
Fターム[5J084AD07]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 三角測量法 (172)
Fターム[5J084AD07]に分類される特許
101 - 120 / 172
測距装置
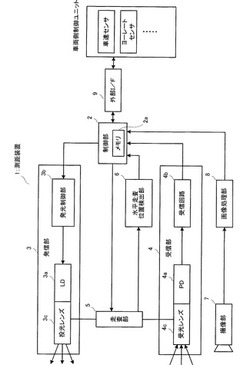
【課題】物体までの距離が短いか、長いかにかかわらず、当該物体までの距離の計測が精度よく行える測距装置を提供する。
【解決手段】測距装置1は、物体までの距離が長いときには、LD3aがレーザ光を発信してから、PD4aが反射光を受光するまでの経過時間を計測し、この経過時間に基づいてLD3aが発信したレーザ光を反射した物体までの距離を計測する。一方、物体までの距離が短いときには、画像処理部8から入力された、撮像画像における、撮像レンズの光軸位置と、LD3aから発信されたレーザ光の照射位置と、の相対的な位置関係から、物体までの距離を算出する。
(もっと読む)
環境認識装置

【課題】通常の感度のカメラを用いながら、他の装置との干渉を効果的に回避するようにした環境認識装置および方法を提供する。
【解決手段】環境空間に存在する被測定物に向けて1フレームを規定するパルス列のデューティファクタτ/Tに従って間欠的に光パターンを照射する照射器、光パターンが照射されたときの露光で撮影して得た画像と照射されないときの露光で撮影して得た画像の差分画像を出力するカメラ、および差分画像に基づいて被測定物を認識する認識手段を備えた環境認識装置において、1フレーム内においてパルス列のパルス繰り返し周期Tをランダムに変化させて前記光パターンを照射するタイミングを制御するタイミング制御器を備える。
(もっと読む)
光学式変位センサ
【課題】 センサヘッドと専用のデータ処理装置(アンプユニット)の接続が可能であるとともに、専用のデータ処理装置を切り離したセンサヘッド単体でも汎用のデータ処理装置に容易に接続可能な光学式変位センサを提供することを目的とする。
【解決手段】 センサヘッド3は汎用インターフェース5を介して専用のデータ処理装置(アンプユニット)7だけでなく汎用のデータ処理装置8にも接続可能であるように設けられているので、センサヘッド3と専用のデータ処理装置7の接続だけでなく、専用のデータ処理装置7と切り離したセンサヘッド3単体でも汎用インターフェース5を用いて汎用のデータ処理装置8に容易に接続でき、センサヘッド3単体から汎用のデータ処理装置8へ受光データまたは変位データを出力するという簡易な接続が可能となる。
(もっと読む)
光学デバイスおよび電子機器
【課題】小型化を図ることができると共に被検出物の検出時間を短縮できる光学デバイスを提供する。
【解決手段】一つの発光素子2、一つの二次元位置検出受光素子3およびIC4を備えている。このように、上記発光素子2を一つだけ使用しており、小型化を図ることができると共に、被検出物の検出時間を短縮できる。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】物体の三次元形状を迅速に精度良く計測する。
【解決手段】物体2に正弦波状の光パターンを投射するとともに、光パターンが投射された物体2を撮影し、その撮影画像に基づいて物体2の三次元形状を計測する三次元形状計測装置であって、短波長の光パターン20及び長波長の光パターン30の各々を物体2に投射するプロジェクタ3と、短波長の光パターン20及び長波長の光パターン30が投射された物体2を撮影するカメラ4と、カメラ4で撮影された画像に基づいて、短波長の光パターン20の相対位相及び長波長の光パターン30の相対位相を算出し、算出した長波長の光パターン30の相対位相に基づいて、短波長の光パターン20の相対位相と絶対位相との間のオフセット値を求め、該オフセット値と、算出した短波長の光パターン20の相対位相とに基づいて、物体2までの距離Zを求める制御部5とを備えることを特徴とする。
(もっと読む)
光センサ回路および光センサアレイ
【課題】光センサ回路のレイアウト面積を増大させることなく、光センサ回路の消費電流を一定に保ち、熱平衡状態を維持することのできる光センサ回路および光センサアレイを提供する。
