
Fターム[5J084AB01]の内容
光レーダ方式及びその細部 (24,468) | 測定対象 (1,031) | 車両 (331)
Fターム[5J084AB01]に分類される特許
41 - 60 / 331
距離測定装置および距離測定方法
【課題】光ビームを測定対象物に照射して測定対象物までの距離を測定する距離測定装置および距離測定方法において、光ビームの照射ができない範囲が無く、従来に比べて捜査範囲を広くする。
【解決手段】光ビームを測定対象物に照射して測定対象物までの距離を測定するとき、距離測定装置は、向きの異なる複数の光ビームのそれぞれをビーム出射部から出射する。このとき、距離測定装置は、反射面上に沿って回転軸を持ち、前記回転軸の周りに軸回転する1つまたは複数の反射ミラーの反射面上の前記回転軸の位置で前記複数の光ビームを反射させることにより、測定対象物に前記光ビームのそれぞれを照射させる。距離測定装置は、前記光ビームの照射により測定対象物で反射して戻ってきた反射ビームを前記反射ミラーで反射させて受光し、受光した前記反射ビームを用いて、測定対象物までの距離情報を求める。
(もっと読む)
レーダ装置

【課題】車幅方向中心から離れた位置に設置するレーダ装置において、レーダ装置の設置位置が基準設置位置からズレたか否かを検出すること。
【解決手段】レーダ装置は、自車両の前部において、自車両の車幅方向中心から離れ、かつ、規定角度範囲の中心軸が自車両の車幅方向の中心軸と自車両の前方にて交差するように、検知基準軸と設置基準軸との関係が規定された基準設置位置に固定して使用される。そのレーダ装置では、物体検知処理を実行する(S110)ことで生成した検知データの中から、抽出条件に合致する対象検知データを特定する(S120〜S200)。そして、複数の対象検知データによって表される水平確定位置を水平基準データに照合した結果が、判定基準値Thd未満であれば(S230:NO)、検知基準軸にズレが生じているものと判定して、ズレ対応処理を実行する(S240)。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
車両用物体判定装置
【課題】自車20が旋回するときにも連続路側物を的確に検出する。
【解決手段】車両用物体判定装置10では、物体検出部13が、レーザ光の走査により前方物体情報を取得するとともに、進行軌跡予測部14は、旋回角センサ11からのヨーレート等や車速センサ12からの車速に基づき旋回進行軌跡32を算出する。物体判定部15は、自車20が直進中か旋回中かを判断して、旋回中は、旋回進行軌跡32に対して左右別々に判定エリア33L,33Rを設定する。そして、同一の判定エリアに存在する物体同士に限定して、それらが同一の連続路側物列の物体であるか否かの判定対象とする。具体的には、判定エリア33R内の物体をy座標位置を小さい順に番号付けし、番号が隣り同士の物体間のy軸方向距離を算出し、その平均値Baを算出し、Baと物体間のy軸方向距離との対比に基づき、各検出物体に対して連続路側物であるか否かを判定する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】受光領域は、平面形状が第1方向で対向する一対の長辺と第2方向で対向する一対の短辺とを有する長方形状である。第1及び第2半導体領域FD1,FD2は、各長辺に沿って互いに空間的に離間して配置される。第1及び第2ゲート電極TX1,TX2は、対応する半導体領域FD1,FD2と受光領域との間に配置される。第1及び第2ポテンシャル調整電極EL1,EL2は、受光領域における第1及び第2ゲート電極TX1,TX2の間に位置する領域に重複するように配置されている。第1及び第2ポテンシャル調整電極EL1には、第1及び第2ゲート電極TX1に与えられる電荷転送信号と同じ位相であり且つ電位が低いポテンシャル調整信号が与えられる。
(もっと読む)
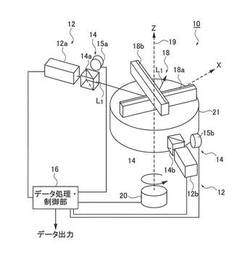
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置において、光源の寿命を低下させることなく、レーンマークおよび前方障害物を精度良く検出する。
