
Fターム[5J084AD01]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 時間測定 (774)
Fターム[5J084AD01]に分類される特許
61 - 80 / 774
目標検出装置、目標検出方法、目標検出プログラム
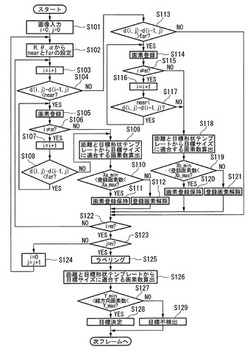
【課題】処理に負担がかからず、目標を確実に検出できるようにした目標検出装置を提供する。
【解決手段】LADARセンサ101は、画素毎に距離情報を取得する。LADARセンサ101から取得された隣接画素の距離差を演算し、隣接画素間の距離が急激に変化している部分を検出して物体を判定する。この判定された物体と、目標形状テンプレートとを比較して、目標物体の検出を行う。目標形状テンプレートは実寸の情報であり、LADARセンサ101からの距離情報を基に、目標形状テンプレートの実寸の情報を画素数の情報に換算し、判定された物体の画素数と、換算された目標形状テンプレートの画素数とを比較して目標物体の検出を行う。
(もっと読む)
車両用物体検出装置

【課題】電磁波を用いて物体を検出する場合、樹木などの低反射物体が自車の進行方向に対して横方向から移動したと誤判断することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向(X軸方向)の物体を検出し(S10)、検出された物体が複数あるとき、複数の物体をグルーピングして物体群と認識し(S12)、認識された物体群内の物体同士の距離の合計値σpxが第1の所定値Lpxを超えるか否か判定し(S18)、時刻tから時刻t-nまでの間における1ステップごとの物体群のX軸方向の位置の差の合計値σpが第2の所定値Lpを超えるか否か判定し(S22)、1ステップごとの物体群のY軸方向の幅の合計値σwが第3の所定値Lwを超えるか否か判定し(S26)、少なくとも2つの判定結果が肯定されるとき(S30)、物体群が静止状態にあると判定する(S32)。
(もっと読む)
レーザレーダ装置及びレーザレーダ法
【課題】三次元レーザレーダ装置及び方法において、海面位置に関わらず、確実に検知対象物を検知可能とする。
【解決手段】鉛直方向に連続して配列される複数の点データからなる連続点データ群のうち高さ距離が海上に発生する波の想定最大値を上限として設定される除外閾値以下の連続点データ群に含まれる点データを除外して検知対象物の検知を行う。
(もっと読む)
窃盗防止装置並びに不正な干渉及び侵入の認識方法
【課題】販売員の防護領域への進入、退出並びに通常の店舗業務を許可する一方、窃盗を阻止する。
【解決手段】通路領域106以外の箇所で干渉又は乗り越えが可能であるような仕切り102により囲まれた防護領域104、特にレジの領域又は販売領域への不正な干渉又は侵入を認識するための窃盗防止装置108、110であって、該装置108、110はレーザスキャナ108を含み、該レーザスキャナ108は、その監視平面114により仕切り102越しの干渉及び乗り越えが認識されるようにその配置及び方向が決められ、その干渉又は乗り越えの認識に基づいて窃盗信号を出力する、という構成の装置において、通路領域106のための認証ユニット110を備え、該認証ユニット110は、通路領域106において正当に認められた通行があった場合にレーザスキャナ108を動作状態又は停止状態にするように構成されている。
(もっと読む)
人体検知センサ及び自動水栓
【課題】誤検知を抑制して検知性能を高めた人体検知センサを提供すること。
【解決手段】発光部25が投射する光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、受光エリア内の反射光の重心位置を特定する重心特定手段322と、重心位置が検知エリアに属しているか否かを判定する第1の判定手段323Aと、重心画素の画素値に関する閾値処理の結果に応じて重心画素の受光度合いの適否を判定する第2の判定手段323Bと、第1及び第2の判定手段323A・Bがいずれも肯定的な判定を行ったときに被検知対象を検知した旨を表す検知信号を出力する検知出力手段324と、を備えている。
(もっと読む)
マクロパーティクルの計測方法と装置、表面処理方法と装置、および前記表面処理方法を用いて製造された製品
【課題】光っているマクロパーティクルのみならず、光っていないマクロパーティクルについても計測すること、さらにマクロパーティクルの速度分布のみならず、マクロパーティクルの粒度分布や帯電状態(正・負・中性)を計測する。
【解決手段】マクロパーティクルが通過可能な孔を有する電極をマクロパーティクルの移動方向と垂直に配置して、1つ以上の無電界空間および電界空間を形成させ、マクロパーティクルに外部光源より光を照射して粒径を計測すると共に、マクロパーティクルが無電界空間および電界空間内において所定距離を移動するために要した時間を計測し、それに基づいてマクロパーティクルの無電界空間内における速度および電界空間内における速度変化を求め、粒径に基づいて、前記マクロパーティクルの粒度分布を計測すると共に、速度および速度変化に基づいて、マクロパーティクルの速度分布および帯電状態を計測する。
(もっと読む)
レーザレーダの光軸検査方法及び検査システム
【課題】簡易な手法によって視認性よく合否を判定することが可能な検査システム等を提供する。
