
Fターム[5J084AD07]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 三角測量法 (172)
Fターム[5J084AD07]に分類される特許
41 - 60 / 172
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
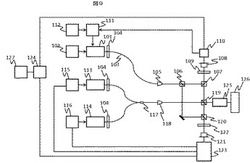
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
距離測定装置

【課題】測定範囲の拡大や分解能の向上が容易に行え、且つ、被測定物の傾斜角度の検出が可能な、自由度の高い構成の距離測定装置を提供することを目的とする
【解決手段】被測定物7の基準表面に対してその鉛直方向から、予め設定する間隔で2つのレーザビームを照射する光源部1aと、被測定物の表面で反射した2つのレーザビームの反射光を予め定める受光角度で受光するカメラ1cと、光源部とカメラとを固定するベースとを備える距離検出部1と、基準表面の鉛直方向の位置と、カメラで検出した当該2つのレーザビームの位置とを予め対応付けした校正テーブルを記憶し、カメラで検出した2つのレーザビームの位置から、基準表面と被測定物の表面との距離を求める距離演算部2とを備え、距離演算部は、2つのレーザビームの数と夫々のレーザビームに対応する校正テーブルを参照して異なる分解能で夫々の距離を求めるようにしたことを特徴とする距離測定装置。
(もっと読む)
物体検出装置および情報取得装置
【課題】簡素な構成にて目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、レーザ光を前記目標領域に向けて投射する投射光学系10と、前記目標領域からの反射光を受光して信号を出力するCMOSイメージセンサ125とを有する。レーザ光が出射されたときにCMOSイメージセンサ125から出力される第1の撮像データから、レーザ光が出射されていないときにCMOSイメージセンサ125から出力される第2の撮像データが減算され、減算結果が、メモリ25に記憶される。3次元距離演算部21cは、メモリ25に記憶された減算結果に基づいて、3次元距離情報を演算し取得する。
(もっと読む)
光学式測距センサおよび電子機器
【課題】小型,高性能,低消費電力,高速応答および安価な光学式測距センサを提供する。
【解決手段】発光素子12と受光素子13を同一リードフレーム11に搭載して、透光性樹脂14a,14bと遮光性樹脂15で一体成形することにより、受光素子13を発光素子12と同一平面に形成し、発光素子12と受光素子13を同一パッケージに形成し、位置検出受光部,処理回路部および駆動回路部が搭載された受光素子13を1チップで形成する。こうして、光学式測距センサのサイズを小さくして製造コストを低減する。さらに、上記位置検出受光部の有効受光部のサイズを、光スポットの設計上のサイズ以下に設定する。こうして、受光素子13のチップを小さくして製造コストの更なる低減を図る。さらに、上記位置検出受光部の無効受光部と無効受光部からの不要な信号とを無くして、応答時間を短縮し、消費電力を低減し、信号処理時のS/Nを大きくし、性能の向上を図る。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
測距センサおよび電子機器
【課題】周辺光による誤測距または誤検知を回避することができる測距センサを提供する。
【解決手段】測距センサ1は、第1信号光Rf1を出射する第1発光素子11と、第2信号光Rf2を出射する第2発光素子12と、第1信号光Rf1または第2信号光Rf2を受光して受光信号を出力する受光素子部20とを備える。第1発光素子11および第2発光素子12は、受光素子部20の光軸20bと交差する平面上に配置され、第1発光素子11は、平面上で受光素子部20の光軸20bに対して第1方位に配置され、第2発光素子12は、平面上で受光素子部20の光軸20bに対して第1方位とは異なる第2方位に配置されている。これによって、周辺光による誤測距または誤検知を回避することができる。
(もっと読む)
光学式測距装置および電子機器および光学式測距装置の校正方法
【課題】パッシブ測距方式を用いずに、窓材からの反射による誤測距または誤検知を防止できる小型の光学式測距装置を提供する。
【解決手段】受光素子12は、発光素子から出射されて測距対象物16により反射された第1の光束17と発光素子11から出射されて窓材15により反射された第2の光束18とを受光レンズ14を介して受光して、第1,第2の光束17,18の受光素子12上における光強度分布を検出する。光強度分布抽出部により、受光素子12により検出された第1,第2の光束17,18が照射された受光素子12上における光強度分布から、第2の光束18の受光素子12上における光強度分布を減算して、第1の光束17の受光素子12上における光強度分布を抽出する。光強度分布抽出部により抽出された第1の光束17の受光素子12上における光強度分布に基づいて、測距対象物16までの距離を距離演算部により演算する。
