
Fターム[5J084AD01]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 時間測定 (774)
Fターム[5J084AD01]に分類される特許
41 - 60 / 774
光電センサ並びに物体検出及び距離測定方法
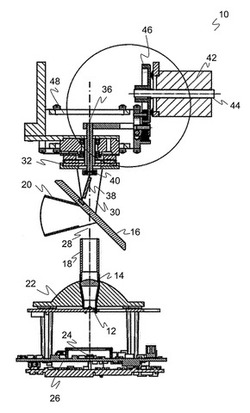
【課題】三次元走査を改良したセンサの提供。
【解決手段】光線を発信するための光送信機12と、光線を周期的に偏向させるために回転軸28を中心として回転可能な偏向ユニット16と、回転軸28に対して横向きの旋回軸を中心として偏向ユニット16を旋回させるための旋回装置と、監視領域で拡散反射又は直反射される光線から受信信号を生成するための光受信機24と、受信信号を参照して監視領域の物体を検出するために構成された評価ユニット26とを有する光電センサ、特にレーザスキャナが記載されている。旋回装置は、偏向ユニット16と結合され、回転軸28に沿った並進運動が偏向ユニット16の旋回運動を引き起こす昇降軸部材36を有している。
(もっと読む)
距離測定装置

【課題】 反射光の受光レベルが飽和状態となるときでも精度良く距離を測定できる距離測定装置を提供する。
【解決手段】 距離測定装置の発光部は、測定光を被測定物に向かって出射する。受光部は、被測定物から反射される反射光を受光する。距離算出部は、測定光が出射されたときから反射光の受光レベルがピークを示す時点までの経過時間に基づいて被測定物までの距離を求める。距離補正部は、受光レベルが飽和状態となりピークの時点が特定できないときには、受光レベルが飽和している時間の長さに応じて被測定物までの距離の値を補正する。
(もっと読む)
レーザレーダシステム,及び取付方法
【課題】自動車に取り付けられるレーザレーダにおいて、モレ光の影響でゴーストが物体として検出されることの低減。
【解決手段】レーザレーダシステム1は、レーザレーダ10と、処理済部材80とを備える。レーザレーダ10は、レンズを含む光学素子を介して、規定角度範囲LA,RAに渡ってレーザ光を照射し、反射されたレーザ光を受光することで物体を検知する。処理済部材80は、レーザレーダ10が取り付けられる自動車における外表面のうち、モレ範囲LE,REと重複する外表面の範囲に反射率を低減させる反射率低減処理が施された部材である。モレ範囲LE,REとは、規定角度範囲LA,RAへのレーザ光の照射に伴って、当該規定角度範囲LA,RAに照射されるレーザ光の強度よりも強度が小さいレーザ光が照射される範囲であり、規定角度範囲LA,RAに隣接する範囲である。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
走査形レーザ距離センサ装置
【課題】対象物の反射率が低い場合でも、確実にはみ出しを検知する走査形レーザ距離センサ装置を提供する。
【解決手段】パレットまでの距離をあらかじめRAM11に記憶する。車両を入庫し、入庫ボタン36を押すことにより、制御回路10は走査形レーザ装置を起動して反射物体までの距離を測定する。車両があるときの測定結果と、RAM11の記憶した距離とを比較し、異なる場合、検知信号を出力する。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
時間振幅変換装置
【課題】複数の時間振幅変換回路を有する場合でも、素子ばらつきの影響を小さくすることのできる時間振幅変換装置を得る。
【解決手段】電圧電流変換素子3a,3bは、増幅器11a,11bの出力電圧に対応した電流を出力する。校正時は、時間振幅変換回路20a,20bに対して、スイッチ2a,2b及びスイッチ5a,5bを切り替えることで、各々基準電流源1を接続し、電圧電流変換素子3a,3bの出力電流値を基準電流源1の電流値に収束させた際の電圧値を容量素子4a,4bの値として記憶する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
残置物検出方法及び装置
