
Fターム[5J084AD01]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 時間測定 (774)
Fターム[5J084AD01]に分類される特許
81 - 100 / 774
計測装置,計測方法および計測プログラム
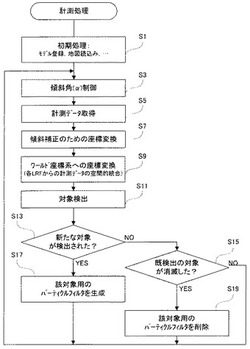
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
車載レーダ装置

【課題】道路環境に適した検知が可能な車載レーダ装置を提供する。
【解決手段】車両が左側通行であることに基づいて生じる左右非対称な道路環境や、ドライバの習性に基づいて生じる左右非対称な死角範囲を考慮して、右方向の検知に用いる右照射光SRは長い検知距離を、左方向の検知に用いる左照射光SLは、広い検知範囲を確保できるように設定(αL>αR,γL>γR,βL>βR)する。これにより、交差点に進入した時に交差道路の手前側車線を右方向から自車両に向かって接近してくる車両を、早期に検知することができると共に、ドライバの注意が右側に偏ることによって左側から前方にかけて広がる死角中の物標を、的確に検知することができる。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間で受光し、第2照射タイミングで照射された前記照射光の前記反射光を第2受光期間でそれぞれ受光するとともに、前記第1照射タイミング又は前記第2照射タイミングに対して予め決められた第3受光期間で受光し、前記演算部は、前記第1受光期間〜前記第3受光期間で得られた光電子数とを用いて前記測距対象までの距離を算出し、前記第1受光期間及び前記第2受光期間は前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含み、前記第3受光期間は前記固体撮像装置に到達する前記反射光の強度が一定となる時間である。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検知する場合、反射強度の弱い、自車の進行方向に対して横長の壁などの物体が自車の進行方向に対して横方向から移動したと誤検知することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向に電磁波を送信し、進行方向に存在する物体に反射させて得た反射点に基づいて物体を経時的に検知する車両用物体検出装置において、反射点を2次元平面に投影して得た点群を検出し(S10)、検出された点群の重心位置を算出し(S10)、算出された重心位置が進行方向に対して横方向に移動すると共に、横方向の検知幅が変化しているか否か判定し(S14,S16,S20,S22,S28)、算出された重心位置が横方向に移動すると共に、横方向の検知幅が変化しているとき、物体は横方向に移動していないと判定する(S24)。
(もっと読む)
固体撮像装置
【課題】画素の駆動精度を低下させることなく、グローバルシャッタ動作の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子と、1つ以上のMOSダイオード構造を構成する電極を有する単位画素と、前記電極に第1電圧を供給する第1電圧源側に設けられた第1接点と、前記電極に前記第1電圧より高い第2電圧を供給する第2電圧源側に設けられた第2接点と、前記第1接点と前記第2接点との間に設けられた第1コンデンサと、前記第1接点及び前記第2接点のどちらか一方に接続することで、前記電極に印加させる電圧を、選択的に前記第1電圧又は前記第2電圧に切り換える切換スイッチと、前記切換スイッチを駆動させて交互に前記第1電圧と前記第2電圧とを前記電極に印加させることで、前記光電子の発生、保持、転送、リセット、及び排出のいずれかを行う画素駆動部とを備える。
(もっと読む)
検査方法、及び検査システム
【課題】配置基準軸と設置基準軸とが規定条件を満たしているか否かの検査を、より好適に実施すること。
【解決手段】配置基準軸と設置基準軸とが水平方向に沿って不一致である場合、対象レーダ装置5では、右規定範囲と左規定範囲とが左右非対称となるため、右規定範囲と左規定範囲とでは、検出開始時間Tsが不一致となる。この場合、対象レーダ装置5から照射され、輪郭範囲の大きさは、正常輪郭範囲の大きさに比べて、大きくなったり小さくなったりする。配置基準軸と設置基準軸とが垂直方向に沿って不一致であれば、輪郭範囲は、対象レーダ装置5を中心として、正常輪郭範囲が回転した形状となる。したがって、検出開始時間Tsが基準時間を超え、検出時間Tdが基準範囲を超えていれば、配置基準軸と設置基準軸とが規定条件を満たしていないことがわかる。
(もっと読む)
レーザレーダ装置
