
Fターム[5J084AB01]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 車両 (331)
Fターム[5J084AB01]に分類される特許
81 - 100 / 331
レーザスキャンセンサ
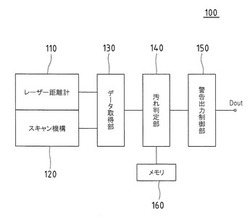
【課題】遠方の人体を確実に検知するとともに、測定方向によって測定距離範囲が比較的近いところに限定される場合などにはカバーが汚れているとの不用意な警告を抑止し、カバー全体で汚れ方にむらがある場合などにも適切な警告を行うことが可能なレーザスキャンセンサを提供する。
【解決手段】レーザスキャンセンサ100は、レーザ距離計110と、スキャン機構120と、データ取得部130と、汚れ判定部140と、警告出力制御部150と、メモリ160とを備えている。レーザ距離計110は開口部を有する筐体101の内部に配置されており、その開口部はレーザ光が透過可能なレンズカバー116で覆われている。汚れ判定部140において受光レベルとの大小比較を行う所定閾値を、測定方向毎の最大検知距離情報に基づいて変更する。
(もっと読む)
位置検出装置

【課題】位置検出に伴う計算量を削減し、処理の高速化及び装置の低コスト化を図る。
【解決手段】一対の画像からなるステレオ画像を所定の時間間隔で取得する画像取得部11と、前記ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内の検出対象領域にマッチングする前記比較画像内のマッチング領域を探索する探索部12と、前記基準画像内の検出対象領域の位置及び探索部12により探索された比較画像内のマッチング領域の位置から求まる視差に基づいて、当該ステレオ画像内に存在する物体の撮影地点からの距離を算出する距離算出部13と、距離算出部13により算出された距離に応じて、当該ステレオ画像の次に取得されるステレオ画像についての探索部12による前記比較画像内の探索範囲を変更する探索範囲変更部14とを備える位置検出装置である。
(もっと読む)
カラー式対象物表示システム
【課題】周囲の対象物をカラー画像として表示可能であり、しかも対象物までの距離が所定の距離より近いことを瞬時に認識できるように表示できるカラー式対象物表示システムを得る。
【解決手段】R画素、G画素、及び、B画素を有するカラー式CMOSセンサ19と、CMOSセンサが受光した赤外光に基づいて対象物までの距離が設定距離範囲にあるかを判定する距離判定手段22と、R画素、G画素、及び、B画素の電気信号に基づくカラー画像と、距離判定手段の判定結果に基づく判定結果画像とを交互に生成する画像処理手段23と、時間残像現象が生じ得る時間間隔でカラー画像と判定結果画像を交互に表示するモニタ24と、を備える。
(もっと読む)
走行車
【課題】前方の走行車を検出可能なスキャンセンサを備えた走行車において、スキャンセンサの誤検出を減らす。
【解決手段】走行車3は、走行車本体と、スキャンセンサ4と、フィルタ7とを備えている。スキャンセンサ4は、前方の走行車3を検出可能なセンサであり、測定範囲の一部の特定の光線が斜めに投射されるように水平面より傾けて配置されている。フィルタ7は、光量を減衰させるためのものであり、特定の光線に対して平面視で直交する方向に配置されている。
(もっと読む)
位置確認のために三次元位置と二次元強度のマッピングを組み合わせるための方法と装置
マッピング方法は、第1のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために該第1のモバイルユニットを使用する工程を含む。該特徴の三次元位置はマッピング中に検知される。三次元マップは、特徴の三次元位置と二次元の特徴のマップとの間の関連性を含むように作成される。三次元マップは第1のモバイルユニットから第2のモバイルユニットに提供される。第2のモバイルユニットは、第2のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために使用される。第2のモバイルユニットによってマッピングされた二次元の特徴の三次元位置は、第2のモバイルユニット内で、三次元マップを使用することにより測定される。 (もっと読む)
誘導装置及び目標判定装置
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
物体検知センサ
【課題】簡単に検知状態とすることができる物体検知センサを提供する。
【解決手段】本発明に係る物体検知センサ1Aは、床面Fからの反射波を検出する検出部5と、検出部5が検出した反射波に基づいて床面Fとの間に物体が存在しているか否か判定し、当該判定結果に応じた物体検知信号を出力する検知制御部8と、外部からの指令信号を受信するとともに、当該指令信号に基づいて検知モードを通常検知モードと強制検知モードとに切り替えるためのモード切替信号を出力する受信部6と、通常検知モードにおいては物体検知信号に基づいて物体が存在しているか否かを示すセンサ出力信号を出力し、強制検知モードにおいては物体検知信号とは無関係に物体が存在していることを示すセンサ出力信号を出力する出力部9と、を備えている。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
