
Fターム[5J084AD01]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 時間測定 (774)
Fターム[5J084AD01]に分類される特許
161 - 180 / 774
距離センサ及び距離画像センサ
【課題】高感度化を図りつつ、電荷の高速転送を実現することが可能な距離センサ及び距離画像センサを提供すること。
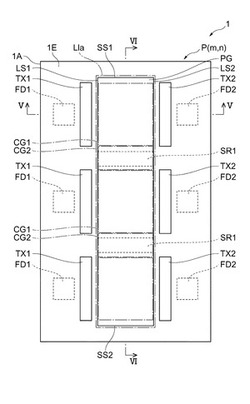
【解決手段】フォトゲート電極PGは、平面形状が第1方向で互いに対向する第1及び第2長辺LS1,LS2と第2方向で互いに対向する第1及び第2短辺SS1,SS2とを有する長方形状である。複数の半導体領域FD1,FD2は、第1方向でフォトゲート電極PGを挟んで対向し且つ第2方向に沿って互いに空間的に離間して配置されている。フォトゲート電極PGの直下の領域は、第1方向で対向する半導体領域FD1,FD2の間に位置する第1領域CG1と、第1領域CG1に第2方向で挟まれる第2領域CG2と、を含む。第3半導体領域SR1は、第2領域CG2に配置されている。第3半導体領域SR1は、第2領域CG2側でのポテンシャルを第1領域CG1でのポテンシャルよりも高めている。
(もっと読む)
距離センサ及び距離画像センサ

【課題】高感度化を図ることが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】電荷発生領域は、矩形形状を呈し且つ第1の方向D1に伸びる第1の領域R1内に配置されている。信号電荷収集領域は、第1の方向D1に直交する方向で互い対向するように第1の領域R1の第1の方向D1に伸びる2辺R1a,R1b側にそれぞれ設けられ且つ第1の領域R1と重複する複数の第2の領域R2内に少なくとも一部が含まれるように配置されている。転送電極は、第2の領域R2内における電荷発生領域と信号電荷収集領域との間に位置すると共に、第2の領域R2の縁に沿って伸びる部分を有している。電荷発生領域は、その縁が第2の領域R2の縁に沿って伸びている。
(もっと読む)
障害物検知装置
【課題】演算処理量を軽減して、自車の車高よりも低い位置に存在する空中障害物を検知することができる障害物検知装置を提供する。
【解決手段】路面から所定の高さH/2の位置に、水平方向に対して第1の角度θ1で下向きに車両Aに設置され、第1のレーザー光を発光・受光して第1の障害物(路面)を検知する第1の検知手段1と、車両Aの上端から所定の高さH/2だけ低い位置に、水平方向に対して第1の角度θ1と対称の角度である第2の角度θ2で上向きに設置され、第2のレーザー光を発光・受光して第2の障害物(空中障害物)を検知する第2の検知手段2と、第1の検知手段1による発光から受光までの第1の時間T1と第2の検知手段2による発光から受光までの第2の時間T2とを比較して、第2の障害物が車両Aの車高Hよりも低い位置に存在する空中障害物であるか否かを判断する判断手段3と、を有する。
(もっと読む)
レーザ測定装置
【課題】レーザ光が規定方向に照射される回動位置を正確に「基準位置」として設定することができ、その基準位置に基づいて検出物体の相対位置をより精度高く算出し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置1は、検出される距離値が所定の距離条件を満たし、且つ検出される受光量が所定の受光量条件を満たす回動位置を「基準位置」として検出する「基準位置検出手段」と、「基準位置検出手段」によって検出された「基準位置」を基準とする偏向部41の相対的な回動位置を検出する「相対位置検出手段」と、フォトダイオード20(受光手段)によって反射光が受光されたとき、「相対位置検出手段」による相対的な回動位置の検出結果に基づいて検出物体の方向を検出する「方向検出手段」とが設けられている。
(もっと読む)
ビーム光投受光装置
【課題】同軸系タイプのビーム光投受光装置のコンパクト化及び組立て調整作業の容易化を図る。
