
Fターム[5J083DB02]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 応答器を用いるもの (85) | 応答器の構成 (83) | トランスポンダ (34)
Fターム[5J083DB02]に分類される特許
1 - 20 / 34
海中ネットワーク管理システム、及び海中ネットワーク管理方法、移動体装置
距離検出システム
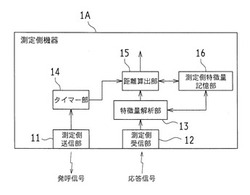
【課題】測定側機器からの発呼信号とこれに対応する応答機器からの応答信号とにそれぞれ特徴を持たせることによって、応答機器までの距離の算出を可能とする。
【解決手段】測定側機器1Aは、測定側特徴量が連続的に変化する発呼信号を送信する測定側送信部11と、応答側機器から送信されてくる応答信号を受信する測定側受信部12と、受信した応答信号の応答側特徴量を解析する特徴量解析部13と、発呼信号を送信したタイミングから一定時間を計測するタイマー部14と、応答側機器から受信した応答信号の応答側特徴量の解析結果に基づいて、一定時間経過後に測定側機器1Aと応答側機器との間の距離を算出する距離算出部15と、応答側機器の応答側特徴量記憶部に記憶されている応答側特徴量を記憶する測定側特徴量記憶部16と、を備えている。
(もっと読む)
超音波距離測定システム

【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
海底音響映像システム
【課題】合成開口技術とインターフェロメトリ技術を用い、海底面及び海底面上、及び海底面下の物体の三次元画像を高分解能で生成可能な海底音響映像システムを提供する。
【解決手段】海中を航行するプラットフォーム60に取り付けられ、航行する方向に垂直な向きで海底面に第1探査波を照射する送波器72と、航行する方向に垂直な方向、且つ前記第1探査波の照射方向に交差する方向に配列され、反射波をそれぞれ受波する受波アレイ74と、反射波から合成開口処理情報を生成する合成開口演算処理部と、前記プラットフォーム60の位置情報を生成する慣性航法装置と、合成開口処理済みの反射波同士の位相差に基づいて反射波の到来角を算出するとともに、前記到来角と、前記位置情報と、に基づいて反射波の反射源の三次元の位置を算出するインターフェロメトリ演算部と、を有する。
(もっと読む)
水中作業管理装置
【課題】水中ポジショニングシステムを利用した水中作業において、潜水士に喚起する手段、例えば、警報や退避指示を水中ポジショニングシステムから直接送る伝達手段を提供する。
【解決手段】水中作業管理装置は、船11に設けた送受波器12から発射される超音波を、潜水士13が携帯するトランスポンダ14で受信し、該受信した信号に対応する超音波信号を発射し、該発射した超音波信号を前記船に設けた送受波器で受信することで、前記潜水士が携帯するトランスポンダの位置を測定する水中ポジショニングシステムであって、前記トランスポンダに、前記送受波器から発射される特定の超音波信号を受信するとバイブレートするバイブレーション機構16を備えたことである。
(もっと読む)
水中測位システム及び水中測位方法
【課題】水中に存在する複数の測位対象物を簡易な構成によって確実に識別する。
【解決手段】水中に存在する複数の測位対象物2A〜2Nに設けられた複数の超音波発信装置5から、それぞれ、所定のビット数の論理符号配列を有する符号列C1〜C24の識別情報を含む擬似雑音信号S3によって生成された超音波識別情報SA〜SNを送波して、中央測位装置6において受波した超音波識別信号SA〜SNと相互相関基準信号S13とを相互相関演算することによって一致検出信号S14R、S14Lを得るようにしたことにより、水中の複数の測位対象物2A〜2Nを、簡易な構成によって、確実に識別できる水中測位システム1を実現できる。
(もっと読む)
水中航走体の航走制御方法及び装置
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
水中航走体の位置較正方法及び装置
【課題】 音響通信の速度が限られていても精度よく較正できるようにする。
