
Fターム[5J083BE06]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 積分 (29)
Fターム[5J083BE06]に分類される特許
1 - 20 / 29
検知装置および検知方法
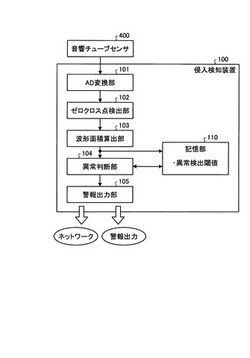
【課題】所望の音を高精度に検知することのできる検知装置を提供する。
【解決手段】音を検知するセンサと、センサにより検出された音の音響信号波形の振幅がゼロとなるゼロクロス点を検出するゼロクロス点検出部102と、ゼロクロス点間の音響信号波形の振幅の絶対値の総和である波形面積を算出する波形面積算出部103と、波形面積算出部103により算出された波形面積と、予め設定された閾値とを比較し、波形面積が閾値よりも大きい場合に異常が発生したと判断する異常判断部104とを備える。
(もっと読む)
被検体情報取得装置、被検体情報取得方法、及びプログラム

【課題】 FDI法ならびに適応型信号処理を用いて処理した場合、走査線の隣接間で連続性が乏しい部分が生じる可能性がある。
【解決手段】 本発明の被検体情報取得装置は、被検体からの弾性波を受信し複数の受信信号に変換するための複数の変換素子と、前記複数の受信信号を用いて整相加算処理を行い、複数の走査線信号を出力する整相加算手段と、前記複数の走査線信号を隣接する走査線間で加算して複数の合成走査線信号を出力する走査線信号合成手段と、前記複数の合成走査線信号を用いて周波数領域干渉計法及び適応型信号処理を行い、電力強度分布を取得するFDI適応処理手段と、を有する。
(もっと読む)
物体検出装置
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
パッシブソナー信号処理装置、パッシブソナー信号処理方法及びパッシブソナー信号処理プログラム
【課題】ブラインドゾーンもゴーストも発生しないパッシブソナー信号処理装置を提供する。
【解決手段】信号のレベルの方位チャネル間の増減比を計算する微分処理手段と、前記増減比の値に基づいて決められた区間毎に、該区間に含まれる方位チャネルの前記増減比を基に、合計増減比を計算する積分処理手段と、前記合計増減比の値に基づいて選択された相互に異なった複数の方位チャネルの前記合計増減比に基づいて、前記信号のS/N比を計算するS/N検出処理手段と、を備える。
(もっと読む)
薄膜トランジスタバックプレーンを用いた超音波撮像
【課題】撮像に必要な高分解能を提供するために、コヒーレント超音波二次元(2D)アレイの開口寸法が大きくなってきている。焦点調節のために個々の画素間で複雑な時間的調節を必要で、高速かつ高精度なエレクトロニクスを必要とするため、この技術を大面積アレイに拡張するのは困難であったが、TFT技術により受信回路を含んだ大口径アレイを提供する。
【解決手段】受信器アレイが、送信信号に対応する受信信号の同相成分および直交成分を検出するために基板上に複数の受信器要素を有している。受信器要素のそれぞれは受信器トランスデューサと薄膜トランジスタ(TFT)受信回路とを含んでいる。TFT受信回路は受信信号と複数の受信器要素全体にわたって分散された合成バイアス信号内の基準信号とを混合するための混合器を有する直交検出器を含んでいる。送信器は複数の受信器要素に音響的に接続され、撮像媒体を通じて送信信号を生成する。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
観測信号処理装置
【課題】観測装置と物標の間に相対速度が有る場合でも、良好なコヒーレント積分を行うことの出来る観測信号処理装置を提供する。
【解決手段】1探査当たり複数回の搬送波で変調されたパルス信号を探査信号として順次送出し、物標で反射された反射信号と、パルス信号の遅延変調パルス信号に基づいて複数の観測値を得、該得られた観測値をコヒーレント積分して積分値を外部に対して出力することの出来る装置であって、観測すべき領域に応じたコヒーレント積分回数を格納するメモリ、観測すべき領域に応じたコヒーレント積分回数分のパルス信号を探査信号として送出する手段、送出されたパルス信号の反射波を補足し観測値として蓄積する手段、概算相対速度を格納するメモリ、物標の概算相対速度に基づいて位相補正量を演算する手段、演算された位相補正量に基づいて、観測値について位相重み付きコヒーレント積分を行って外部に出力する手段から構成される。
(もっと読む)
砲撃体位置明確化のためのシステムおよび方法
