
Fターム[5J084AB01]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 車両 (331)
Fターム[5J084AB01]に分類される特許
321 - 331 / 331
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 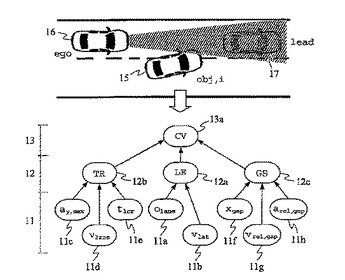 (もっと読む)
(もっと読む)
車両の周囲にある障害物の輪郭を検出するための方法およびコンピュータプログラム
【課題】本発明は、好ましくは車両の側方領域に組み込まれているセンサ手段(110)によって、走行する車両(200)の周囲にある障害物(300)の輪郭を検出する方法に関する。
【解決手段】発生された反射信号をまず数学的に平均化して、かくて得られた平均化された反射信号から、障害物の実際の位置および障害物の輪郭の実際の形状をより正確に導き出すことができる。 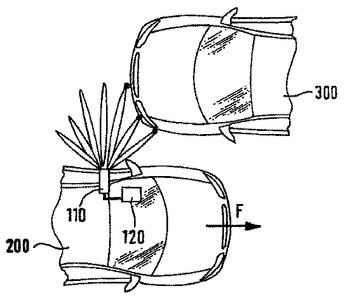 (もっと読む)
(もっと読む)
離れている2つの送信機および受信機を持つ周辺検出システム
本発明は、電磁波の2つの送信機および送信された電磁波の反射を受信するため適当に向けられる2つの受信機を備えた周辺検出システムに関し、第1の送信機が第1の受信機と共に、第1の目標領域に向けられ、第2の受信機が第2の受信機と共に、第2の目標領域に向けられている。第3の目標領域を検出するため、少なくとも第1の送信機の前に、この送信機から送信される電磁波の少なくとも一部を第3の目標領域へ少なくとも一時的に向ける光学手段が設けられ、少なくとも第2の受信機の前に、第1の送信機から第3の目標領域へ送られる電磁波の反射を少なくとも一時的に第2の受信機へ向ける光学手段が設けられていることが、提案される。光学手段は、なるべく常に設けられ、それぞれ1つの送信機のみが動作するので、それぞれ1つの受信機がそれぞれ妨げられることなく第3の目標領域を検出する。それにより、例えば自動車において、走行方向において車両の右側および左側に設けられる送−受信機対により、走行方向において全正面範囲が検出可能である。  (もっと読む)
(もっと読む)
レーザー周辺認識システム
潜在的脅威を検知するために目標位置の周辺区域をレーザー走査する方法は、周辺区域を横切ってパルス化レーザービームを走査し、パルス化レーザービームからのエコーを受信しそしてシーン画像を形成するために複数の周辺区域走査を形成することよりなる。加えて、目標位置の周辺区域において検知された潜在的脅威を認証する方法は、潜在的脅威を検知し、無線で潜在的脅威に質問し、所定の時間間隔内で応答が送信されない場合、又は受信された応答が適正なアクセスコードを備えていない場合は、潜在的脅威は認証されないと宣言する。 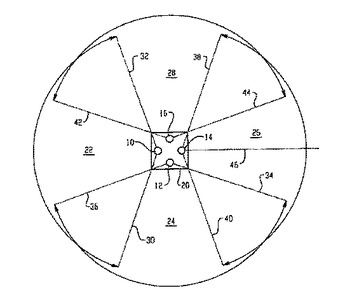 (もっと読む)
(もっと読む)
前方障害物検出機能付き携帯情報端末

【課題】 前方障害物を検知するために省電力設計された障害物検出センサを装備することにより、前方障害物を検知し、ユーザに報知することを可能にした携帯情報端末を提供する。
【解決手段】 障害物検出センサに加えて、振動センサを装備することにより、携帯情報端末が使用されている状況を検知し、その状況に応じて障害物センサを起動する。この障害物検出センサにより、端末のディスプレィを凝視しているユーザが注視していない前方障害物を検知し、報知することができる携帯情報端末ができる。また、振動センサに監視タイマーを設けることで、一定期間毎に振動センサを一時起動させる事により、省電力化がなされた。
(もっと読む)
車外監視装置

【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