【解決手段】 水中航走体6を、緯度方向位置検出用経路22と経度方向位置検出用経路23に沿って航走させながら、支援船7側より音響測位を行う。得られた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yのみを、音響通信を介して水中航走体6の水中航走体制御装置15へ与える。水中航走体制御装置15では、緯度方向と経度方向の各位置検出用経路22,23を航走したときに水中航走体6が自身で計測していた慣性航法位置d4の緯度成分と経度成分の代表値d5x、d5yを求め、これを支援船7側より与えられた音響測位位置D4の緯度成分と経度成分の代表値D5x,D5yより減算して緯度方向と経度方向の偏差δx,δyを求め、この緯度方向と経度方向の偏差δx,δyにより水中航走体6が自身で計測していた慣性航法位置d4を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】 音響通信が不安定でも位置較正を実施できるようにする。
【解決手段】 水中航走体を、慣性航法位置に累積誤差がなくて精度が高い状態のときに、緯度方向と経度方向の各アップデート用経路22,23に沿って航走させながら、支援船側より音響測位を行い、得られた音響測位位置24aの緯度成分の代表値を緯度方向基準値25、音響測位位置24bの経度成分の代表値を経度方向基準値26とする。その後、慣性航法位置に誤差が累積した水中航走体を、緯度方向と経度方向の各位置アップデート用経路22,23に沿って再び航走させ、この際、支援船側からの音響測位で得られる音響測位位置27aの緯度方向の代表値28、及び、音響測位位置27bの経度方向の代表値29を、緯度方向と経度方向の各基準値25,26と比較して緯度方向と経度方向の偏差δx、δyを求める。この偏差δx,δyにより水中航走体の慣性航法位置を較正させる。
(もっと読む)
水中航走体の位置較正方法
【課題】狭い領域で運用する水中航走体についても、精度よく較正できるようにする。
【解決手段】水槽22内で運用される水中航走体について、水槽22の短辺22aと長辺22bに平行に沿わせて位置検出用経路23aと23bを長く設定する。水中航走体を自身で検出する慣性航法位置を基に各位置検出用経路23aと23bに沿って航走させるときに、支援船側より音響測位を複数回行う。上記各位置検出用経路23aと23bごとに、得られる音響測位位置D4と、慣性航法位置について、それぞれ直交する方向の代表値を求め、求められた両代表値の差として、各位置検出用経路23a,23bに直交する方向に関する慣性航法位置の偏差δxとδyをそれぞれ求め、この偏差δx,δyにより水中航走体が自身で測位する慣性航法位置を較正させる。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
超音波による波浪計測方法および波浪計測システム
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に係留されたブイ1の海面下に設けられた超音波送受信機2から海中に超音波を発信すると共に、ブイの下方の海面下に配置された3つのトランスポンダ3からの超音波を時刻信号と一緒に受信し、トランスポンダから発信した超音波を受信するまでの片道伝播時間に基づき各トランスポンダと超音波送受信機との間の距離を検出し、この距離データにハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機のトランスポンダに対する方位角及び俯角を係数とする超音波送受信機の三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成すると共に、この三元一次連立方程式を解いて少なくとも短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
音響反射体
本発明による音響反射体は、コアを取り囲むシェルを含み、このシェルは、シェルの表面に入射した音波をコア内に伝達して集束させ、入射領域の反対側に位置するシェルの領域で反射させて、反射体から反射音響信号を出力することができる。また、シェルはコアを有し、シェルのコアに対する寸法は、シェル壁に入射した音波の一部がシェルに結合し、シェルの円周に沿って誘導され、次に再放射され、反射体から出力された反射音響信号と合わさって強い反射音響信号が出力されるように設定される。コアにおける音波伝達平均速度に対するシェルにおける音波伝達速度の比は、好ましくは2.74〜3.4であり、より好ましくは2.74〜2.86である。水中のパイプラインへの応用や、洗掘の測定及び反射体のアレイにも適用できる。 (もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 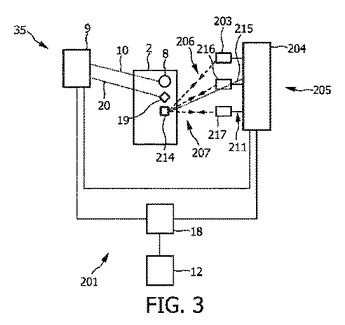 (もっと読む)