【課題】超音速飛翔体の砲撃体を位置決めするための方法を提供する。
【解決手段】砲口爆風信号を抽出するために、時間ウィンドウを規定し、ウィンドウにおける全エネルギーよりも所定の比率だけ大きい、ウィンドウにおけるピーク信号を砲口爆風信号として認識する工程を含む砲撃体位置決め方法とする。
(もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラム
【課題】高い精度で位相誤差を検出、補正することを可能とする合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラムを提供する。
【解決手段】ストリップマップモードの合成開口ソーナーの位相誤差補正に関し、DPCA(Displaced Phase Center Antenna)等により空間的に位相中心をオーバーラップさせた送受信による受信信号から合成開口画像を生成する第1のステップと、合成開口画像の高いレベルのレンジビンのアジマスデータに対応する空間サンプルから位相誤差勾配の推定値を生成する第2のステップと、前記位相誤差勾配の推定値に基づいて前記空間サンプルの位相を補正する第3のステップと、を含むことを特徴とする。
(もっと読む)
超音波利用電子玩具
【課題】使用者が物体をアクティブに操作し、その操作の仕方などを競ったり、工夫したりすることによって、使用者に対して興味を持たせるようにした超音波利用電子玩具を構成する。
【解決手段】物体(43)を収容または載置する物体存在部に隣接して、超音波の反射体で囲まれた空間部(42)を構成する。信号処理部(40)は空間部(42)に設けた超音波センサ(23)を用いて超音波信号の送受信を繰り返し行い、異なる送信周期回における受信信号同士を比較して受信信号の変化の有無によって物体(43)の操作状態を検知し、その結果信号を出力する。
(もっと読む)
曳航式ソーナーの整相装置、整相方法及び整相プログラム
【課題】曳航アレイが非直線状になっても整相方位を地図上で固定できるとともに、整相方位を容易に特定できる、曳航式ソーナー等を提供する。
【解決手段】コンパス341〜34nが受波器211〜21nの位置の偏移量を計測し、その偏移量に基づき座標算出回路35が受波器211〜21nの座標(x1,y1)〜(xn,yn)を算出する。そのため、受波器211〜21nが直線状に並んでいなくても、受波器211〜21nの位置が座標(x1,y1)〜(xn,yn)として正確に捉えられる。そして、それらの座標(x1,y1)〜(xn,yn)に基づき遅延量算出回路36は受波器211〜21nが特定の方位からの音波S1〜Snを受信するように遅延量t1〜tnを算出し、これらの遅延量t1〜tnになるように整相回路371〜37nは受波器211〜21nで変換された電気信号s1〜snの位相φ1〜φnを整える。
(もっと読む)
音声到来方向推定・ビームフォーミングシステム、移動装置及び音声到来方向推定・ビームフォーミング方法
【課題】移動する音源から発せられる音声の到来方向をリアルタイムに推定するとともに、該音声についてリアルタイムにビームフォーミングを行う。
【解決手段】音声到来方向推定・ビームフォーミングシステム1が音源2から受信した音声をフレーム毎に短時間フーリエ変換し、現在のフレームについての受信信号ベクトルを取得し、該受信信号ベクトルを用いて、現在のフレームの一つ前のフレームまでの相関行列を更新して、現在のフレームまでの相関行列を算出する。そして、音声到来方向推定・ビームフォーミングシステム1が該現在のフレームまでの相関行列に基づいて、MUSICスペクトルを算出し、該MUSICスペクトルに基づいて、音声の到来方向を算出する。また、上記短時間フーリエ変換によって得られた受信信号ベクトルと到来方向とに基づいて、ビームフォーミング処理を行う。
(もっと読む)
移動物体検出装置
【課題】僅かしか移動しない物体でも検出できる移動物体検出装置を提供する。
【解決手段】二次元直交座標系において原点を始点とし一対のドップラー信号E,E’の振幅レベルの値Xn,Ynを終点とするベクトルRnが時間の経過に伴って回転するときの回転角φnを求めてこれを積算する。さらに回転角φnの積算値を閾値回路88にて所定の閾値と比較し、積算値が閾値を越えたときに検出信号を送出する。従来例のように一対のドップラー信号E,E’を2値化する際に欠落してしまう情報を含めてドップラー信号E,E’の変化を詳細に調べることができるから、従来例では検出し得なかったような僅かしか移動しない物体、例えば、同一象限内に留まる程度の移動しかしない物体Oでも検出することができる。
