
Fターム[5J083EB02]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示装置 (356) | 表示装置の構成 (133) | 画像メモリを持つもの (133)
Fターム[5J083EB02]の下位に属するFターム
複数画像メモリ (17)
Fターム[5J083EB02]に分類される特許
61 - 80 / 116
ガスハイドレート位置探知用方法及び装置
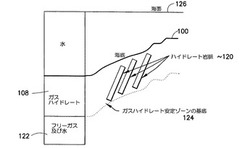
【課題】ガスハイドレート堆積物を位置探査する改良した技術を提供する。
【解決手段】ガスハイドレートが垂直又はほぼ垂直な岩脈内に蓄積する場合があるという可能性を考慮する電磁探査又は地震探査のいずれかを使用してガスハイドレート堆積物を検知・特性付ける調査パラダイムを提供。ガスハイドレート安定ゾーンの存在、ガスハイドレート安定ゾーンの下側にガスの豊富な供給源が存在する(又は存在した)ことの表示、及びガスの高いフラックスをガスハイドレート安定ゾーン内へ輸送することの可能性表示等の地質学的要因を調査ストラテジーの一部として考慮することが可能である。ウォークアウェイ垂直地震プロファイル技術等の地震技術、又は垂直又はほぼ垂直な岩脈の存在を検知すべく適合された電磁探査を使用してデータを収集することが可能である。1つの例においては、データ処理及び採取技術をハイドレート岩脈を検知すべく適合することが可能である。
(もっと読む)
位置検出装置、自律移動装置、位置検出方法および位置検出プログラム

【課題】音源物体の検出成功率を向上させるとともに安定させること。
【解決手段】ロボット装置100において、画像入力部112によって入力された画像と、音源情報の適用視覚情報とに基づいて画像処理手順を実行して音源物体102の視覚特徴を検出し、音源物体102の少なくとも方位を示す視覚定位情報を出力する視覚特徴検出定位部114と、音声入力部113によって入力された音声と、音源情報の適用聴覚情報とに基づいて音声処理手順を実行して音源物体102の聴覚特徴を検出し、音源物体102の少なくとも方位を示す聴覚定位情報を出力する聴覚特徴検出定位部115と、検出戦略情報に基づいて、視覚特徴検出定位部114または聴覚特徴検出定位部115を制御し視覚定位情報または聴覚定位情報から音源物体102の存在する位置を検出する音源物体検出部116とを備えた。
(もっと読む)
撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法
【課題】電波の使用が認められていない環境においても、画像を撮影した位置を正確に求めることができるとともに、画像と音声とを関連応付けて管理することができる撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法を提供する。
【解決手段】撮影指示と録音指示を取得する入力部11と、撮影指示を取得した場合に被写体を撮影する撮影部12と、3台の端末の位置を予め記憶する記憶部17と、撮影指示を取得した場合に光を放射する発光部13を有し、音波を受信する音波受信部14と、音波を受信した時刻と光を放射した時刻を取得する時刻取得部15と、音波を受信した時刻と光を放射した時刻との差と音速とに基づいて各端末までの距離を算出し、自撮影位置特定装置の位置を算出する制御部16と、録音指示を取得した場合に音声を録音する録音部51を有し、記憶部17は、撮影結果と録音結果と自撮影位置特定装置10aの位置を対応付けて記憶する。
(もっと読む)
動線計測システム
【課題】検出対象が移動した位置を追跡するにあたり、検出対象ごとの移動の履歴の分析を容易にするとともに情報の秘匿性を高めた動線計測システムを提供する。
【解決手段】送信装置1は定位置に固定され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体とするワイヤレス信号により識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波することにより受信装置2の位置を記憶部26に格納する。受信装置2は、検出対象を特定する固有情報を入力する固有情報入力部28と、制御部20で求めた送信装置1の位置の履歴と固有情報入力部28から入力した固有情報とを記憶する記憶部27と、記憶部27に格納した記憶内容を非無線の伝送経路で取り出すインターフェイス26とを備える。