【解決手段】光源210からスキャンミラー240に向かう投光ビームの光路と、対象領域内の物体から反射しスキャンミラー240から受光素子260に向かう戻り光の光路を分離する投受光分離部材を、1つのプリズム230で形成し、プリズム230は、投光ビームをスキャンミラー240方向に反射する反射領域231(外側反射面)と、スキャンミラー240からの戻り光を透過する透過領域232と、この透過領域232を透過した戻り光をプリズム内部で受光素子260方向に反射する内側反射面Dと有する構成である。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
レーザレーダ装置
【課題】レーザ光が透過板で反射して生じる内部反射光に起因する誤検出を効果的に防止し得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1では、ケース3内に回動反射機構40が収容されており、このケース3には、回動反射機構40に設けられた凹面鏡41からのレーザ光の走査経路上を囲う構成で透過板5が配置されている。更に、反射光が凹面鏡41からフォトダイオード20に至るまでに通る反射光経路を当該反射光経路の外から囲う構成で抑制カバー80が配置されている。そして、抑制カバー80は、凹面鏡41から空間に向けて偏向されたレーザ光の一部が透過板5にて反射する内部反射光を拡散反射させて低減するように構成されている。
(もっと読む)
光測距装置
【課題】最適な測距方式を選択し、測距精度を向上させることが可能な光測距装置。
【解決手段】反射パルスの受光により発生する受光パルスをフィルタリングした後の信号のゼロクロス点を反射パルスの受光時刻として光パルスの投光時刻から受光時刻までの時間を計測し該計測時間に基づいて測距対象物1までの距離を算出する第1測距部6と、反射パルスの受光により発生する受光パルスのレベルが所定の閾値に到達した時点を反射パルスの受光時刻として光パルスの投光時刻から受光時刻までの時間を計測し該計測時間に基づいて測距対象物1までの距離を算出する第2測距部7と、第1測距部6の算出距離と第2測距部7の算出距離とを比較して、算出距離の小さい方を測距対象物1までの距離として選択する選択部8と、を備える。
(もっと読む)
光走査装置及びこれを用いた光測距装置
【課題】光走査部の共振周波数が製造バラツキや温度変化等によって変動しても、光走査部による走査軌跡を変更することなく、光走査部に出力される駆動信号の周波数を上記共振周波数に近づけることのできる光走査装置及びこれを用いた光測距装置を提供する。
【解決手段】光測距装置1は、光反射面を有する可動部が揺動することで該光反射面に入射される光を対象領域内でリサージュ走査する光走査部3、光走査部3に第1、第2駆動信号を出力して可動部を揺動駆動する駆動部5、光反射面に向かってパルス光を出射する光源部7、パルス光の反射光を受光する受光部9及びパルス光を反射した物体までの距離を計測する測距部11を備える。駆動部5は、第1駆動信号の周波数及び第2駆動信号の周波数をこれらの周波数比を維持しつつ変更可能に構成されている。
(もっと読む)
レーザレーダ装置
【課題】回動可能な偏向部をレーザ光投射時及び反射光検出時に兼用するレーザレーダ装置において、投光時のレーザ光の経路と受光時の反射光の経路を適切に確保することができ、且つ投光時のノイズ光の発生を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1は、レーザ光L1の投光経路上且つ反射光L2の受光経路上においてミラー30が設けられている。このミラー30には、凹面鏡41にて偏向された反射光L2をフォトダイオード20に向けて反射する第1反射部31と、レーザダイオード10からのレーザ光L1を凹面鏡41に向けて反射する第2反射部32とが形成され、第1反射部31の第1反射面31aと第2反射部32の第2反射面32aは、傾斜状態又は湾曲状態が異なるように構成されている。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
レーザレーダ装置
【課題】高速処理が可能なレーザレーダ装置を提供できる。
【解決手段】前方に出射したレーザ光に対して反射光の光量が所定値より小さい領域においては光走査速度を標準値より下げて検出を行い、反射光の光量が所定値より大きい領域においては光走査速度を標準値より上げて検出を行う。領域においては光走査速度が標準値より遅くなっているため、ある同じ角度範囲幅においての反射光の積算回数を、角度分解能を下げることなく基準回数より増加させることができる。これにより、歩行者など反射光量の小さい物体を感度よく検出することができる。一方、反射光の光量が大きい領域においては、光走査速度が標準値より速くし、ある同じ角度範囲幅においてのパルスの積算回数は基準回数より少なくするが、元々十分な反射光量が得られているため問題なく正確な距離・方向の検出は可能である。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
