
Fターム[5J084AB01]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 車両 (331)
Fターム[5J084AB01]に分類される特許
121 - 140 / 331
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供すること。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、ターゲット距離の異なる複数の撮像画像それぞれに対して輝度と頻度から物体以外のデータを距離画像データの生成から除外するステップS4〜S6の処理を備えた。
(もっと読む)
車両の検出方法及び装置

【課題】検知エリア内の車両を確実に追尾することができる車両の検出方法及び装置を提供する。
【解決手段】本発明に係る車両の検出方法は、検知エリアSの入口に初期検知エリアPを設定し、レーザ光Lの第n次走査結果(nは1以上の整数)から初期検知エリアPに存在する車両1を追尾対象車両1xと設定するとともに追尾対象車両1xの初期位置を把握し、初期位置から追尾サーチエリアCを設定し、レーザ光Lの第n+1次走査結果から追尾サーチエリアCに含まれる車両1cを追尾対象車両1xと同一車両であると判断する。
(もっと読む)
車両の障害物警報装置
【課題】 ドライバーが前方横断物に対して自車両を安全に運転するために有益な障害物情報を状況に合致した的確なかたちでドライバーに提供することを課題とする。
【解決手段】 レーザレーダ11で検出した車両前方に存在する障害物の移動方向を検出し、その検出結果に基づいて自車の進行方向の前方を横切る動きをすると判断した障害物を、ディスプレイ13に視覚的に表示する電子制御ユニット10を備える。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
物体検出装置
【課題】停止車両を、路面標示や路面に埋め込まれた反射物等の路面設置物と、区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、水平方向、および垂直方向にレーザ光を走査し、自車両前方に存在する物体を検出する。また、制御部2は、検出物体について、(a)停止物体である、(b)自車両からの距離が予め定めた路面設置物判定距離D1よりも短い、(c)前回の下走査で得られた反射波の強度が、前回の上走査で得られた反射波の強度の路面設置物判定係数倍(×α1)よりも大きい、および、(d)前回の下走査で得られた反射波の強度が、今回の基準走査で得られた反射波の強度よりも大きい、という、4つの条件が全て成立したときに、その検出物体を自車両の走行を妨げない路面設置物であると判定する。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
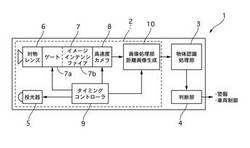
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
先行車認識装置及び先行車認識方法
【課題】先行車の認識精度を確保しつつ、物体状況に応じ安定して先行車を認識する。
【解決手段】送信し物体からの反射波を受信して物体認識の情報を習得する。取得した物体認識の情報に基づく形状的特徴が、車両の形状的特徴に合致するか否かで先行車か否かを判定する。そして、先行車が存在すると判定する度に、積算カウンタに所定のカウンタ値を加算し、積算カウンタの値が所定値以上となると先行車と認識する。カウンタ積算手段で加算するカウンタ値を、先行車との判定の確からしさが高いほど大きな値とする。
(もっと読む)
三次元測距装置
【課題】180度以上の走査角度を確保しながらも、小型で高精度な三次元測距装置を提供する。
【解決手段】水平面に対して傾斜配置された偏向ミラー9を垂直な軸心P1周りに回転する走査機構と、軸心周りに配置され軸心に対して所定角度θ傾斜した光軸L1に沿って測定光を出射する投光部3と、投光部から出射され偏向ミラーで偏向反射された測定光に対する反射光を集光する集光光学系6と、集光された反射光を検出する単一の受光部5と、軸心P1の周方向に沿って互いに異なる位置から異なるタイミングで一つの測定光が出射されるように投光部を駆動する駆動制御部と、走査機構により投光部から測定対象空間に向けて走査された測定光に対する反射光の遅延時間から被測定物までの距離を算出するとともに、走査機構から出射される測定光の走査角度から前記被測定物の角度を算出する距離算出部を備えている。
(もっと読む)
車両用物体検知装置
【課題】外界情報を予め取得しておくことなしに電磁波の反射率が低い他車などの物体を検知するようにした車両用物体検知装置を提供する。
【解決手段】自車(車両)の周辺に電磁波を送信すると共に、物体に反射させて得た反射信号を受信するレーダとレーダ出力処理ECUからなる電磁波送受信手段を備えると共に、電磁波送受信手段の受信結果に基づいて物体の種別を判定し(S10,S12)と、物体が車両(他車)のディスクホイールWnと判定された場合、判定されたディスクホイールWnに基づいて車両の前後方向長さ、より具体的には車両形状推定値mgn1_1,2,3; mgn1_1,2',3; mgn1_1”,2”,3”を推定する(S14からS32)。