(もっと読む)
表示装置
【課題】画面のレンジ切り替えや、センタ表示からオフセンタ表示への変更のような表示範囲の変化に起因した前記画面上での画像の非表示期間の発生を回避すると共に、リアルタイムでの画面表示を可能とする表示装置を提供する。
【解決手段】表示範囲制御回路150は、表示器180の画面の縮尺やレンジを変更して最大表示範囲1202が変化する際に、変更(変化)によって読み出しが不要となったアドレスのメモリ120内のデータについては、ゲート160に制御信号を供給して、当該ゲート160から表示器180への出力を0とすることにより、読み出しアドレス作成回路140からメモリ120に前記読み出しが不要となったアドレスが供給されても、そのアドレスのデータを表示器180に表示しないように制御する。
(もっと読む)
動線計測システム
【課題】検出対象の位置を追跡するにあたり、複数台の送信装置を互いに同期させずに動作させても各送信装置からの疎密波を受信装置で分離する動線計測システムを提供する。
【解決手段】送信装置1は、天井や壁などの定位置に固定され、疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体するワイヤレス信号により固有の識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波し疎密波の到来方向の情報を含む受波出力を出力する疎密波受波部21と、識別データを含むワイヤレス信号を受信する識別データ受信部22とを備える。受信装置2では、疎密波受波部22により疎密波を受波する期間を、識別データが受信された後に設定した既定の受波可能時間内に制限する。受信装置で求めた位置の履歴を蓄積して検出対象が移動した位置を追跡する。
(もっと読む)
離隔距離測定装置及び自走測定装置
【課題】送電線上を自走する自走測定機に送電線近接物との離隔距離を測定する測定器を備え、その測定データを地上に送信することにより、比較的に安価に且つ確実に送電線近接物との離隔距離を測定することが可能な離隔距離測定装置を提供する。
【解決手段】この離隔距離測定装置100は、山間部4に設置された送電線8の下方、その他の近接位置にある樹木群(送電線近接物)7との離隔距離を測定するシステムであって、送電線8上を自走する自走測定機6と、自走測定機6から送信されたデータを受信すると共に、自走測定機6の自走方向を制御する地上監視部10とを備えて構成される。
(もっと読む)
携帯型音源捜索装置
【課題】災害や事故の現場において、生存者が発する微弱な声や音を効率よく発見し、生存者の捜索、救助作業を支援する携帯型音源捜索装置の提供。
【解決手段】マイクロホンアレイ(MA)部1と、MA部1を支持するアーム部2と、MA部1から入力されるマルチチャネルの信号をAD変換するデータ変換部3と、データ変換部3からのデータ信号を無線によって受信するデータ受信部5と、MA部1が鋭い指向性を発揮するよう、受信されたデータ信号のチャネルごとの遅延時間を操作し、任意の方向から到来する音を選択的に合成した合成信号を出力する信号処理部6と、信号処理部6から出力された合成信号をDA変換し、音響信号として再生する音響出力部8とを備え、MA部1、アーム部2、データ変換部3、データ送信部4が一体に携帯可能に構成された携帯型音源捜索装置である。
(もっと読む)
小型ステレオ超音波受信装置及びそれを用いた水中物体の位置測定方法
【課題】小型で軽量の超音波受信装置、特に水中を遊泳する動物に直接装着することが可能な小型で軽量の超音波受信装置を提供すること。
【解決手段】CPU、帯域通過フィルタ、アナログデジタル変換器、メモリからなる回路、及び駆動用電池を防水ケース内に収納し、2個のハイドロホンを前記防水ケース内のCPUと接続し、前記メモリの一部に格納したプログラムソフトにより前記2個のハイドロホンで受信した音声信号を前記CPUで処理し、その振幅と時刻をメモリに記録するよう構成する。
(もっと読む)
自己診断機能付きロボット
【課題】低コストで自己診断を行うことができる自己診断機能付きロボットを提供することを目的とする。