ホーム事故検知システム
【課題】駅ホーム上で事故を高い精度で迅速かつ確実に自動的に検知して警報を発し、駅ホーム上で駅員の在・不在、駅ホームの混雑度に応じて自動警報を行えるホーム事故検知システムを提供する。
【解決手段】このホーム事故検知システムは、駅ホームの縁に沿って設置され、計測時刻毎に検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像の状態に係るデータを記憶する記憶手段41と、記憶手段に記憶された旅客像の状態に係るデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客像に対応する旅客に事故が発生したと判定する処理手段52と、事故発生と判定のとき自動的に警報を発する警報手段と、駅ホームに駅員が居るか否かを判定し、警報手段を自動警報不能または自動警報可能にする駅員監視手段(62,64,65)とを備える。
(もっと読む)
位置検出システム
【課題】無線タグリーダによって無線タグの位置を追跡し得る位置検出システムにおいて、無線タグの電力消費を効果的に抑制する。
【解決手段】位置検出システム1において、無線タグリーダ10は、可変指向性アンテナ14を備えると共に、無線タグ50に対して電波の走査速度に関するデータを含む送信データを送信可能とされており、更に、無線タグからの電波を取得したときの可変指向性アンテナに対する電波の最大入射方向に基づいて無線タグ50の方位を追跡可能とされている。無線タグ50は、送信データに含まれる「走査速度に関するデータ」に基づいて、当該無線タグ50における周期的な電波送出時間帯を決定しており、その決定された電波送出時間帯に従い、アンテナ54を介して電波を周期的に送信している。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
レーザレーダ装置
【課題】集光効率を向上でき受光感度が良く、低コスト化及び小型化を実現できるレーザレーダ装置を提供する。
【解決手段】一方向の断面が楕円の一部からなる楕円面反射鏡14を光走査手段12と受光手段16の光路間に設置している。そして、楕円面反射鏡14に対象物から反射してくる反射光を導く固定鏡13が楕円面反射鏡14の一方の楕円焦点位置に設置されている。また、受光手段16が楕円面反射鏡14の他方の楕円焦点位置に設置されている。このため、楕円面反射鏡14を反射した全ての反射光が楕円面反射鏡14の楕円焦点位置に集光する。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、フォトゲート電極PG、第1及び第2ゲート電極TX1,TX2、第1及び第2半導体領域FD1,FD2、並びに第3半導体領域SR1を備えている。フォトゲート電極PGは、光入射面1FT上に設けられる。第1及び第2ゲート電極TX1,TX2は、フォトゲート電極PGに隣接して設けられる。第1及び第2半導体領域FD1,FD2は、各ゲート電極TX1,TX2の直下の領域に流れ込む電荷を蓄積する。第3半導体領域SR1は、第1及び第2半導体領域FD1,FD2から裏面1BK側に離れて設けられ、第1及び第2半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから迅速に対象物体の種別を推定し、また、障害物の大きさや移動の向きを把握できるようにする。
【解決手段】矩形推定部6により、レーザレーダ2に対する対象物体の移動により変化する検出パターンが対象物体の横方向の長さおよび縦方向の長さのいずれであるかを推定し、物体属性推定部7により、推定した前記幅および前記長さの少なくともいずれか一方から、1フレームの検出パターンからでも迅速に対象物体の種別を推定し、対象物体の全体の大きさや移動の向きを知ることもできるようにする。
(もっと読む)
161 - 180 / 774
[ Back to top ]