【解決手段】レーザレーダ装置は、光ビームを発生させる光源と、前記光ビームを偏向させて、車両の進行方向を中心として前記車両の車幅方向に対して設けられた第1の走査角度範囲において走査する第1光走査部と、前記光ビームを偏向させて、前記車幅方向に対して左右に分割されている第2の走査角度範囲において走査する第2光走査部と、前記第1の走査角度範囲内に存在する障害物によって反射された前記光ビームの反射光を受光して、前記障害物を検出する障害物検出部と、前記第2の走査角度範囲内に存在するレーンマークによって反射された前記光ビームの反射光を受光して、前記レーンマークを検出するレーンマーク検出部と、を備える。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから迅速に対象物体の種別を推定し、また、障害物の大きさや移動の向きを把握できるようにする。
【解決手段】矩形推定部6により、レーザレーダ2に対する対象物体の移動により変化する検出パターンが対象物体の横方向の長さおよび縦方向の長さのいずれであるかを推定し、物体属性推定部7により、推定した前記幅および前記長さの少なくともいずれか一方から、1フレームの検出パターンからでも迅速に対象物体の種別を推定し、対象物体の全体の大きさや移動の向きを知ることもできるようにする。
(もっと読む)
物体検知システム及び方法
【課題】レーザセンサから照射されるレーザビームが障害物に遮断されて物体が一時的に未検知となっても、連続性を以て同一の物体を特定する。
【解決手段】監視領域にて物体の探索をする探索空間、及び物体を検索する所定の単位のマス目からなる検索グリッドの数を物体毎に設定しておき、得られる測距データから監視領域内に存在する物体を経時的に測距する。障害物によりレーザビームが遮断されて、物体が一時的に未検知となった場合、探索空間にレーザビームを照射して物体を経時的に探索する。探索による物体の探索の対応を経時的に取りながら物体の位置の検索及び追跡し、この追跡により得られるデータを用いて、物体の軌跡を表示する。
(もっと読む)
車両感知器
【課題】併設される際の干渉を防止するともに、ハードウェア構成を共通とした車両感知器の実現。
【解決手段】車両感知器100は、位相差方式の光波距離センサである距離センサ10を内蔵し、この距離センサ10による計測距離Lに基づいて、車両の有無を判定する。距離センサ10では、分周器14の分周比Nを変更することで、送信波の周波数を変更できるとともに、2位相ロックインアンプ30によって、受信信号から、送信波の周波数と同じ反射波の信号のみを抽出することができる。
(もっと読む)
移動物予測装置及びプログラム
【課題】移動物の将来の位置分布形状が複雑な形状であっても、計算量の増大を抑制することができるようにする。
【解決手段】領域分割部42によって、走路区分の領域及び静止物の領域に応じて領域を分割した領域分割マップを生成する。分岐ノード生成部44によって、領域境界上に分岐ノードを生成する。移動物生成部46によって、移動物の位置分布を、速度分布と共に記録する。領域分割マップにおいて移動物の位置分布に近傍に分岐ノードが存在する場合、移動物分割部52によって、分岐ノードの分岐すべき方向の数だけ、移動物の位置分布を生成すると共に、分岐ノードが存在する境界で隣接する領域の進入可能性に基づいて、各分岐すべき方向の分岐割合を算出し、移動物の位置分布に対して、分岐割合に応じた重み付けを行うと共に、対応する速度分布の各々を、各分岐すべき方向に応じて変更する。位置更新部48によって、移動物の位置分布を更新する。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置による測定情報を利用して、測定光の伝播方向と交差する方向に移動する移動体の速度を正確に算出することができる信号処理装置を提供する。
【解決手段】信号処理装置は、測定対象空間に向けて所定の走査周期Tで測定光を走査する走査式測距装置1から入力される単位走査毎の測定情報を記憶する記憶部と、記憶部に記憶された過去と現在の単位走査毎の測定情報を走査方向に相対的にシフトさせたときに、双方の測定情報の一致度が最大となるシフト量Sと走査周期とTから移動体の速度を算出する速度演算部と、速度演算部で算出された速度に基づいて前記移動体の状態情報を出力する出力部と、を備えている。
(もっと読む)
距離測定装置、距離測定方法、および距離測定プログラム
【課題】物体までの距離を測定する距離測定装置において、簡素な構成で距離と輝度とを検出できる技術を提供する。
【解決手段】レーダ装置は、レーザ光を射出する発光部と、発光部からのレーザ光が物体に反射されることにより得られる反射光を受光し、この光量に応じた出力をする受光部と、を備えている。そして、レーダ装置は、レーダ処理にて、受光部による出力に基づいてレーザ光を反射した物体までの距離を演算し(S220)、また、受光部による出力に基づいて輝度を演算する(S230)。このレーダ装置によれば、物体までの距離だけでなく、受光部が受光することができる領域における輝度についても、レーダ装置の構成(ハードウェア)を利用して検出することができる。よって、簡素な構成で距離と輝度とを検出することができる。