【課題】 スキャン周期を必要に応じて制御可能なレーザレーダ装置を提供する。
【解決手段】 近距離ターゲットが有るか否かを判断し(S150)、近距離ターゲットがある場合(S150:YES)、測距時間要因を変更設定する(S160)。具体的には、通常時よりも、レーザ光の出射間隔である「発光間隔」を短くし、また、同一探査領域からの反射光の「受光回数」を減らすようにする。そして、設定された測距時間要因で測距を行い(S100)、ターゲットの位置を取得し(S110)、ターゲットの速度を算出して(S120)、データを更新する(S130)。つまり、非可動の配光器を用いて探査領域へ並行してレーザ光を照射するようにし、レーザ光の出射間隔及び反射光の受光回数を変更することで、探査に要する時間を変更する。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間及び第2受光期間で受光するとともに、第2照射タイミングで照射された前記照射光の前記反射光を、第3受光期間及び第4受光期間でそれぞれ受光し、前記演算部は、前記第1受光期間〜前記第4受光期間で得られた光電子数を用いて、測距対象までの距離を算出し、前記第1受光期間及び前記第3受光期間は、前記反射光が前記固体撮像装置に到達してから該反射光の強度が最大になるまでの時間を含み、前記第2受光期間及び前記第4受光期間は、前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含む。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、レーザ光の走査をより高速に行い得る構成を、小型化、軽量化を図りつつ実現する。
【解決手段】レーザレーダ装置1に設けられた偏向部41には、水平面に対する勾配状態がそれぞれ異なるように構成された複数の反射面101〜104が中心軸42aを中心として多重に且つ多段に配されている。更に、偏向面41aに対してライン走査がなされるようにミラー31が制御され、この偏向面41a上におけるレーザ光L1のライン走査位置は、偏向部41の回転に応じて複数の反射面101〜104上を相対的に移動する。そして、この相対移動の過程において、ライン走査されるレーザ光L1が複数の反射面101〜104にそれぞれ入射し、各反射面からは水平面に対する角度がそれぞれ異なるようにレーザ光L1が反射するようになっている。
(もっと読む)
状態判定装置、状態判定方法およびプログラム
【課題】監視エリアの様々な状態を容易に確認可能とする。
【解決手段】不特定多数の人(移動体)が往来する環境下での、通常状態での人の移動速度VRおよび移動方向θRを予め求めておく。そして、当該環境下で、人の移動速度Vおよび移動方向θを求め、これら移動速度Vおよび移動方向θと、通常状態において予め求めた移動速度VRおよび移動方向θRとを比較し、比較結果に基づき当該環境の状態が異常状態であるか否かを判定する。
(もっと読む)
レーザレーダ装置
【課題】レーザ光の照射経路上のカバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、受光面20aの前方側且つ下側寄りの位置を部分的に覆う構成で遮蔽部材70が配置されている。この遮蔽部材70には、受光面覆い部77と、上下に並ぶ複数の凸状部71とを備えており、いずれの凸状部71も、中心軸42aを通り且つ受光面20aの中心位置を通る切断面において外形が三角形状となっており、隣接する凸状部間には窪み79が形成されている。そして、窪み79の上側に配置される凸状部下方面は、レーザ光L1が凹面鏡41から前方側に照射されるときに、当該レーザ光L1の一部が透過板80で反射して生じる鏡面反射成分又はガウス拡散成分を窪み79の内壁に向けて反射するようになっている。
(もっと読む)
レーザスキャナ及び動体検知方法
【課題】3次元データ内への動体の測定データの混入防止を自動で行うことで、作業効率の向上を図るレーザスキャナ及び動体検知方法を提供する。
【解決手段】投光光軸34に沿って測距光40を射出する投光光学系33と、測距光40を偏向し測定エリアに照射する偏向光学部材と、偏向光学部材を高低方向に回転させる高低角駆動部と、偏向光学部材を水平方向に回転させる水平角駆動部と、測距光40の反射光に基づき測定を行い測定エリアの距離データを求める測距部4と、測定エリアを含む画像データを連続して取得可能な第2の撮像部6と、制御部7とを具備し、制御部7は画像データと距離データとに基づき3次元画像を取得する第1の画像処理部と、時間的に隣接する画像データの比較により動体を検知する第2の画像処理部とを有する。
(もっと読む)
レーザレーダ装置
