
Fターム[5J083EB02]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示装置 (356) | 表示装置の構成 (133) | 画像メモリを持つもの (133)
Fターム[5J083EB02]の下位に属するFターム
複数画像メモリ (17)
Fターム[5J083EB02]に分類される特許
81 - 100 / 116
送信モードリコメンドシステム、ソーナーシステム、送信モードリコメンド方法、そのプログラム及び記録媒体

【課題】広帯域の送信音波に対する探知距離、探知領域、目標存在圏のカバー率を短時間で算出し、かつ、残響レベルを実際の観測結果を利用して計算し、精度良く最適な送信モードを短時間でリコメンドするシステムを提供する。
【解決手段】テスト音波としてインパルス送信部1からインパルスを水中に送信し、受波器2で受信した受信信号からインパルス応答解析部13でインパルス応答を取得し、評価送信モード設定部11で設定した複数の評価送信モードの送信音波それぞれとインパルス応答とをたたみ込み積分計算部14で演算して、評価送信モードそれぞれにおける残響レベル、雑音レベルを求め、エコーレベル計算部16で算出した当該評価送信モード時のエコーレベルとシグナルエクセス計算部17で比較した結果に基づいて、探知距離及び/又は探知領域及び/又は目標存在圏のカバー率を算出することにより最適な送信モードを選択して表示部18に表示する。
(もっと読む)
位置検出システム

【課題】検出対象ごとの移動の履歴の分析を容易にするとともに情報の秘匿性を高めた位置検出システムを提供する。
【解決手段】送信装置1は定位置に固定され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体とするワイヤレス信号により識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波することにより受信装置2の位置を記憶部26に格納する。受信装置2は、検出対象を特定する固有情報を入力する固有情報入力部28と、制御部20で求めた送信装置1の位置の履歴と固有情報入力部28から入力した固有情報とを記憶する記憶部27と、記憶部27に格納した記憶内容を非無線の伝送経路で取り出すインターフェイス26とを備える。
(もっと読む)
水中探知装置
【課題】
衝突の可能性のある自船位置と障害物との位置関係及びその探索範囲を正確に把握することができる水中画面表示装置を提供することを目的とする。
【解決手段】
距離情報取得部3により送受波部1の設置位置と該自船の特定部位間の距離を取得し、該取得した距離情報に基づいて、断面エコー画面上に、自船の特定部位を表示することにより、実際に衝突・座礁を起こす船の水中部と障害物位置との距離を的確に把握できるようにした。また、位置・方位情報取得部により自船の位置及び方位情報を取得し、該取得した位置及び方位情報に基づいて、送受波部1で探知した探知領域の情報を水平座標系に表示することにより、物標の水平位置を容易に把握できるようにした。
(もっと読む)
河川データ測定方法及び装置
【課題】 測定装置を搭載した浮揚体の移動量の計測精度低下を防ぐ。
【解決手段】 超音波送受信器301から河底方向に所定の時間間隔で超音波を発信し、河底で散乱・反射された超音波を2次元状に配置された2次元超音波検出器303で受信し、超音波送受信器301から時間をおいて発信された2回の超音波それぞれに対応する2次元超音波検出器303の出力に基づいて河底からの反射波の強度分布と位相分布を信号処理装置304で求め、信号解析装置305で、信号処理装置304から出力される二つの強度分布と位相分布それぞれの間の相関の強度を、前記2つの強度分布、位相分布のうち、先に発信された超音波に対応するものを他方に近づけつつ移動距離の関数として求め、相関の強度が最大となる移動距離及びそのときの移動方向を前記2回の超音波発信の間の測定装置の移動距離及び移動方向とする。
(もっと読む)
伝搬特性計算方法及び装置並びに伝搬特性計算方法のプログラム
【課題】 反射面におけるエネルギー反射を考慮し、より現実に近い場の伝搬特性を計算することができる伝搬計算方法、装置等を得る。