(もっと読む)
検出装置
【課題】簡素で、外乱を受けにくく、可能な限り長寿命を確保できる構造を採用し、広い角度範囲(最大360度まで)に渡って監視領域の物体を確実に検出できる検出装置を提供する。
【解決手段】監視領域11の物体を位置分解的に検出する検出装置は、送信領域19に電磁波を出射する送信装置15と、受信領域23から反射された電磁波を受信する受信装置21とを備え、前記送信領域19及び受信領域23は前記監視領域11において一定の検出角度をカバーする検出領域27の内部で互いに重畳又は交差し、該検出領域27で出射波17が前記物体により反射され、更に、前記出射波17の伝播経路及び/又は反射波25の伝播経路に設置され、どの時点においても前記検出領域27全体を送信側及び/又は受信側でカバーする結像系29と、前記反射波25をその反射位置に関して識別するための位置分解手段31とを備える。
(もっと読む)
電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の方法
電磁波及び/又は弾性波にさらされたオブジェクトを、感知信号(特にノイズの多い弱信号)に基づく有用な三次元情報の識別によって、合成的に再構成する方法である。この方法は、判定基準(2)、(3)、(4)、(6)、(7)、及びグリッド(5)を、知識ベース(1)から抽出するステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)と、判定基準(2)によってフィルタリングされた感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、判定基準(3)によってフィルタリングされた弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、問題の弱信号(10)からノイズを除去して増幅し(B3)、有用な弱信号(11)を取得するステップと、判定基準(4)によってフィルタリングされた有用な弱信号(11)から、有用な直接情報(12)を識別し(C)、最適な判定基準(2’)及び(3’)を与えるステップと、グリッド(5)によってフィルタリングされた有用な直接情報(12)を使用して、問題の情報(13)を再構成し(D1)、最適なグリッド(5’)を与えるステップと、判定基準(6)によってフィルタリングされた問題の情報(13)を使用して、有用な情報(14)を再構成し(D2)、最適な判定基準(6’)を与えるステップと、判定基準(7)によってフィルタリングされた有用な情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し、認識状態ファイル(16)を与え、最適な判定基準(7’)を与えるステップと、知識ベース(1)において、判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を、最適な判定基準(2’)、(3’)、(6’)、(7’)、及び最適なグリッド(5’)で更新する(E1)、(E2)、(E31)、(E32)、(E4)か、又は判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を変更するステップと、を含む。この方法は、工業、医療、保安、及び防衛におけるリスク管理及びパフォーマンス管理用に問題のオブジェクトを識別する目的で設計されたものである。 (もっと読む)
移動物体検出装置
【課題】移動物体を高精度に検出する移動物体検出装置を提供することを課題とする。
【解決手段】道路上の移動物体を検出する移動物体検出装置1であって、移動物体の位置を検出する移動物体検出手段10,31と、道路上での移動物体の移動範囲を限定する移動範囲限定手段41と、移動範囲限定手段41によって限定された移動範囲内において、移動物体検出手段10,31によって所定時間間隔でそれぞれ検出された各位置についての対応付けを行う対応付け手段51とを備えることを特徴とする。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 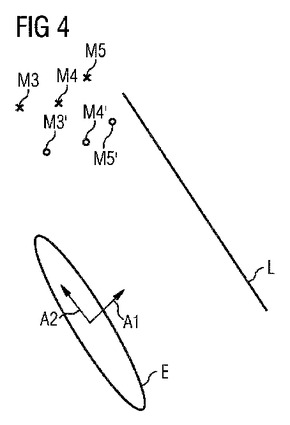 (もっと読む)
(もっと読む)
光位相差検出式の物体検知センサ
【課題】受光素子に受光される光が過小もしくは過大である場合でも、正確に物体の有無を検知することができる光位相差検出式の物体検知センサを提供する。
【解決手段】第1の周期ごとに受光信号71c〜77cの振幅を測定すると共に、第2の周期ごとに上記振幅に関する平均値AA1〜AA7を算出する振幅平均値算出手段18aと、第1の周期ごとに投光信号50b〜57bと受光信号70b〜77bとの位相差を測定すると共に、第3の周期ごとに上記位相差に関する平均値PA1〜PA7を算出する位相差平均値算出手段18bと、振幅平均値AA1〜AA7と振幅参照値AR1〜AR7との差が第1の範囲外にある場合と、そうでない場合であって位相差平均値PA1〜PA7と位相差参照値PR1〜PR7との差が第2の範囲外にある場合とにおいて、検知領域内に物体が有ると判定する判定手段18eと、を含むようにした。
(もっと読む)
121 - 140 / 331
[ Back to top ]