(もっと読む)
受信回路、及びレーザレーダ装置
【課題】加算処理によって生じるSN比の低下を防ぐことができ、より適切にSN比の改善を図ることができる受信回路、及びレーザレーダ装置を提供する。
【解決手段】比較器4A,4Bは、それぞれ増幅器2A,2Bから出力される信号振幅の変動状況を監視している。比較器4A,4Bは、閾値電圧と、増幅器2A,2Bから出力された信号の電圧とを比較する。比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも高い場合には、HIGHレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に繋ぐ。他方、比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも低い場合には、LOWレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に分離する。
(もっと読む)
物体認識装置、及びプログラム
【課題】物体認識装置において、複数個の検出対象が走査方向に沿って近接している場合であっても、各検出対象の認識精度を向上させること
【解決手段】物体認識処理では、測距データ間の差が予め規定された許容値以下となる測距データによって形成される領域に含まれる測距データ群を、一つの候補領域をグループ化する(S130)。当該候補領域の大きさが規定値より大きければ(S150:YES)、当該候補領域を特別候補領域として、この特別候補領域に対応する画像データ上の対象領域に対して画像認識処理を実行し、対象領域中の検出対象の範囲を特定する(S170)。その特定した範囲に基づく検出対象の境界方位に従って、特別候補領域を分割し(S210)、その分割した新たな候補領域を含む全ての候補領域について追跡処理を実行して、候補領域の中で物体として確定すべきものと特定する(S230)。
(もっと読む)
物体認識装置
【課題】二次元走査タイプの物体認識技術において、送信波の反射によって得られる路面の検出結果(測距データ)が、路面からの反射なのか否かを判定できる物体認識装置を提供する。
【解決手段】測距データを一体化して物標データを生成する際に用いる探索領域内に別レイヤの測距データが存在しないという条件1が成立すれば、非立体物からの測距データであると判定する。測距データを、横軸を距離、縦軸を度数として所定の距離範囲毎のデータ数を表した距離ヒストグラムと、横軸を反射強度として同様に表した反射強度ヒストグラムを考える。「路面反射による測距データであれば発生するであろう度数の閾値」を設定し、距離ヒストグラム、反射強度ヒストグラムのいずれにおいても閾値を超える度数があるという条件2が成立すれば、路面からの測距データである可能性が高い。条件1、条件2が両方成立する場合に、路面からの測距データであるとして、削除する。
(もっと読む)
周辺物体検出装置
【課題】周辺物体の手前にレーザ光を遮る遮蔽物があるか無いかに拘わらず、周辺物体の移動量や移動速度を正確に検出することができる周辺物体検出装置を提供する。
【解決手段】周辺物体検出装置は、まず複数のレーザレーダにより今回計測された周辺物体の位置データ(レーザ計測点)を入力し、現フレームのグルーピング点群データを求める。続いて、前フレームのグルーピング点群データをメモリから取得し、周辺物体に前フレームでの隠れ領域があるかどうかを判断する。前フレームでの隠れ領域があるときは、現フレームの各レーザ計測点のうち当該隠れ領域に含まれるレーザ計測点をグルーピング点群から除去し、ICPトラッキングを用いて現フレームのグルーピング点群データに含まれる各レーザ計測点を前フレームのグルーピング点群データに含まれる各レーザ計測点に合わせ込み、その結果に基づいて周辺物体の移動量及び移動速度を求める。
(もっと読む)
車両の周辺監視装置
【課題】物体位置特定手段と撮像手段とにおける光軸ずれ量を算出する手段を提供。
【解決手段】レーザレーダ10と、車両の周辺の画像を撮像する撮像手段12と、画像処理ユニット14から構成される。物体位置特定手段141は、レーザレーダ10からの信号により物体の位置を特定する。画像取得手段142は、赤外線カメラ12が撮影した画像をグレースケール画像として取得する。画像上の物体特定手段143は、物体位置特定手段141が特定した物体位置に対応する物体を、グレースケール上で特定する。
この情報に基づいて、光軸ずれを算出する。
(もっと読む)
41 - 60 / 331
[ Back to top ]