
Fターム[5J084AB01]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 車両 (331)
Fターム[5J084AB01]に分類される特許
101 - 120 / 331
シーン補間及び登録性能評価のための2D電子光学的画像及び3D点群データの融合
共通シーンの改善された可視化及び登録処理の成功裏の補間のための3D点群と2D画像を組み合わせる方法及びシステムについて開示している。結果として得られた融合データは、オリジナルの3D点群からの情報及び2D画像からの情報の組み合わせを有する。オリジナルの3D点群データは、カラーマップタグ化処理に従ってカラー符号化される。異なるセンサからのデータを融合することにより、結果として得られるシーンは、戦争空間認識、目標識別、レンダリングされたシーンにおける変化検出及び成功裏の登録の決定に関連する有用な複数の属性を有する。  (もっと読む)
(もっと読む)
物体認識装置
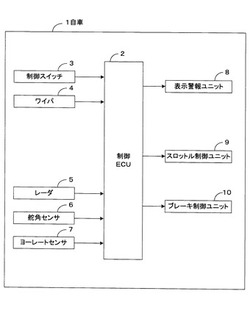
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
ビーム照射装置およびレーザレーダ

【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
レーダ装置
【課題】 先行車両のような障害物の向こう側に存在する先先行車のような物体についてもその位置等を正確に検出することを可能としたレーダ装置を提供する。
【解決手段】 物体に電磁波を照射し、その反射に基づいてその物体の位置を検出するレーダ(例えば、レーザレーダ1)の出力から距離・方位検出手段21により物体までの距離・方位を検出し、路面位置判定手段22で判定した路面位置に基づき、虚像物標判定・変換手段23は、判定した位置が路面より下に位置すると判定した場合には、路面に対して面対称な位置に変換した位置を物体の本来の位置とし、出力手段24により出力する。
(もっと読む)
レーザレーダ制御装置
【課題】レーザ光が人間の眼に与える影響をより小さくして安全性をより向上させることができるレーザレーダ制御装置を提供する。
【解決手段】自車両Cの車体表面の底部Bに設けられレーザ光Lを周囲に照射して反射光を検出する照射検出部10と、自車両Cの前方に存在する前方道路Rの勾配変化の有無を検出する勾配検出部20と、勾配検出部20によって勾配変化が検出された場合に、照射検出部10によって照射されるレーザ光Lの照射出力を抑制する出力制御部30と、を備える。前方道路Rの勾配変化が検出された場合に、レーザ光Lの照射出力が抑制されるため、前方道路Rが上り坂または下り坂になっているといったように勾配変化があってこの前方道路Rに人間Hが存在している状況では、レーザ光Lが人間Hの眼に与える影響をより小さくして安全性をより向上させることができる。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】従来システムは、目標が動く動的な状況となると移行条件が満たされないにもかかわらず、その後に測定値の補正又は新しい測定が行われる欠点がある。このような動的な状況でも使用できる光通過時間による距離測定方法を提供する。
【解決手段】光通過時間原理により距離を測定する光電センサ10であって、光信号を発光する発光部12、直反射又は拡散反射された受光信号を受光する受光部16、及び解析ユニット18を備えており、解析ユニットが、観察時点に光信号を発光するための発光遅延時間をシステマチックに選択することにより受光信号のための移行条件を満たし、必要な発光遅延時間から光通過時間を計算するように構成されている。さらに、コントローラが設けられており、観察時点に移行条件を満たしているように発光遅延時間を追跡するように構成されている。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像中の画素に対して、周囲の所定画素範囲の平均輝度値との比較により画素の輝度値を変更するステップS4〜S6の処理を備えた。
(もっと読む)
レーザレーダ用設置位置検証装置、レーザレーダ用設置位置の検証方法及びレーザレーダ用設置位置検証装置用プログラム
【課題】所定領域に向けてレーザを走査照射して所定領域に存在する物体を検知する3次元レーザレーダを設置するに先立って、レーザレーダの設置位置の検証を、安全、迅速、確実に行うことができる検証装置、検証方法及びプログラムを提案する。
【解決手段】レーザレーダ用設置位置検証装置100は、レーザレーダの設置候補位置Pに配置されると共にレーザレーダの画角と同一以上の画角を有して所定領域ARを含む画像を取得する撮像部110と、所定領域ARのうち設置候補位置Pからの最遠位置50Bと最近位置50Tのそれぞれにおいて撮像部110により撮像される矩形基準板120と、撮像部110により取得した検証用取得画像と矩形基準板120の形状情報に基づいて設置候補位置Pから最遠位置50Bまでの第一距離L1及び最近位置50Tまでの第二距離L2を求める距離演算部と、を備える。
(もっと読む)
距離測定装置
【課題】遠方の対象物を検知可能とし、且つ、同時に近傍の対象物を高分解能で検出可能な距離測定装置を提供する。
【解決手段】第1点滅周期で点滅して第1波長帯の第1光波を他の物体に向けて発光する第1光波照射手段と、第2点滅周期で点滅して第2波長帯の第2光波を他の物体に向けて発光する第2光波照射手段とを、含む発光手段と、第1波長帯の光のみを透過させる第1濾光手段と、第2波長帯の光のみを透過させる第2濾光手段とを、含む分光透過手段と、物体で反射して第1濾光手段を透過した第1透過光を受光し当該第1透過光の受光量に応じた第1受光信号を出力する第1受光手段と、物体で反射して第2濾光手段を透過した第2透過光を受光し当該第2透過光の受光量に応じた第2受光信号を出力する第2受光手段とを、含む感光手段と、第1受光信号および第2受光信号に基づいて物体までの距離を算出する距離算出手段とを備える、距離測定装置である。
(もっと読む)
距離計測装置および距離計測方法