【解決手段】自己診断機能付きロボットを、ロボット本体1と、ロボット本体に設けられる超音波距離センサ16,22と、ロボット本体1に設けられる右腕部4a、左腕部4bと、これら右腕部4a、左腕部4bの動作を制御する駆動制御部56と、超音波距離センサ16,22、右腕部4a、左腕部4b、及び駆動制御部56の診断を行う診断部73とを有する構成とする。診断部73を、駆動制御部56に、右腕部4a、左腕部4bを超音波距離センサ16,22の検出領域内と検出領域外との間で移動させる動作指令を送ったのちに、超音波距離センサ16,22の出力信号に変動が生じなかった場合に、故障が生じていると判定する構成とする。
(もっと読む)
複数の目標が可能な位相不定性の解決方法
位相測定の原理によって距離情報を得るために、少なくとも2つの変調された波長λiを有する周期信号が二つあるいはそれ以上の対象物体に送信され、その反射が受信され、関係する複数の位相φiが決定され、J個の対象物体に割り当てられる個々の対象物体の位相φijに分解される。位相の不定性を解決するために、少なくとも1つの対象物体が配置された不定性の間隔は、所定の幅を有する複数の区画5に分割され、その区画5はカウンタの読みと距離が割り当てられる。カウンタの読みは、可能性のある対象物体の距離に割り当てられる区画5に加算される。その加算は、周期性の連続な変数と全ての位相に対し実行される。絶対位相あるいは少なくとも二つの対象物体からの真の対象物体距離Djは、カウンタの読みの分布から決定される。  (もっと読む)
(もっと読む)
RFIDタグの位置特定の方法及び装置
RFIDタグが、当該タグの位置の確定を容易にすると同時に、タグのバッテリのエネルギー消費(306)を最小限する方法及び装置である。所定間隔で、タグは、その識別子をステータス情報と共に送信する(302)。ステータスが、タグが新たな位置にあることを示す場合(304)、タグは、当該タグの位置の確定に関与することにより追加のバッテリエネルギーを消費する(306)。異なる速度で伝播する2つの信号をインタロゲータから送信することにより(602/604)、インタロゲータからタグまでの距離が確定される。タグにおける2つの信号の到達時刻の差を確定することにより、インタロゲータからタグまでの距離を確定することができる(606)。  (もっと読む)
(もっと読む)
位相共役波による距離変動計測方法及び距離変動計測システム
【課題】距離の計測対象となる海底の2点間に、海流、水塊、渦、等の不均質が存在しても、この2点間の距離変動を十分な計測精度を以って計測することが可能である。
【解決手段】音源装置10と計測処理装置20とが、それぞれ海側プレート16の上面と陸側プレート22の海底に設置されている。音源装置から第1音響プローブ波が計測処理装置に送られ、これに対して、計測処理装置から音響位相共役波が音源装置に送り返されて基準プローブ波として保存される。次に、音源装置から第2音響プローブ波が計測処理装置に送られ、これに対して、計測処理装置から、複数の音響変調位相共役波を位相変調量の大きさの順序に従って順次音源装置に送り返されて、それぞれが計測プローブ波として生成される。これらの計測プローブ波と基準プローブ波とを順次干渉させて干渉波が生成される。干渉波の振幅が最小となる位相変調量から、音源装置と計測処理装置との距離の変動量を求める。
(もっと読む)
海底検出方法および魚群探知装置
【課題】所定深度毎にその深度での海底検出レベルを演算し、この海底検出レベルを移動することにより海底を検出する方法および装置を提供することにある。また、この海底検出レベルを、海底反射を含む反射信号が横切る深度を記憶し、当該反射信号が検出レベルを上回る場合、当該反射信号の最大値と海底検出レベルとの差を所定の範囲とすることにより、安定して海底を検出する方法および装置を提供することにある。
【解決手段】海底を検出する方法において、所定深度毎に海底検出レベルを演算し、受信機で増幅検波した反射信号を所定深度毎に演算した海底検出レベルと比較し、比較の結果により演算した海底検出レベルを移動することを特徴とする。
(もっと読む)
物体検出装置
【課題】人などの動く物体を静止する物体と区別して検出する。
