
Fターム[5J084AD07]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 三角測量法 (172)
Fターム[5J084AD07]に分類される特許
21 - 40 / 172
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
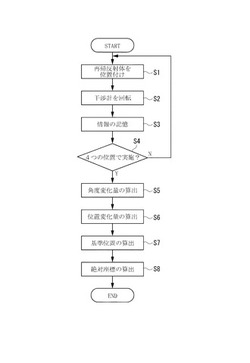
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム

【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
距離測定装置
【課題】本発明は、複数ビームを使用した3角測量方式による距離測定装置において、複数ビームの山部のプロファイルの非対称性による測定精度のバラツキを軽減した距離測定装置を提供する。
【解決手段】レーザビームを偏向して、複数点を時分割で同じ時間、且つ、同じ間隔で測定物表面を照射する偏向ビーム生成部13とレーザビームの反射光を1つの走査信号として、レーザビームの偏向タイミングと同期して受光するCCDカメラ部11と、偏向ビーム生成部とCCDカメラ部とを固定する検出基盤部12とを備える検出部1と、CCDカメラ部の出力を一定に制御するAGC21と、当該出力のビームプロファイルの形状と位置の変化から、測定物10表面と検出部1との距離を求める演算部22とを備える。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
光学式変位センサの調整方法、および光学式変位センサの製造方法
【課題】容易に、光学式変位センサの光学系を調整することが可能な光学式変位センサの調整方法を提供することである。
【解決手段】所定の光学系を有する光学式変位センサ10において、所定の光学系をシャインプルーフの条件を満たすように調整する。所定の光学系は、測定対象物16に対して光を照射する投光モジュール9と、投光モジュール9からの光による測定対象物16からの反射光を受光する受光素子13と、測定対象物16と受光素子13との間に位置して、反射光を受光素子13に結像する受光レンズ14とを備え、調整方法は、受光レンズ14のみを、受光レンズ14の光軸方向(Z1方向)、および受光レンズ14の光軸方向に垂直な方向(X1方向)に移動させることにより調整する。
(もっと読む)
受光レンズ、および光学式変位センサ
【課題】光学式変位センサに用いられた際に、測定性能を向上すると共に、小型化して、安価に製造可能な受光レンズを提供することである。
【解決手段】受光レンズ14は、測定対象物に対して光を照射する投光モジュールと、投光モジュールからの光による測定対象物からの反射光を受光する受光素子とを備える光学式変位センサに用いられる。受光レンズ14は、測定対象物と受光素子との間に位置して、反射光を受光素子に結像するものであり、レンズ本体40と、レンズ本体40の反射光が入射する側の表面40aに形成され、レンズ本体40と屈折率の異なる樹脂で形成される樹脂層41とを含む。
(もっと読む)
投光ビームの調整方法
【課題】シャインプルーフ光学系を用いた光学式変位センサにおいて、測定精度が安定した投光ビームの調整方法を提供する。
【解決手段】シャインプルーフ光学系を用いた光学式変位センサ10は、測定対象物に対して光を照射する投光モジュール9と、投光モジュール9からの光が測定対象物で反射して、反射光を受光面で受光する受光部13と、測定対象物と受光部13との間に位置して、反射光を受光面に結像する受光レンズ14とを備える。投光ビームの調整方法は、受光部13における像のサイズが、投光モジュール9を構成する投光レンズ12と測定対象物との距離によらず一定になるように光源11から照射される光の焦点位置を調整する。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の2点間距離を非接触で測定することができるレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の2点A,B間距離LABを非接触で測定するレーザレーダ方式の測距装置である。レーザダイオード2はレーザ光を射出し、スキャナ3はレーザダイオード2からのレーザ光を偏向させて2点A,Bに対して順に照射する。フォトダイオード6は、2点A,Bで反射したレーザ光をそれぞれ受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号とスキャナ3の動作情報を用いて2点A,B間距離LABを算出する。スキャナ3は、2点A,Bを含む直線上での1次元走査が可能であり、2点A,B間の線分ABをレーザ光の1次元走査により描画表示する。
(もっと読む)
距離測定装置、非接触式脈拍測定装置および電子機器
【課題】長距離の測定が可能で、かつ、低消費電力である距離測定装置を提供する。
【解決手段】この距離測定装置によれば、演算回路65は、遠赤外線センサ14の出力信号Bを被測定物50の放射率に基づいて補正した補正出力信号(B×Aave)を出力するから、従来は非接触温度計にしか使えなかった熱型の赤外線センサを、パッシブ型の距離測定センサ22として使用可能になると共に、赤外線を常に発光する必要が無いことから、消費電力が小さくて済む。また、一方、被測定物50までの距離が第1の距離(80cm)以下の短距離の測定には、反射型の距離測定センサ21の出力信号を距離測定信号として用いるので、比較的少ない消費電力で正確に距離測定できる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】ロボットや車両等の移動物体に搭載しても途切れることなく常に距離を計測することのできる距離計測装置を提供する。
