、前記進行方向の距離に対する反射音レベルの下がった割合が、予め設定された値より大きい領域をエッジ領域として検出するエッジ検出手段と、エッジ領域を端部として含み、且つ反射音レベルが2次元画像データに基づき算出された平均残響レベルより低い領域をシャドウ領域として検出する音圧レベル解析手段とを備えた。
(もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
水中航走体及び水中航走体の編隊航行方法
【課題】水深データベースが用意されていない領域についても航行効率を低下させずに、航跡検出精度を向上させること。
【解決手段】水深データベースが用意されていない領域においては、慣性航法装置及び対地速度計の計測値に基づいて現在位置を特定し、この現在位置を用いて航跡を生成し、水深データベースを有しない領域から水深データベースを有する領域に進入した場合に、水深データベースに基づいて検出された現在位置に基づいて、慣性航法装置及び対地速度計の計測値に基づいて現在位置を補正する。
(もっと読む)
狭帯域信号検出装置及び狭帯域信号検出方法
【課題】受信機から入力される狭帯域信号から、自己雑音を含まない信号を検出すること。
【解決手段】入力信号に対して、所定のサンプル時刻tの時間毎に得られる方位mのビーム、周波数nのビンにおける信号強度Xt(m、n)に基づいて、方位及び周波数方向にピークを検出するとともに、前記ピークの時間的なつながりであるラインのレベルに基づいて、ステータスを「検出」として判定するステータス判定手段4を有する狭帯域信号検出装置において、前記ラインが予め定めた条件に適合する場合に、前記ステータス判定手段4の判定結果から自己雑音24に関するラインを除去する不要信号除去手段を有する。
(もっと読む)
超音波送受波装置
【課題】超音波信号の掃引照射による三次元計測装置において、方位と距離の空間分解能を、同時に改善可能とする。
【解決手段】一次元配列振動子を、多数の部分口径に分割し、該部分口径ごとに駆動信号を印加して超音波信号を送信し、該送信信号が、目的物体により反射された信号を受信する構成において、部分口径の電極形状、駆動信号波形、駆動信号強度分布を新規に選定する事により、方位と距離の分解能を同時に改善可能とする。
(もっと読む)
目標運動解析プログラム、目標運動解析装置および目標運動解析方法
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、時系列観測方位データに対してバイアス誤差成分に関するインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
水中探知装置
【課題】グレーティングローブによる虚像の表示を防ぐことのできる水中探知装置を提供することを目的とする。
【解決手段】本発明の水中探知装置は、超音波信号を送信し該超音波信号のエコー信号を前記複数の素子で受信する送受波器13と、第1受信開口および該第1受信開口と素子が少なくとも一つ異なる第2受信開口を形成する受信開口形成部16と、前記複数の素子のうち前記第1受信開口を形成する素子群が受信したエコー信号を合成し第1受信信号を生成する第1受信信号生成部17aと、前記複数の素子のうち前記第2受信開口を形成する素子群が受信したエコー信号を合成し第2受信信号を生成する第2受信信号生成部17bと、前記第1受信信号および前記第2受信信号のうち信号レベルの小さい受信信号を選択する選択部と、前記選択された受信信号に基づいて表示を行う表示部と、を備えたことを特徴とする。
(もっと読む)
水中ナビゲーションの方法およびシステム
【課題】水中ナビゲーションの方法を提供する。
【解決手段】この方法は、ナビゲーションシステムを使用して、第1の速度測定値を、第2の速度測定値を有する1または複数の信号ビームに沿って投影し、第2の速度測定値は1または複数の信号ビームの少なくともひとつに関係する。この方法では、少なくとも第2の速度測定値の予測に基づいて、ナビゲーションシステムに関連する物体の位置および場所を決定し、このナビゲーションシステムは、第1および第2の速度測定値の共分散に基づき規定の測定範囲内で機能するように調整される。物体の位置および場所を決定する際に行われる性能調整は、1または複数の外部環境条件の故に各信号ビームを維持するナビゲーションシステムとは独立に動作可能である。
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム
【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
ソナー・バッフル及びバッキングに関する改良
ソナー・バッフル及びバッキングに関する改良:改良されたソナー・バッフル及びバッキングが開示される。これらのソナー・バッフル及びバッキングは、多孔質ポリマーを有している。これらのバッフル及びバッキングは、ポリアミド・パウダーの部分的な選択的な焼結により製造されることが可能である。本発明に基づくバッフル及びバッキングは、好ましい音響特性を呈し、困難を伴うことなく、複雑な幾何学的な仕様に製造されることが可能である。 (もっと読む)
音響反射用直交リフレクタおよび音響反射用直交リフレクタ組立体並びにそれらの使用方法
【課題】 反射指向性が、等分の角度となり、かつハウリング現象の無い音響反射用直交リフレクタおよび音響反射用直交リフレクタ組立体並びにそれらの使用方法を提供すること。
【解決手段】 正方形状の板状体の一つの対向する2角からそれぞれ二等辺三角形領域を除去した六角形状の基準板3と、基準板3の対角線のうち2点の頂点を結ぶ第1の線上で、基準板3に対して面対称となるように、基準板3と直交する第1の直交板1と、基準板3の他の対角線のうち2点の頂点を結ぶ第2の線上で、基準板3に対して面対称となるように、基準板3と直交する第2の直交板2とで構成され、第1の直交板1は、第2の直交板2と交差しており、第1の直交板及び第2の直交板は、矩形状で、長辺と短辺の長さの比率が√2×0.9以上√2×1.1以下の範囲とする。
(もっと読む)
アクティブソーナー装置およびアクティブソーナー装置による残響除去方法
【課題】複雑な海底地形が存在する海域の、海底地形に依存した音波の反射による、不要なエコー信号を残響として除去する。
【解決手段】本発明のアクティブソーナー装置は、送波器と、送波器から送波された音波の反射波を受波信号として受波する受波器と、地図上の位置における海底の深度を表す海底深度データと海底の障害物の位置を表す障害物データとを基に、反射が起こりやすい地形が存在する海域を検出除去海域として抽出する検出除去海域抽出部と、受波信号のレベルを算出する信号処理部と、受波信号のうち信号処理部にて算出されたレベルがあらかじめ設定されている閾値を越えている受波信号を、エコー信号として検出する信号検出部と、信号検出部にて検出されたエコー信号のうち検出除去海域抽出部にて抽出された検出除去海域にて反射したエコー信号を、残響として除去する検出除去判定部と、を備える。
(もっと読む)
目標運動解析方法及び装置
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、音響センサ固有のバイアス誤差と音響センサを搭載する観測体の向きに基づくバイアス誤差とに対応するバイアス誤差成分に関する複数のインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
21 - 40 / 63
[ Back to top ]