変調光による距離測定装置
【課題】 拡散光によるトランスポンダ方式により、例えば圃場内や工場内などを移動する移動体の位置計測、または2台の移動体間の距離計測を高精度かつ低コストで行う。
【解決手段】 第1の周波数で変調された第1の変調光(80)を所定の角度範囲にわたって放射可能に配置された複数の発光ダイオード(33)を有する光送信部(68)と、第2の周波数で変調された第2の変調光を所定の角度範囲にわたって受信可能に配置された光受信部(70)とを備えた光送受信器(37)を具備する光トランスポンダ方式による距離測定装置。
(もっと読む)
距離計測装置及び物体検知装置
【課題】 被測定対象物体からの反射光束を確実に検出することができ、高精度な距離計測が可能となる距離計測装置及び物体検知装置を提供すること。
【解決手段】 投光光学系11は、光源12と、光強度補正手段としての投光レンズ(コリメートレンズ)13とを有している。光源12は、レーザダイオード駆動回路(LD駆動回路)33から入力された駆動信号に対応して、光束を出力するレーザダイオード(LD)である。投光レンズ13は、LD12から出力された光束を被測定対象物体Tに向けて出射すると共に、LD12から出力された光束の光強度分布を補正するためのものであり、投光レンズ13から所定の距離離れた位置においてLD12から出力された光束の光軸付近の光強度よりも光束の周辺部の光強度が高くなるように、光束の光強度分布を補正する。投光レンズ13は、非球面レンズ部分とシリンドリカルレンズ部分とを含んでいる。
(もっと読む)
車両用表示装置
【課題】 視認性の良くない走行環境において前方に存在する障害物を、ドライバが容易に認識させる。
【解決手段】 表示制御装置は、ライトスイッチがオン状態のときには前方視界が良くないと判断できるので、前方障害物センサによる障害物の検出結果と、予め設定された赤外線カメラと当該前方障害物センサとの車両上の配置関係に関する情報とに基づいて、その障害物に相当する部分画像を、当該赤外線カメラによって撮影された赤外画像の中から抽出し、抽出した部分画像を、地図画像情報に基づいて生成した現在位置前方の立体的な地図画像の対応位置に重ね合わせた状態で、表示器に表示する(S1-S2)。
(もっと読む)
標識設置方法
【課題】 車両の前方を監視するセンサの取付角度を調整する基準点をなす標識を設置する標識設置方法において、センサを車両に取付る角度の調整が、その前方に広大な空間を必要とすることなく、狭い空間であっても簡易かつ正確に実施できる標識設置によるセンサの取付角度調整方法を実現することを課題とする。
【解決手段】 紐23の一端をトランクカバー12に固定し、トランクカバー12を開いた状態で、紐23を車両10に付された基準点上を通過するように車両前方に延ばし、車両前方に延ばされた紐23を基準にして標識21を設置することを特徴とする。
(もっと読む)
回帰反射形の安全及び正常確認装置
【課題】 人体や物体が存在していないことの確認だけでなく,装置の正常確認も同時に行うレーザー式安全装置を提供する。
【解決手段】 レーザー光の走査領域を人体や物体が存在していないことを確認するための安全確認領域14と,レーザー光による走査が安全確認領域の全域に及んでいることを確認するための正常確認領域13と,安全及び正常確認を行えない未確認領域12に分割する。安全確認領域と正常確認領域には,回帰反射体17,18を所定の幅,個数又は設置間隔で設けた反射板15,16を備える。安全確認領域の反射板に設けた回帰反射体の幅,個数又は設置間隔と,正常確認領域の反射板に設けた回帰反射体の幅,個数又は設置間隔を異なるものとする。電気信号のパターンが所定の正常パターンと一致する場合は運転許可信号を出力する。
(もっと読む)
321 - 331 / 331
[ Back to top ]