【解決手段】本発明の距離計測装置は、搭載された移動物体の移動方向に投光パターンを照射する投光部2と、投光パターンが照射された方向の画像を撮像する撮像部3と、撮像部3で撮像された画像から計測対象物に照射された投光パターンのドットを抽出する照射光抽出部4と、照射光抽出部4で抽出された投光パターンの照射方位を算出する照射方位算出部5と、照射方位と撮像部3の撮像方向と投光部2と撮像部3との間の距離とを用いて幾何学的関係から計測対象物までの距離を計測する距離計測部6とを備えており、投光パターンは、移動物体の移動方向にある消失点から放射される直線上に複数のドットを配置した構成になっていることを特徴とする。
(もっと読む)
距離測定装置
【課題】対象物体との距離が遠くても測距精度が低下しない。
【解決手段】赤外LEDとイメージセンサ12とが基板上に設置されて、距離測定装置が構成されている。イメージセンサ12には、ピクセルアレイ20と、ピクセルアレイ20の各ピクセルからの受光信号を処理するDSP回路21と、DSP回路21による処理の際に用いる情報等を格納するメモリ22と、上記赤外LEDを駆動するドライバ回路23とが内蔵されている。DSP回路21は、対象物体で拡散反射されてピクセルアレイ20上に形成された光量分布24の直径を求め、メモリ22に格納されている対照値との比較により、対象物体までの距離を求める。したがって、対象物体の反射率が不均一であってもその影響を極小さくすることができ、対象物体までの距離をより正確に求めることができる。
(もっと読む)
光学式測距装置
【課題】簡単な構造にて、周囲温度の変化と自己発熱とによる測距精度の低下を防ぐことができる光学式測距装置を提供する。
【解決手段】測距対象物までの距離を測定しているときの温度センサ25によって検出された温度と、上記距離を測定していないときの温度センサ25によって検出された温度との変化量に基づいて検出値を補正した後に三角測距法により測距対象物までの距離を算出する受光素子12と、発光レンズ14及び受光レンズ15の間の距離を制御するレンズ間距離制御部18とを備えており、レンズ間距離制御部18は、測距装置10の周囲温度の変化によって生じる測距装置10の温度の変化に対する、発光レンズ14と受光レンズ15との間の距離の変動量と、測距装置10の自己発熱によって生じる測距装置10の温度の変化に対する当該距離の変動量とを近づけるように、当該距離を制御する。
(もっと読む)
物体検出装置および情報取得装置
【課題】コンパクトな構成にて、回折光学素子の劣化を検出可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、波長830nm程度のレーザ光を出射するレーザ光源111と、偏光ビームスプリッタ(PBS)113と、1/4波長板114と、DOE116と、PD117を備えている。DOE116は、レーザ光を所定のドットパターンにて目標領域に照射する。PD117は、DOE116によって回折および反射されたレーザ光の一部を受光する。
(もっと読む)
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
測距装置および電子機器
【課題】測距と同時に方向検知を可能とする測距装置を提供する。
【解決手段】測距装置は、第1の発光素子105aおよび第2の発光素子105bと、受光素子106と、演算部110とを有する。演算部110は、受光素子106の光強度分布において、強度が最も強くなる地点を最大ポイントと定義し、光強度分布の両端を第1の最端ポイントおよび第2の最端ポイントと定義したとき、最大ポイントと第1の最端ポイントとの間の距離と最大ポイントと第2の最端ポイントとの間の距離との比率に基づいて、被検出物までの距離と被検出物の移動方向とを演算する。
(もっと読む)
光学式測距センサ、および、それを搭載した電子機器
【課題】高耐熱性を有してリフローまたはフロー半田による実装を可能にする。
【解決手段】発光素子12と受光素子13および信号処理部14との夫々を透光性樹脂で封止して成る第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂で一体成形して第3樹脂形成体18を形成し、この第3樹脂形成体18上に、金属部25に熱硬化性樹脂で発光レンズ23および受光レンズ24が成形されたレンズ板21を載置する。そして、高耐熱の遮光性熱可塑性樹脂で一体成形して第4樹脂形成体26を形成し、レンズ板21を第4樹脂形成体26によって第3樹脂形成体18に固定する。このように、第1,第2樹脂形成体16,17を、高耐熱の遮光性熱可塑性樹脂でモールドすると共に、発光レンズ23および受光レンズ24を熱硬化性樹脂で成形することにより、光学式測距センサの実装時における耐熱性を高め、リフローまたはフロー半田による実装を可能にする。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
変位センサ
【課題】測定部位毎の態様が急変しても、安定して適切な測定を行うことができる変位センサを提供する。
【解決手段】フィードバック回数設定部19及び制御部16にて1出力周期において複数回の調整の設定がなされると、制御部16はその最後のフィードバック調整後の測定値信号の出力を行い、受光信号が安定するまでの過渡期における測定値の排除が行われる。
(もっと読む)
距離測定装置および距離測定方法
【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
21 - 40 / 172
[ Back to top ]