【解決手段】 場において海水等の媒質を伝搬する音波等の弾性波の伝搬特性を、弾性振動に基づくエネルギーの伝搬経路を表す音線理論に基づいて計算する伝搬特性計算方法において、場に設定した音線を中心として広がったエネルギーが海底面等の反射面において反射したエネルギーによる鏡像音線音場等の反射伝搬特性を音場計算器3−b、補間器4−bによって計算し、場に設定した音線を中心として広がったエネルギーによる伝搬特性と、反射伝搬特性とを加算器7が加算するものである。
(もっと読む)
超音波人体センサ及びそれを有するトイレ装置
【課題】 トイレ空間のように狭く、多くの反射部材が存在する空間で複雑な反射を発生する状況でも人体の検知を容易に行える超音波人体センサに関する。
【解決手段】 監視空間に向け超音波を間欠的に送信し、送信に対する反射波を受信する超音波人体センサにおいて、受信波形変換手段から出力される受信波形データのうち、人体が存在していないタイミングで得られる受信波形データを基準波形データとして記憶する基準波形記憶手段と、前記受信波形変換手段から順次出力される受信波形データと前記基準波形データとを比較して前記両波形データ間に差分が認められる場合に人体が存在すると判定する判定手段とを有するとともに、前記判定手段は、前記差分が認められない状態となっても、その直前に、前記監視空間の近距離側の領域の差分が認められる時間が所定時間以上継続していた場合、人体が近接して存在すると判定する。
(もっと読む)
情報収集システム
【課題】 コン柱に張られた電線の弛度に関して、高い確度で異常発生を通報することのできる、情報収集システムを得ることを目的とする。
【解決手段】 地面との距離に応じた信号を出力する超音波センサと、当該超音波センサの出力情報及び自己の識別情報を送信する無線通信部とを有し、コン柱に付設されたセンサノードと、
上記センサノードから送信される伝送情報を収集し、収集した情報を、当該センサノードとは通信プロトコルの異なる他の通信ネットワークに伝送するゲートウェイサーバとを備え、各センサノードが、自己の通信可能距離内に存在する他のコン柱に搭載されたセンサノードとの間で、無線アドホックネットワークを構成するようにした。
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
ヘッドマウントディスプレイ装置及び移動支援データ提供装置
【課題】 マーチングバンドの陣形を形成する各演奏者を楽曲の進行に従って良好に誘導すること。
【解決手段】 マーチングバンドの隊列を組む各演奏者に、通信機能を搭載したヘッドマウントディスプレイを装着させる。そして、各演奏者の動きを統括する装置から、ある決められた陣形を作り出すのに必要な各演奏者の移動を支援する移動支援データを発信し、その移動支援データの内容を各演奏者のヘッドマウントディスプレイに表示させる。
(もっと読む)
多重ビームの形成方法および装置
【課題】 従来技術のビーム形成の限界を本発明によって処置する。
【解決手段】 時分割多重を用いたネットワークを形成する多重光を形成する装置および関連する方法が開示されている。並列な数セットの光線が所定のサンプリングクロックレートで動作するネットワークハードウェアに代えて、より単純で単一のハードウェア単一部分が、サンプリングクロック速度と成形されるビームの数との積に等しいより早い速度で動作する。各素子(26a〜26m)からの受信された各サンプルは、各ビームにつき一つのビットストリームに時分割多重化されている。これらの時分割多重方式の要素のサンプルは、要素ごとに望まれる位相変移/時間遅延を適用するために重みが付けされる(30、32)。各重み付けの結果は、カスケード遅延パイプライン(34)で延期され、所定の時分割瞬間にビームを成形するためにカスケードコンバイナ(36)で結合される。この処理は、次のビームを形成すべく、配列の各要素からの時分割多重サンプルおよび重み付けの次のセットのために所定の時間に繰り返される。この処理は、サンプル時間間隔の終端まで、すべてのビームのために繰り返される。 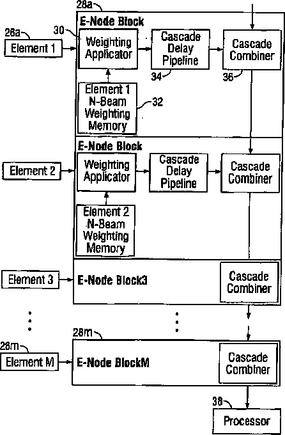 (もっと読む)
(もっと読む)
アクティブソナーのデータ解析方法及び記憶媒体