【課題】観測領域に存在する物体までの距離を確実に計測することができる距離計測装置および距離計測方法を提供する。
【解決手段】車両前方の観測領域に対して投光器10から空間パタン光を照射して、この空間パタン光を照射した観測領域の画像をカメラ20で撮像する。このカメラ20の撮像画像を演算ユニット30に入力し、その撮像画像上の各ドットパタン光をデコードしてその照射方向を検知するとともに、各ドットパタン光の画像上の座標位置からその撮像方向を検知する。そして、カメラ20の撮像画像上の各ドットパタン光の照射方向と、各ドットパタン光の撮像方向と、投光器10とカメラ20との相対位置関係とに基づいて、三角測量の原理により、観測領域に存在する物体までの距離を計測する。
(もっと読む)
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
障害物検出方法及び装置
【課題】障害物が車両や列車等の物陰に隠れた場合であっても障害物を認識することができ、障害物の検出性能を向上させることができる障害物検出方法及び装置を提供する。
【解決手段】本発明の障害物検出方法は、レーザレーダ1によって所定の監視領域Kを走査し、レーザレーダ1により検知される距離情報と走査方向の情報とから3次元レーダ情報を求め、該3次元レーダ情報から監視領域K内に存在する物体Aを検知し、監視領域K内で一定時間以上継続して滞留している物体Aを障害物Aとして検出し、障害物Aとして検出された物体Aが監視領域K内で検知できなくなった時に、監視領域K内で他の物体Bが検知されている場合には、障害物Aは監視領域K内に滞留していると擬制する。
(もっと読む)
障害物位置検出装置
【課題】飛び出しが多い箇所を収集し、危険箇所として認識することができる障害物位置検出装置を提供する。
【解決手段】障害物位置検出装置は、レーザレーダ1で自車前方の障害物を検出した場合、自車位置周囲の所定の建造物(例えばコンビニエンスストア等の建築物)の設置情報をカーナビゲーションシステム11から取得する。障害物位置検出装置は、障害物の相対的な位置変化から障害物の危険度を算出し、障害物の位置、建造物の設置情報、危険度をそれぞれ対応付けて危険箇所データベース8に登録する。
(もっと読む)
障害物距離検出装置
【課題】各危険箇所がどの程度危険であるかを、低負荷でありながら正確にデータベース化することができる障害物距離検出装置を提供する。
【解決手段】障害物距離検出装置は、障害物との距離を順次記録する。当該障害物距離(D)が限界距離(L)より小さくなったとき、自車位置を記録して運転手に警報を発する。その後に運転手がブレーキを踏み、障害物距離(D)が限界距離(L)以上となった場合、記録している障害物距離の最小値を抽出する。抽出した最小値が限界距離(L)よりも小さければ、当該障害物距離の最小値とそのときの自車位置を示す情報を出力する。
(もっと読む)
光スキャン装置
【課題】指示した動きと実際の動きとの差を小さくして高精度な光走査を行うことができる光スキャン装置を提供すること。
【解決手段】レーザダイオードから出射されるレーザ光の方向をレンズが搭載された可動部を移動させることによって変化させる光スキャン装置において、レーザ光の走査を行うための往路の期間801で発生させる加速度の大きさよりも、レンズの位置を戻すための復路の期間802で発生させる加速度の大きさを大きくする。
(もっと読む)
車両用距離画像データ生成装置及び方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、反射光を撮像するイメージインテンシファイア7b及び高速度カメラ8と、撮像タイミングを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、低視程要因の距離画像データへの影響を抑制するステップS3,S4の処理を備えた。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、投光器5は、点灯個数を変更自在な複数の近赤外線LED5aを備え、タイミングコントローラ9は、ターゲット距離に基づいて、投光器5の近赤外線LED5aの点灯個数を変更させた。
(もっと読む)
物体検出装置、および光軸ずれ検出方法
【課題】前方に光を投光する投光部の光軸と、この投光部が投光した光の反射光を受光する受光部の光軸と、のずれを検出することによって、光軸合わせにかかる作業性を向上させることができる物体検出装置を提供する。
【解決手段】投光部3は、LD31と、投光レンズ33との間に、LD31が出射した光を投光レンズ33に導く光導波路を形成する投光側ライトガイド32を有している。投光側ライトガイド32は、投光レンズ33に対向する出射面の平面形状が外周部の外側に突出する突出面を有する形状である。また、受光部4は、PD41と、受光レンズ43との間に、この受光レンズ43を介して受光した光をPD41に導く光導波路を形成する受光側ライトガイド42を有している。受光側ライトガイド42は、受光レンズ43に対向する入射面の平面形状が、投光側ライトガイド32の出射面の平面形状と同じ形状である。
(もっと読む)
投光ユニット、および物体検出装置
【課題】長さ方向における光強度分布のばらつきを抑えた線状の光を投光することができる投光ユニットを提供する。
【解決手段】LD11が出射したレーザ光は、ライトガイド12に入射され、ライトガイド12内で屈折を繰り返し、出射面に伝搬する。ライトガイド12の出射面から出射されるレーザ光の形状は、横幅w×縦幅hの矩形形状である。また、ライトガイド12の出射面は、投光レンズ13の焦点距離fを半径とする曲面を横幅方向に形成しているので、投光レンズ13の光学中心から、ライトガイド12の出射面までの距離が、ライトガイド12の横幅方向において等しい。このため、投光レンズ13を通って前方に投光されるレーザ光は、横幅方向において、この投光レンズ13の収差の影響が抑えられる。したがって、長さ方向における光強度分布が略均一な、線状のレーザ光を投光することができる。
(もっと読む)
101 - 120 / 331
[ Back to top ]