【課題】三次元走査可能なレーザレーダ装置において、水平方向に近い方向にレーザ光を走査する場合に水平方向から外れた方向からの外乱光の影響を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1には、フォトダイオード20(受光手段)で受光可能となる視野範囲を変更可能な視野範囲変更手段が設けられている。この視野範囲変更手段は、集光レンズ62からフォトダイオード20までの経路長さを調整すること視野範囲を変更しており、偏向部41からのレーザ光L1の方向が第1方向(水平方向とのなす角度が相対的に大きくなる方向)に設定されている場合には、視野範囲を相対的に広い第1範囲に設定し、レーザ光L1の方向が第2方向(水平方向とのなす角度が相対的に小さくなる方向)に設定されている場合には、視野範囲を第1範囲よりも狭い第2範囲に設定している。
(もっと読む)
ドップラーライダ装置
【課題】ファイバ増幅器を備えたドップラーライダ装置では、光ファイバ増幅器の内部での偏波変動の影響を最小化するため、偏波制御をおこなっていた。
【解決手段】レーザ光を発振する基準光源1からのレーザ光を光分波回路2で送信信号光と局部発振光に分波し、光分波回路2で分波した送信信号光を偏波保持特性を有した光ファイバ増幅器4で増幅して大気中に発射する。大気中での散乱光を受信光として受光し、この受信光と光分波回路2で分波された局部発振光とを光受信回路7で合波し、受信光の局部発振光からの変動成分を電気信号として取り出すことにより、偏波制御を必要としないドップラーライダ装置を得る。
(もっと読む)
車両の物体距離認識システム及び作動方法{VEHICULAROBJECTRANGINGSYSTEMANDMETHODOFOPERATION}
【課題】本発明は、長距離センサ及び短距離センサを持つ車両の物体距離認識システムにおいて、センサ自体によって提供された情報に基づき、少なくとも1つのセンサのサンプリングレートを減少させ、平均故障間隔の向上を図るためのものである。
【解決手段】長距離視野角を有する長距離センサ、及び前記長距離視野角をオーバーラッピングして超過する短距離視野角を有し、角度分解能を有する短距離センサを持つ車両の物体距離認識システムにおいて、サブシステムの作動に求められる放射されたレーザパルスの数を減少させ、前記サブシステムのレーザエミッタの寿命を延ばすために、2つの相補的な物体検知及び距離認識サブシステムのサンプリング回数変調方法を開示する。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
異物検知装置
【課題】低SNR環境下でも、異物を正確に検知することができる異物検知装置を得ることを目的とする。
【解決手段】三次元画像の縦方向成分が同一の画素単位に、異物の検知処理を開始する前に三次元画像撮像装置1から出力された各画素の反射強度値Ii,jの中で、最大の反射強度値Iimaxと最小の反射強度値Iiminを取得して、最大の反射強度値Iimaxを上限閾値THUPに設定するとともに、最小の反射強度値Iiminを下限閾値THLOWに設定する閾値設定部11を設ける。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
距離測定装置
【課題】偏向素子へレーザ光を導くための光学部品を測定範囲内に配置した場合でも死角を形成することなく、広角な範囲を測定可能な距離測定装置を提供する。
【解決手段】レーザ光を用いて測定対象との距離を測定する距離測定装置であって、
レーザ光を出力するレーザ出力部1と、第1の方向に偏光したレーザ光を第1の方向と異なる第2の方向に偏光するとともに測定対象へ向けて偏向する偏向部3と、測定対象の測定範囲内に配置され、第1の方向に偏光したレーザ光を反射して偏向部3へ導き、且つ第2の方向に偏光したレーザ光を透過可能な第1の反射型偏光板2と、第1の反射型偏光板2を保持し、且つ第2の方向に偏光したレーザ光を透過する透明保持体6とを備える。
(もっと読む)
光ファイバ増幅器、光検出装置、及び距離測定装置
【課題】短時間且つ所望のタイミングで増幅率を変更することができる光ファイバ増幅器と、この光ファイバ増幅器を用いた光検出装置及び距離測定装置と、を提供する。
【解決手段】光ファイバ光増幅器は、希土類が添加された光ファイバで構成され、当該光ファイバの一端から入射された信号光を増幅し、増幅された信号光を当該光ファイバの他端から射出する第1の光ファイバと、希土類が添加された光ファイバで構成され且つ第1の光ファイバの他端に結合された第2の光ファイバと、第2の光ファイバに第1の励起光を注入する励起光源と、誘導放出を生起させるスイッチ光を第2の光ファイバに入射させるスイッチ光源とを含み、スイッチ光の入射により第2の光ファイバから誘導放出された第2の励起光を第1の光ファイバに注入する増幅励起部と、を備える。
(もっと読む)
81 - 100 / 774
[ Back to top ]