【課題】アクティブソナーにおいて、ターゲットから反射して得られたエコーデータは瞬間的に存在するのみであり且つこのエコーは様々な影響を受け、その包絡線は不規則で多種多様になる。そのため、斯かるアクティブソナーのエコーを画一的に解析し、2次元に可視化する方法はなく、統計的なものに頼らざるを得なかった。
【解決手段】検波後のエコーデータを画一的に解析するために、伝播損失補正正規化処理(ステップA2)を行う。そして、この補正後の波形データについて、特徴データ抽出処理(ステップA3)において、ピークレベル検出処理(ステップB1)、エコー長検出処理(ステップB2)およびエコー形状判定処理(ステップB3)を含む特徴データ抽出処理(ステップA2)を行う。また、特徴データを自己組織化マップに入力して学習を行って、これらの特徴に基づいて分類を行い、2次元可視化する。更に、補正後波形データを用いて誤分類データを検索し、マップ上に表示するための誤分類データ検索処理(ステップA12)を行う。
(もっと読む)
自走式機器およびそのプログラム
【課題】機器本体の停止時に人が衝突したり、つまずいたりする危険を少なくした自走式機器を提供することを目的とする。
【解決手段】機器本体101の停止時に人などの障害物接近を接近判定手段109で判定し、接近回数を記憶する接近回数記憶手段111でカウントし、制御手段104は接近回数が閾値以下の接近回数が少ない位置に停止の許可をするようにしたものである。これによって、停止を行う時に障害物の接近回数が少ない位置に機器本体101を停止することで、機器本体101の停止時に人が衝突したり、つまずいたりする危険を少なくすることができる。
(もっと読む)
超音波センサ信号処理システム
【課題】 遅延加算演算を用いた超音波センサ信号処理システムにおいて、リアルタイム処理を可能とし、記憶装置の容量を小型化すること。
【解決手段】 超音波センサ素子毎に、入力信号をA/D変換するA/D変換部2と、A/D変換部2から入力されたデータを記憶し、少なくとも遅延加算演算に必要な記憶容量のみ有する記憶部3とを備えるとともに、記憶部3に記憶されたデータに対して各角度毎の遅延加算演算を行う遅延加算部4を備えた超音波センサ信号処理システム1である。
【効果】 遅延加算演算に必要なデータのみ記憶部3に蓄積されれば、順次、遅延加算部4で各角度毎の遅延加算演算が行えるから、リアルタイム処理が可能となる。また、記憶部3は、少なくとも遅延加算演算に必要な記憶容量のみを有するように構成すれば良いから、記憶装置の容量を小型化できる。
(もっと読む)
超音波センサを用いた物体検知方法
【課題】超音波センサを用いた物体検知方法において、物体までの距離と物体の方位の検知精度を要求される精度に保持して物体検知の演算時間の短縮、及び物体検知のリアルタイム性の向上を図る。
【解決手段】超音波受波素子をアレイ状に配置してなる受波素子アレイを用いて物体の距離と方位を検知する。まず、超音波の送波と受波(#1)、受波信号のデジタル化(#2)、及びデジタル化したデータの収録(#3)が行われる。その後、物体検知の対象となる3次元空間が、距離と方位で定まる個々の小空間に分割される(#4)。選択された各小空間毎に物体検知のための遅延加算演算が行われる(#5)。小空間の分割と選択は、事前に物体が検知されたかどうか、どの範囲に注目しているか、どのような分解能で物体を検知しようとしているか、などの条件によって、動的に行われる。再演算又は再測定の場合、3次元空間の分割数や演算条件が変更される(#7)。
(もっと読む)
海の中の個人のための信号伝達/位置検出装置及びその使用方法
海の中の個人のための信号伝達及び位置検出装置及びその使用方法。この海の中の個人(1)のための信号伝達及び位置検出装置は、海の中の個人(1)が携帯し、第1の信号(2a)の搬送波を送信するように設定された個人警報器(2)を構成する超音波送信器と;海面上に配置され、個人警報器(2)によって送信された第1の信号(2a)を抽出することができる水中アンテナ(4)と、第2の超音波信号(2b)を送信する手段と、第2の超音波信号(2b)に応答して受信された超音波信号の関数として個人警報器(2)の位置を計算すること、及びGPS等の全地球測位システムの座標に前記情報を変換することができる手段と、無線受信機(6)を備えた携帯又は固定警報処理センター(7、8)にこれらの座標を示す信号を送信することができる電波(5)を送信するための装置と、を備える地表観測手段(3)と;を具備する。  (もっと読む)