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】高精度、配置しやすさ、較正不要、低コスト、装置内調整および柔軟性などの利点がある、対象の所在確認および追跡を行う単一装置上の位置決定機能(POD)、自律型超音波屋内追跡システム(AUITS)を提供する。
【解決手段】AUITSは、RF信号および超音波信号を送信するためのRFトランシーバ205および超音波送信器206を含み、移動する対象に設置されたタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し、移動する対象の所在を確認するPOD202とを備える。PODは、複数のリーフモジュール207から構成され、各リーフモジュールに位置信号の受信器208があり、タグ装置から送信された位置信号を受信し、リーフモジュール間に既知の構造トポロジー関係がある。次に、各位置信号受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、対象の位置が計算される。
(もっと読む)
移動体通信及びその位置測定
超音波位置測定システムは、基地ユニットと少なくとも一つの移動ユニットとを備えている。移動ユニットおよび基地ユニットの各々は超音波信号を送信および受信するように動作可能となっている。移動ユニットは、前もって決められた信号を基地ユニットの送信状態に従って送信するように構成されている。基地ユニットは、信号が移動ユニットから基地ユニットまで伝わるのにかかる時間を測定することにより移動ユニットと基地ユニットとの間の距離を計算するように構成されている。 (もっと読む)
探知装置及び探知用プログラム並びに探知方法
【課題】物体と探知位置との位置関係に拘束されることなく、物体を探知する。
【解決手段】擬似音源と、監視ユニットとを有している。前記擬似音源は、アクティブ位相共役処理を行うことで音響信号に基づいて時間領域の位相共役波の走査音波を生成し、前記走査音波が前記音響信号の発生源である擬似音源に集中する特性を利用して、前記走査音波を伝搬空間内の探知物の上方から探知物に集中させる。前記監視ユニットは、パッシブ位相共役処理を行うことで、前記伝搬空間内を音波から前記探知物で反射した反射音波を抽出する。前記抽出した反射波の有無により、探知物を探知する。
(もっと読む)
物品位置検出システム
【課題】多数の物品が段積みされた状態で収納されていても、各物品の位置を確実に検出可能とする。
【解決手段】各々について、三次元位置を示す情報が登録されるとともに、固有のID情報が付され、ID情報を示す赤外線と超音波を床面に向けて発信する複数の発信機3a〜3jと、複数の物品4a〜4xの何れかの近傍に位置したときに、その物品の識別情報を読み取るとともに、複数の発信機3a〜3jから発信される赤外線及び超音波の何れかを受信し、赤外線からID情報を読み取る端末機6a、6bと、端末機6a、6bで読み取られたID情報と、複数の発信機3a〜3jの各々の三次元位置を示す情報とに基づいて、識別情報を読み取った物品の位置を検出するコンピュータ10とを備える。複数の発信機3a〜3jは、赤外線及び超音波の発信方向が固定され、また、赤外線及び超音波の送信エリア33c、33eが相互に重ならないように配置される。
(もっと読む)
音響波および電磁波を使用して遠隔デバイスを標定するための方法
遠隔デバイスによって占有される空間領域をその波面が伝搬し、最終的に遠隔デバイスに到達するパルスを音響送信器から放出するステップと、オンボード マイクロフォンにより前記波面が検知された瞬間に、各遠隔デバイスから無線周波数パルスが放出されるステップと、遠隔デバイスから伝搬する無線周波数信号を無線基地によって取得し、それによりi番目の音響源とj番目の遠隔デバイスとの間の距離に比例する到達時間遅延の計算を可能にするステップと、遠隔デバイスの個数に等しい最大長Mを有し、かつ受信時間と推定音速の積として得られる一連の距離で構成される受信ベクトルを、i番目の源による各放出に対し形成するステップとによる遠隔デバイスの標定。N+1個の受信ベクトルを形成するために、上記ステップを全ての音響源に対して繰り返し、そこから導出された行列式を解くことによってデバイスの位置を算出する。 (もっと読む)
1 - 20 / 34
[ Back to top ]