【解決手段】物体検出装置は、複数の超音波センサ1a,1b,1c,1dが同一平面上に一列に配列されてなる超音波センサアレイ1と、各超音波センサ1a〜1dの出力信号(受信信号)を各別に遅延させる複数の遅延部2a,2b,2c,2dと、遅延部2a〜2dで遅延された受信信号を加算する加算部3と、加算部3で加算された受信信号のレベル(振幅値)の最大値を求める計測部4と、計測部4の計測結果を時系列で記憶する記憶部5と、記憶部5に記憶された計測結果から物体の存否並びに物体までの距離と方位を判定する判定部6とを備えている。
(もっと読む)
信号到来方向推定装置及び方法、並びに信号分離装置及び方法、コンピュータプログラム
【課題】 3次元での信号の到来方向の推定を行うことができ、ブラインド信号分離における信号分解能の向上に寄与する。
【解決手段】 非直線配置された少なくとも3個のセンサによって検知された信号を周波数領域の信号に変換する周波数領域変換部4と、該周波数領域の信号から、独立成分分析により周波数毎の分離行列を算出する分離行列推定部5と、該周波数毎の分離行列から、周波数別の信号の到来方向を算出する周波数別到来方向推定部6と、該周波数別の信号の到来方向から、信号の到来方向を算出する到来方向推定部7と、を備える。
(もっと読む)
超音波式積雪センサーおよびそれを用いた融雪装置
【課題】 積もった雪の質の影響による誤検出を回避して、積雪を高い信頼性で検出することが出来る、融雪装置に用いて好適な超音波式積雪センサーを提供すること。
【解決手段】 積雪がない状況下での基準距離に比して、測定距離が小さくなった場合に積雪があると判定する第一の積雪判断手段に加えて、測定距離が大きくなった場合に積雪があると判定する第二の積雪判断手段を採用し、更に積雪判定を一層安定化させるために、超音波の受波信号レベルの認識下限を設定して小さなレベルの受波信号を考慮しないようにする受波フィルタ手段を採用した。
(もっと読む)
魚群探知機を用いた停船位置決定方法およびそれに用いる魚群探知機
【課題】 本発明は、潮流角度およびアンカー角度情報を魚群探知機に入力し、GPSによって船の停泊位置を決定することができる魚群探知機を用いた船停止位置決定方法およびそれに用いる魚群探知機を提供することを目的とするものである。
【解決手段】 本発明は、自船2を魚群3の潮かみ位置に停船させて、自船2から潮流方位角度とアンカー方位角度を測定する工程と、前記潮流方位角度とアンカー方位角度に基づいて、前記魚群探知機8の表示領域1内にて魚群3から潮流方位角度が一直線上に自船2が位置するように仮想表示させることにより自船2の停船位置を決定することができる工程を備える。
(もっと読む)
車外音処理装置
【課題】さまざまな走行状態において、音響を発して接近する物体の検出が可能な車外音処理装置を提供する。
【解決手段】車外の音を収集するためのマイクロフォン1と、車両の状態を検出する車両状態検出部4と、マイクロフォン1で収集された音響信号を、収集されたときの車両状態に対応づけて蓄積する記憶部13と、車両の状態ごとに音響信号を所定の期間にわたって平均化した情報を車両の状態に対応づけて記憶する車両音−車両状態対比記憶部15と、車両走行時にマイクロフォン1で収集される音響信号と、音響信号が収集されたときの車両状態に対応する平均化された情報を比較する車両音比較部16と、車両走行時の音響信号とそのときの車両状態に対応する平均化された情報を比較した結果、車両走行時の音響信号が平均化された車両音より大きく、かつ逐次大きくなる場合に、車両に接近する物体があると判断する接近判定部17と、を備える。
(もっと読む)
磁気共鳴イメージング装置の音源位置推定方法および装置
【課題】冷凍機の稼動音が大きい環境下でもMRI装置に組み込まれたコイルから発生する音の到着時刻を正確に計測して、音源位置を推定する。
【解決手段】MRI装置を稼動する前の試験で、冷凍機7が稼動中、かつ、コイル5、6が非励磁状態のときに、冷凍機音用のセンサ11で計測した音響信号とコイル音用センサ12(1)〜(n)で計測した音響信号から、冷凍機音の伝達関数を予め算出しておく。MRI装置の稼動中には、冷凍機音用センサ11で計測した冷凍機音に、予め算出しておいた伝達関数を乗じて、コイル音計測用センサ位置12(1)〜(n)における冷凍機ノイズを推定し、コイル音計測用センサ12(1)〜(n)で受信した音響信号から推定ノイズを減ずることによってコイルで発生した音を明瞭化してから、音響信号の到着時刻を正確に計測し、音源位置を推定する。
(もっと読む)
61 - 80 / 116
[ Back to top ]