(もっと読む)
エコー画像の表示装置
【課題】ノイズ画像を抑制しつつ標的のエコー画像を鮮明に表示する。
【解決手段】水中の深度方向の所定範囲を分割して得られる複数のレイヤーのそれぞれについて、探知領域内の各地点におけるエコーを経時的に測定し、レイヤーごとに各地点のエコーレベルの平均値を算出する。次に、算出された各レイヤーにおける各地点のエコーレベルの平均値のうち、最大値を求める。そして、算出された最大値に基づいて、当該地点におけるエコー画像を表示する。例えば、地点Z1においては、魚群G1は全てのレイヤー1〜3にまたがって存在するが、エコーレベルの平均値が最も大きくなるのは、全ての深度に魚群G1が存在するレイヤー2であるから、レイヤー2のエコーレベル平均値に基づいて、地点Z1におけるエコー画像を表示する。
(もっと読む)
ソノブイ信号処理方式
【課題】ソノブイ信号処理において、周波数分析結果における雑音成分の周波数特性を補正しつつ、時間軸積分の積分時間を短縮し、周波数偏移の大きい信号のS/N低下を防ぐ。
【解決手段】主方向指向性ビーム形成部(3)は、DIFAR復調処理部(2)で復調されたNS,EW,OMNI信号を使用して、着目している任意の方位に指向性を向けたビームを形成し、他方位指向性ビーム形成部(4)は主方向を除く複数の他方位に指向性を向けたビームを形成する。周波数分析部(5)では、主方向ビーム及び他方向ビーム全ての周波数分析を行う。周波数成分平均化部(6)は、主方向を除く複数の他方位ビーム周波数分析結果に対して、周波数成分単位で複数の他方位ビーム間の平均処理を行う。主方位周波数成分正規化部(7)は、主方向ビームの周波数分析結果に対して、周波数成分平均化部(6)の出力を使用して、周波数成分毎の正規化を行う。
(もっと読む)
障害物検出装置および位置特定方法
【課題】複数の障害物で反射された反射波から、各障害物の位置を精度良く検出可能とする。
【解決手段】受信部121にて受信された反射波は、アンプ122により増幅され、検波部124により全波整流され、AD入力部127により積分される。このため、センサECU130は、包絡線波を得ることになり、この包絡線波の頂点時刻を判別し、立ち上がり推測値を求めて候補テーブルに格納する。また、センサECU130は、各包絡線波の頂点時刻の関係に基づいて、候補となる包絡線波の組合せを選定する。更に、算定した組合せに対応する立ち上がり推測値に基づいて、候補となる障害物の位置を算定する。そして、センサECU130は、算定した障害物の位置を時系列に保持し、移動平均によって、真の障害物の位置をそれぞれ特定する。
(もっと読む)
超音波システムでシグマ−デルタアナログ−デジタル変換器を用いた受信集束装置
【課題】超音波システムのデジタル受信集束装置において、サンプリングクロックの周期が変わってもシグマ−デルタアナログ−デジタル変換器の性能低下を防ぐことができる受信集束装置を提供する。
【解決手段】本発明による多数の変換子で構成された配列型変換器を備えた超音波システムのデジタル受信集束装置は、前記配列型変換器の各変換子に受信される超音波エコー信号の受信遅延時間に基づいて可変的にサンプリングクロックを生成し、生成されたクロックの周期に対応する制御信号を出力するための可変サンプリングクロック生成部と、前記配列型変換器の各変換子に連結され、各変換子で出力されたアナログ信号を前記サンプリングクロックと制御信号に応答してデジタル信号に変換するための複数のシグマ−デルタアナログ−デジタル変換器と、前記受信遅延時間に基づいて前記シグマ−デルタアナログ−デジタル変換器の出力信号を遅延するための遅延部と、前記遅延された信号を加算するための加算器とを備える。
(もっと読む)
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。その際、受信手段2の受信器で抽出した信号の少なくとも1サイクル分を単位として基準発振器に同期したサンプリング周波数でデジタル信号に変換し、このデジタル信号と、SinおよびCosのルックアップテーブルとの積和演算を行うが、そのときの−1の乗算はデジタル信号の補数を求めることにより行う。
(もっと読む)
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体
【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
1 - 20 / 29
[ Back to top ]