(もっと読む)
距離計測装置および距離計測方法
【課題】計測対象までの距離を適切に計測することができる距離計測装置および距離計測方法を提供すること。
【解決手段】計測対象に対して複数の投光ドットからなる投光パターンで光を照射し、前記光が照射された計測対象を撮像することで、前記計測対象までの距離を計測する際に、前記投光パターンを構成する複数の投光ドットを、前記光の光軸と垂直な面上の前記光の照射位置と撮像位置とを結ぶ直線と平行な複数の線であるグリッド線のうち、それぞれ、所定の一対のグリッド線を両端とするものとし、該投光ドットの両端を画定するグリッド線の位置、および前記撮像ドットの撮像画面上の位置に基づき、前記撮像ドットと、前記投光ドットとの対応付けを行い、対応付けた撮像ドットおよび投光ドットに基づいて前記計測対象までの距離を計測する。
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
動体判別機能付き電子機器
【課題】 動体を正確に判別することができるコンパクトな電子機器を提供する。
【解決手段】 動体しきい値記憶手段104の動体しきい値を、測定対象物までの距離が遠い場合には大きく、測定対象物までの距離が近い場合には小さくなるように、測定距離範囲毎に予め設定する。動体判定手段106は、測距値の最大値と最小値の差が所定の動体しきい値よりも大きい場合に測定対象物が動体であると判定する。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】小型,高性能であり、リフローやフロー半田による実装が可能な安価な光学式測距センサを提供する。
【解決手段】基板11上の発光素子12と受光素子13および信号処理部14とを透光性樹脂で封止して成る樹脂形成体15,16を、遮光性樹脂で一体成形して樹脂形成体17を形成し、樹脂形成体17の上面および両側面を熱硬化性樹脂のレンズ19,20が設けられた金属性のレンズ板21で覆って、光学式測距センサを構成している。また、レンズ板21の下端部をGND端子としている。こうして、カーボン入り熱可塑性樹脂のレンズ付きケースを用いる場合よりも耐熱性を高めて、半田付けにより確実に実装することができる。また、レンズ板21に凸状部21aを設けたので、発光側からの光が受光側レンズ20に直接入射するのを防止できる。また、基板11を用いたので、樹脂封止の際に裏側まで樹脂成形する必要がなく厚さを薄くできる。
(もっと読む)
位置検出装置
【課題】位置検出に伴う計算量を削減し、処理の高速化及び装置の低コスト化を図る。
【解決手段】一対の画像からなるステレオ画像を所定の時間間隔で取得する画像取得部11と、前記ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内の検出対象領域にマッチングする前記比較画像内のマッチング領域を探索する探索部12と、前記基準画像内の検出対象領域の位置及び探索部12により探索された比較画像内のマッチング領域の位置から求まる視差に基づいて、当該ステレオ画像内に存在する物体の撮影地点からの距離を算出する距離算出部13と、距離算出部13により算出された距離に応じて、当該ステレオ画像の次に取得されるステレオ画像についての探索部12による前記比較画像内の探索範囲を変更する探索範囲変更部14とを備える位置検出装置である。
(もっと読む)
正反射面の相対位置を測定する方法及び装置
【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
反射型光電センサ
【課題】被検出対象に対する検知範囲がより広く、且つセンサ感度のより高い反射型光電センサを提供することにある。
【解決手段】反射型光電センサ10は、光を収束する投光レンズ1を介して投光する第一の投光素子2と、被検出対象で反射した光を集光する受光レンズ3を介して光を光電変換する受光素子4と、をパッケージ6内に離間して配置させ、第一の投光素子2と受光素子4との間に、第一の投光素子2からの投光により前記被検出対象で反射した光が受光素子4の受光範囲外となる距離において受光素子4が受光可能となる光を投光する第二の投光素子7,8を有する。第二の投光素子7,8は、受光素子4から異なる間隔を隔て2個設けられ、パッケージ6は、第二の投光素子8からの直接光が受光素子4に入射することを妨げる遮光壁9を受光素子4と最も近い第二の投光素子8との間に備えている。
(もっと読む)
反射型光電センサ