【課題】監視範囲が広い平面領域であっても、残置物の色合いの影響を受け難く、精度よく残置物を検出することができる残置物検出方法及び装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を水平方向に走査させる水平走査手段12と、レーザ光を垂直方向に走査させる垂直走査手段13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から残置物Mの距離を算出する距離演算部15と、投光部11、水平走査手段12及び垂直走査手段13の制御を行う制御部16と、を有するレーザセンサ10を備え、レーザセンサ10は、平面Spに近接した高さHに配置され、レーザセンサ10は、受光情報d4が不連続な計測点Pd又は孤立した計測点Piを含む場合に残置物Mとして検出するように構成されている。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】単一の撮像部の画角よりも広い画角を有するとともに距離精度の高い距離画像を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】同一方向に向けて配置される複数のカメラユニット10A〜10Dと、これらの制御および取得される複数の距離画像に対する演算処理を行う演算制御ユニット15とを備える。各カメラユニット10は、対象物へ向けて光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報と前記反射光の強度を示す輝度情報とを画素毎に有する距離画像を取得する撮像部12とを有する。演算制御ユニット15は、第1距離区間探索部、最近接距離区間選択部、第2距離区間探索部、距離情報置換部、2次元位置補正部および距離画像合成部とを有しており、複数の距離画像を合成した際の距離データのばらつきなどを補正する。
(もっと読む)
車載レーザレーダ装置
【課題】検知すべき範囲内に存在する物標に関する物標情報を効率良く求めることが可能な車載レーザレーダ装置を提供する。
【解決手段】操舵角度センサによってステアリングの操舵角度が取得されると、レーザ光を一括して照射し該レーザ光の反射光を受光した受光信号に基づいて、測距部20が検知実行範囲に存在している検知対象物との距離を表す距離データを測距ユニット毎に求める。そして、制御部30は、測距部20にて求められた距離情報に従って検知対象物に関する情報を生成する。ここで、制御部30は、取得された操舵角度に基づいて距離情報の提供元となる測距IC21の一部を選択することで、検知実行範囲を設定する。
(もっと読む)
レーダ装置
【課題】走査反射部と偏光分離素子との間の位置関係の調整を不要にすることができるレーダ装置を提供
【解決手段】レーダ装置1は、レーダ波となるパルスレーザ光を照射する光源2と、レーザ光を検出する光検出器3と、光源2から照射されたレーザ光を走査する走査部5と、入射したレーザ光を光検出器3へ導く受光光学系6とを備える。また走査部5は、偏光分離光変角素子11と、再帰性反射素子12と、1/4波長板13とから構成される。そして偏光分離光変角素子11は、レーザ光を透過可能な材料で形成された板形状の基板21と、偏光分離機能を有する構造となるように基板21の面上に形成された偏光分離構造体22とから構成される。そして偏光分離光変角素子11は、基板21に設けられた回転軸23を中心にして振動し、光源2から照射されたレーザ光のうちTM成分を透過させるとともにTE成分を所定走査角度範囲で走査する。
(もっと読む)
走査式測距装置の信号処理装置、信号処理方法、及び走査式測距装置
【課題】ノイズ源となる物体の背後に存在する監視対象物を適正に検出することができる走査式測距装置の信号処理装置を提供する。
【解決手段】
所定の走査角度毎に出力される測定光に基づいて走査式測距装置から物体までの距離を算出する距離算出部230と、距離算出部230により算出された距離データが、隣接する複数の走査角度方向に存在するときに、当該複数の距離データを纏めたグループを生成し、当該グループに含まれる距離データの最大値をそのグループの代表距離に設定するグループ生成処理部23iと、生成されたグループに含まれる距離データの個数で定義される物体検出幅が、代表距離に応じて予め設定された物体検出最小幅を示す個数以上となる場合に、監視対象物が存在すると判定する監視対象物判定部23jと、監視対象物検知信号を出力する信号出力部24とを備えている。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
41 - 60 / 774
[ Back to top ]