車両検出装置
【課題】本発明は、画像から車両の情報を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】撮像手段4で撮像した画像から車両の情報を検出する車両検出装置1であって、車両の面の候補を推定する面候補推定手段11と、車両を撮像した画像から所定の特徴量を有する複数の特徴点を抽出する特徴点抽出手段12と、抽出した特徴点の3次元位置を推定する3次元位置推定手段13と、異なる時刻で撮像した各画像からそれぞれ推定された面候補の組み合わせ毎に、面候補間で複数の特徴点について特徴量の差が小さくなる特徴点の対応関係を探索し、当該探索された対応関係の複数の特徴点間において3次元位置を並進移動及び回転変換した上で位置誤差を求め、当該位置誤差が最少となる組み合わせの面候補を抽出し、当該抽出した組み合わせの面候補に基づいて車両の面を検出する車両情報検出手段14とを備えることを特徴とする。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 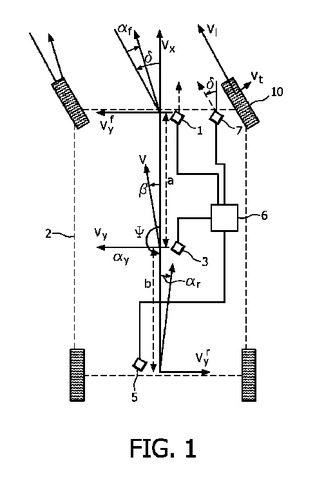 (もっと読む)
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
光学センサシステムにおいて光源を駆動する電流源
光学センサシステムにおいて光源を駆動する電流源回路が開示されている。電流源は、抵抗器に直列接続されたインダクタ、及びインダクタと抵抗器に対して並列結合されたダイオードを含む。電流源は、調整された直流(DC)電圧を受け、スイッチが閉じているときにインダクタを通じて電流を光源へ供給し、スイッチが開いているとき、インダクタを通じた電流をダイオードへ流すように構成されている。  (もっと読む)
(もっと読む)
車両渋滞検出装置
【課題】車両の渋滞の末尾位置を精度良く検出することが可能であり、光量の少ない環境でも渋滞を検出することが可能であり、さらに従来よりも短い時間毎の渋滞を検出することが出来る車両渋滞検出装置を提供することを目的とする。
【解決手段】車両渋滞検出装置が、所定の領域を走査するレーザレーダセンサと、レーザレーダセンサの検出結果に基づく距離情報と、レーザレーダセンサの走査方向の情報とからレーダ情報を生成し、レーダ情報から所定の領域内に存在する車両を検出し、進行方向側の車両から進行方向逆側の車両までを順番に渋滞車両であるか否か判定し、車両が渋滞車両であると判定した場合に当該車両の位置を渋滞末尾位置として指定することによって進行方向逆側末尾の渋滞車両の位置を渋滞末尾位置として最終的に指定する制御部を具備する。
(もっと読む)
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
レーザレーダ及びレーザレーダの運用方法
【課題】稼働状況に合わせた適切なメンテナンスを行うことが可能であるレーザレーダ及びレーザレーダの運用方法を提供する。
【解決手段】交差点Aに対してレーザ光LTを二次元的に走査し、このレーザ光LTの走査で得られる交差点A内における多数の計測点距離情報に基づいて、交差点Aの三次元情報を取得する検出部10と、検出部10で取得した三次元情報に基づいて、交差点A内に存在する車両Cを検出して出力する判定部20と、判定部20で取得したデータを蓄積可能なサーバSに対して公衆回線を用いて送信する公衆回線通信部30と、温度や湿度等の設置環境情報を収集する動作環境情報収集部40と、各構成部の稼働時間等の運用情報を収集する運用情報収集部50と、レーザレーダ1に対する外部からの操作履歴や発生したトラブル等の履歴情報を収集する履歴情報収集部60を備えている。
(もっと読む)
距離画像センサシステムおよび距離画像生成方法
【課題】簡易な構成でかつ正確に距離画像を生成する距離画像センサシステムおよび距離画像生成方法を提供する。
【解決手段】被写体までの距離を画素ごとに測定した距離画像を生成する距離画像センサシステムである。距離画像センサシステムは、複数の光源、発光制御手段、距離画像生成手段、および距離画像選択手段を備える。複数の光源は、それぞれ離間して配置されて発光する。発光制御手段は、複数の光源を順に切換えて発光させる。距離画像生成手段は、複数の光源それぞれの発光に対応して画像の撮像を行い、各画素が撮像された被写体までの距離に応じた画素値を有する距離画像を、複数の光源それぞれに対応して複数生成する。距離画像選択手段は、距離画像センサシステム複数の距離画像のうち、画像の撮像において受光量が最も多い画像を用いて生成された距離画像を選択する。
(もっと読む)
物体検出装置
【課題】物体の向きに適応した物体の輪郭検出を行うことにより物体の検出精度を高められる物体検出装置を提供すること。
【解決手段】物体の検出を行う物体検出装置であって、LIDAR2により物体の検出点pを検出し、物体の向きをカメラ3によって検出し、物体の向きに応じて輪郭検出用のテンプレートを選択し、そのテンプレートをLIDAR2により検出された検出点pの点列Pに当てはめて物体の輪郭を検出する。これにより、物体の向きに適応した形状のテンプレートを用いて物体の輪郭を検出することができるため、物体の輪郭を適切に検出して物体の検出精度を高めることができる。
(もっと読む)
81 - 100 / 331
[ Back to top ]