【課題】不感帯を縮小することができる反射型光電センサを提供する。
【解決手段】反射型光電センサは、第1の投光素子2からの光を被検出対象(図示せず)に投光する投光レンズ1と、第1の投光素子2から出射され前記被検出対象により反射される光を受光する受光素子4と、第1の投光素子2と受光素子4との間に配置され前記被検出対象に投光する第2の投光素子7と、一面に第1の投光素子2からの光を外部に出射するための第1の窓部16aおよび前記被検出対象により反射される光を内部に入射させ受光レンズ3を介して受光素子4に入射させるための第2の窓部16bを有するセンサボディ6とを備える。受光レンズ3が、投光レンズ1の焦点距離よりも焦点距離が短く設定され且つ第1の投光素子2の光軸方向に沿った方向において投光レンズ1よりも受光素子4側に位置する。
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】時点t21,t22,t23において、X方向における光の走査位置が位置P12に一致し、時点t21a〜t21bの期間、時点t22a〜t22bの期間、時点t23a〜t23bの期間に露光が行われる。この場合、露光の開始時点と終了時点との中間の時点で、投光方向が所定の方向と一致する。すなわち、時点t21a〜t21の期間の長さと時点t21〜t21bの期間の長さとが等しく調整され、時点t22a〜t22の期間の長さと時点t22〜t22bの期間の長さとが等しく調整され、時点t23a〜t23の期間の長さと時点t23〜t23bの期間の長さとが等しく調整される。
(もっと読む)
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
光スポット位置検出装置およびそれを含む光デバイス、並びに、その光デバイスを含む電子機器
【課題】メモリ部のビット数を増大させることなく近距離から遠距離までの入射光の光スポットの位置を検出できる。
【解決手段】メモリ部25における記憶部の画素データが飽和した場合には、以後のフレームにおいて、発光素子11の発光停止と、固体撮像素子17の露光停止と、メモリ部25への画素データの転送停止とのうち、少なくとも何れか一つを行うようにしている。したがって、画素データが飽和したことによる受光強度分布形状の崩れを1つのフレーム分の最小限に止め、メモリ部25において画素データが飽和した場合でも受光強度分布形状に基づく光スポット位置の演算が可能になる。その結果、メモリ部25のビット数を増大させることなく、近距離から遠距離までの入射光の光スポット位置を検出できる。また、メモリ部25に対する画素データの不要な積算を行わないので、メモリ部25における1画素当たりのビット数の増大を防止することができる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離や反射率の異なる物体の距離を高い精度で計測する。
【解決手段】
次数の異なる照射角度の関数で表現される2種類の照度パタンの照射光を第1ライト21及び第2ライト22に照射させる照射制御機能と、カメラシステム30に各照射光の反射光の撮像データを取得させる撮像制御機能と、得られた各撮像データから種類の輝度パタンを取得させる輝度パタン取得機能と、この2種類の輝度パタンから各画素の指標値を算出する指標値算出機能と、指標値の連続性に基づいて観測領域を識別する観測領域識別機能と、各観測領域の指標値に基づいて、その観測領域を照射する照射光の照射角度を算出する照射角算出機能と、算出された照射角度と、観測領域の撮像角度と、第1ライト21及び第2ライト22とカメラシステム30との位置関係に基づいて、物体までの距離を算出する距離算出機能を実現させる制御装置10を備える。
(もっと読む)
光学デバイス、この光学デバイスを用いた物体検出方法及び電子機器
【課題】検出対象物の近接を検出できる光学デバイス、これを用いた物体検出方法及び電子機器を提供する。
【解決手段】赤外LEDと、反射光の光量及びスポット位置を示す信号を出力するCMOSイメージセンサと、出力された信号をアンプするとともに信号処理を実施する信号処理部20と、反射率ごとの検出物距離と受光量との関係、第1基準値及び第2基準値を示すデータが格納されたデータベース記憶部30とを備えたものであり、信号処理部20は、スポット位置に基づいて検出物距離を算出する第1信号処理と、検出物距離及び反射光の光量を反射率ごとの検出物距離と受光量との関係と比較して検出物の反射率を求める第2信号処理と、当該反射率が第1基準値と一致するか判断する第3信号処理と、一致する場合に検出物距離が第2基準値と一致するか判断する第4信号処理と、一致する場合に検出対象物の近接を示す信号を出力する第5信号処理とを実施する。
(もっと読む)
41 - 60 / 172
[ Back to top ]