(もっと読む)
釣り用リール及び釣り情報表示システム
【課題】釣り用リールの構成の簡素化を実現する。
【解決手段】この釣り用リールは、釣りに関する第2情報を表示する第2表示部63と各種のデータを保持する記憶部67とを有する釣り情報表示装置60に有線又は無線により接続可能であり、釣り情報表示装置60に有線又は無線により接続されるリール本体1と、リール本体1に装着されリールに関する第1情報を表示する第1表示部5と、釣り情報表示装置60の記憶部67に保持されたデータを元にリール動作の制御を行う第1リール制御部31と、を備えている。
(もっと読む)
異常診断装置および方法ならびにプログラム
【課題】 移動体に対するセンサの取り付け位置の制約を無くし、診断に関する信頼性の向上をはかる。
【解決手段】 移動体内の任意の位置にマイクや振動センサ等から成るセンサ1を設置し、車両異常診断装置3を構成するコンピュータ(演算処理装置)が、移動体内における音を取り込み、独立成分分析を行って音の分離と音源位置の特定を行うこととした。また、センサ1の設置位置近傍以外における診断部品の場所を特定し、移動体内の任意の場所における信号強度を推定して乗り心地や騒音に対する警告を行うこととした。
(もっと読む)
底質表示魚群探知機
【課題】 水底の第1反射波〜第n反射波に応じた表示ブロックB1〜Bnを表示するようにしているために、時間の経過とともに水底の低質がどのように変化しているかを知ることができないという点である。
【解決手段】 超音波振動子12は発振部13の出力側と受信部14の入力側に接続され、受信部14の出力はA/D変換部15に入力され、A/D変換部15の出力は記憶部16に接続され、記憶部16の出力は画像信号変換部17に入力され、記憶部16の出力は水底からの第2反射波が通過する時間だけ遅らせて開くように設定されたゲート部18に入力され、ゲート部18の出力は比較部19に入力され、比較部19でレベル記憶部20に予め設定されたレベル強度と比較され、レベル記憶部20からのレベル強度と一致したレベル強度信号を画像信号変換部17に入力され、画像信号に変換されて、表示部21で表示するように構成されている。
(もっと読む)
モジュール式診断用超音波装置
本発明は、コア・ユニットと、システム・エレクトロニクスと、I/Oポートを備えるモジュール式診断用超音波装置について述べる。上記コア・ユニットは、ハウジングと、ハウジング内のシステム・エレクトロニクス・パッケージとを備える。上記システム・エレクトロニクスは、1つまたは複数の連結されたフィルタを有し、フロント・エンド送受信回路と、プロセッサ、バック・エンド走査変換用回路と、システム・クロックと、プログラム可能なシステム・メモリ・デバイスとを含む。システム・エレクトロニクス・パッケージのフロント・エンドおよびバック・エンドに接続され、コア・ユニットハウジングを通って延びるI/Oポートも、少なくとも1つあり、すべてのシステム・データ処理情報が、少なくとも1つのI/Oポートを介して送信または受信される。  (もっと読む)
(もっと読む)
音源位置検出装置
【課題】 音源の位置を正確に検出することができる音源位置検出装置を提供する。
【解決手段】 前端に開口を有し該開口よりも後方に焦点を有する回転面形状の音反射内壁を少なくとも該開口側に有し内部空間が形成されたフードと、前記フード内に前方に向けて配置された振動面と、外部からの入射音による振動面の振動圧を検出する受音回路と、開口の中心が向く方向を表す方向情報を求める方向情報演算部と、受音回路によって検出された振動圧を、該振動圧を検出した時点の前記方向情報に対応付けて記憶する記憶部と、記憶部に記憶された振動圧と、該振動圧に対応付けられた方向情報との双方を用いて入射音の音源の位置を特定する音源特定部と、フードの前方を撮影する撮影部と、撮影部で撮影された画像を、音源特定部によって特定された音源の位置を表した画像に加工する画像加工部と、画像加工部によって加工された画像を表示する画像表示部とを備えた。
(もっと読む)
81 - 100 / 116
[ Back to top ]