【解決手段】検査システム1は、自動車AMに取り付けられたレーザ装置5の基準光軸に関する検査を行うためのシステムであって、自動車AMの位置を検出する車両検出部41と、自動車AMの基準設置軸上において対象物TGの位置を調整する対象物調整部30とを備える。検査システム1では、光軸検査工程において、制御装置が、車両検出部41から入力された検出データに基づく演算値を対象物調整部30に出力することで、自動車AMに対して所定の検査距離に対象物TGを配置する。そして、レーザ装置5に、カメラ軸がレーザ装置5の基準光軸と一致するように検査用カメラ20を取り付け、その撮像画像内の中心領域に対象物TGが位置する場合に、レーザ装置5の基準光軸と自動車AMの基準設置軸とが一致することになるので、検査合格とするようにした。
(もっと読む)
距離測定方法および距離測定装置
【課題】簡易な構成で、物標までの距離の測定精度を向上可能な距離測定方法および距離測定装置を提供する。
【解決手段】発光トリガ信号をきっかけに発光部から照射されたレーザ光の物標からの反射光を受光する受光部は、発光部からレーザ光が照射されるタイミングで、出力する電気信号に変動が生じるように構成されている。制御部では、測定部からトリガ信号が出力されてから、測定部にて検出される電気信号に最初に生じる電気信号の変動を第1変動信号、二番目に生じる変動を第2変動信号、第1変動信号が生じるまでの期間を第1期間、第2変動信号が生じるまでの期間を第2期間として、第1期間および第2期間の差を第1の距離測定時間として測定する(S110−S175)。続いて、第1の距離測定時間と予め定められた距離係数とを乗算した値を物標までの距離として算出する(S180)。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
移動体追跡装置及び移動体追跡方法
【課題】 移動体と特徴量とを適切に対応付ける確率を高め、移動体を追跡できる確率を高める。
【解決手段】 移動体追跡装置は、観測領域内に移動体が存在するか否かを計測する計測装置12と、計測装置で計測された計測結果から特徴量を抽出する特徴量抽出部16と、抽出された特徴量と当該仮説内の移動体とを対応付けることで複数の新たな仮説を確率的に作成する対応付け部17と、対応付け部により作成された新たな仮説のそれぞれについて、当該新たな仮説内の移動体について追跡する移動体追跡部22を有している。計測装置12による計測、特徴量抽出部16による処理、対応付け部17による処理、移動体追跡部16による処理を所定の周期で繰り返すことで、観測領域内を移動する移動体を追跡する。
(もっと読む)
距離測定装置
【課題】複数視野を同時に測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定光を射出するレーザ光源と、測定対象物からの反射光を検出する光検出器と、第1の反射鏡、第1の反射鏡の周囲に配置された第1の保持枠、第1の反射鏡を第1の保持枠に対し垂直軸の周りに回転可能に軸支する第1の支持梁、第1の保持枠の下部表面に配置された第2の反射鏡、第1の保持枠の上部表面に配置された第3の反射鏡、第1の保持枠の周囲に配置された第2の保持枠、及び第1の保持枠を第2の保持枠に対し水平軸の周りに回転可能に軸支する第2の支持梁を備えた光走査装置と、レーザ光源から射出された測定光を光走査装置に導光すると共に光走査装置で受光された反射光を光検出器に導光する導光光学系と、レーザ光源及び光走査装置の各々を駆動制御すると共に光検出器の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。
(もっと読む)
レーザセンサ装置
【課題】高速で三次元領域での測定を可能とし、さらに迷光による測定精度の悪化を防止する。
【解決手段】ポリゴンミラー3を収容する収容ケースの内部をレーザ投光器からポリゴンミラー3の反射面に至る第1空間とポリゴンミラー3の反射面から受光器に至る第2空間とに分割する遮光部と、ポリゴンミラー3を回転させることによって測定用レーザ光を第1方向に走査する第1走査部4と、ポリゴンミラー3を第1走査部4による回転の中心軸に対して交差する中心軸を中心として回動させることによって測定用レーザ光を第1方向と交差する第2方向に走査する第2走査部5とを備える。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
人体検知センサ及び自動水栓
【課題】検知性能と省エネルギー性能とを両立した人体検知センサを提供すること。
【解決手段】発光部25が投射した光に応じて生じた反射光を撮像部26で受光して被検知対象を検知する人体検知センサ1は、発光部25による発光動作、及び撮像部26による受光動作を制御する撮像制御手段311と、反射光を受光したラインセンサ261の特定の画素の受光量の時間的な変化量が所定の閾値以上であるか否かを判定する第1の判定手段321と、第1の判定手段321が肯定的に判定したときに、ラインセンサ261に対する反射光の入射位置に応じて被検知対象の有無を判定する第2の判定手段322と、を備えている。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検知する場合、反射強度の弱い、自車の進行方向に対して横長の壁などの物体が自車の進行方向に対して横方向から移動したと誤検知することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向に電磁波を送信し、進行方向に存在する物体に反射させて得た反射点に基づいて物体を経時的に検知する車両用物体検出装置において、反射点を2次元平面に投影して得た点群を検出し(S10)、検出された点群の重心位置を算出し(S10)、算出された重心位置が進行方向に対して横方向に移動すると共に、横方向の検知幅が変化しているか否か判定し(S14,S16,S20,S22,S28)、算出された重心位置が横方向に移動すると共に、横方向の検知幅が変化しているとき、物体は横方向に移動していないと判定する(S24)。
(もっと読む)
61 - 80 / 774
[ Back to top ]