【解決手段】光センサ回路は受光した光量に応じた値の光電流を生成する光電変換手段,増幅回路,増幅回路の入出力端子間に接続されて前記光電流を積分するコンデンサおよびコンデンサの両端に接続されたリセットトランジスタを有し、リセットトランジスタを待機モードでオンさせる。また、この光センサ回路を複数有する光センサアレイについても適用できる。
(もっと読む)
撮像装置及び距離測定方法
【課題】カメラを配置する位置に制約を受けることなく距離を測定すること。
【解決手段】インカメラ201は、撮像する。アウトカメラ202は、インカメラ201が撮像する方向と反対方向を撮像する。距離測定部203は、撮像した各撮像対象物までの各々の距離を測定する。距離判定部204は、測定した各撮像対象物までの各々の距離を加算して加算値を求めるとともに、加算値に通信端末装置100の幅の長さを補正値として加算することによって、撮像対象物間の距離を算出する。画面生成部207は、インカメラ201で撮像した画像とアウトカメラ202で撮像した画像とを合成して合成画像を生成するとともに、生成した合成画像と撮像対象物間の距離を示す文字情報とを合成する。画像表示部209は、合成画像と文字情報とを合成した画像を表示する。
(もっと読む)
携帯装置および距離測定方法
【課題】携帯装置の上側筐体と下側筐体との回転を利用して2点を指示し、2点間距離を簡便に測定する。
【解決手段】ユーザは、上側筐体10および下側筐体20の一方のレーザポインタで、測定対象の第1の点を指示し、上側筐体10および下側筐体20を開いてその他方のレーザポインタで測定対象の第2の点を指示する。角度センサによりこのときの一方の筐体に対する他方の筐体のなす角度が求められる。距離センサにより2点の少なくとも一方までの距離が測定される。求められた角度および距離に基づいて2点間距離が計算される。
(もっと読む)
距離画像生成方法及びその装置
【課題】装置の大型化、高コスト化を招くことなく、精度の高い距離画像を生成することができる距離画像生成装置を提供する。
【解決手段】
カメラ10には2つの撮像部PA、PBが設けられ、撮像部PAと撮像部PBから、可視の波長域の光により結像された画像が取り込まれ、ステレオマッチング法を用いて距離画像Aが生成される。一方、撮像部PBは、赤外光により結像された画像を取り込むことができ、赤外光照射部18から被写体に照射されて反射した赤外光による赤外画像が取り込まれ、TOF法を用いて距離画像Bが生成される。そして、距離画像Aにおいて距離データが不足する画素を距離画像Bの距離データで補間する。
(もっと読む)
反射型光電センサ
【課題】応差性能の悪化を避けつつ設定距離が長距離化された反射型光電センサを提供する。
【解決手段】被検出物体までの距離を検出する反射型光電センサであって、被検出物体からの反射光を第1、第2の受光領域で受光する光検出器20と、被検出物体に向けて光を投光する投光素子(LED)14とを備える。投光素子14は、第1、第2の受光領域における受光量差がゼロになる距離(設定距離)から被検出物体が遠近方向に動いた場合の受光量差の変動量が最大となるように、投光軸まわりに回転させた回転角が決定されている。
(もっと読む)
ビーム照射装置およびレーザレーダ装置
【課題】小型の簡素な構成によって、レーザ光の走査の容易な制御を実現できるビーム照射装置を提供する。
【解決手段】このビーム照射装置1は、レーザ光20を出射する光源11を備える。また、光源11から出射されたレーザ光20を反射し、目標領域に向けて照射させるミラー15を備える。また、ミラー15を移動させてレーザ光20を走査させる移動機構17を備える。また、ミラー15において分離されたレーザ光20の一部である分離光21を受光するとともに、受光面上における分離光21の受光位置を検出する検出部19を備える。また、光源11と移動機構17とを制御する制御回路30を備える。そして、上記ミラー15は曲面ミラーであり、移動機構17は曲面ミラー15を平行移動させるものであって、曲面ミラー15は、レーザ光20が入射する側の面である第1面において、レーザ光20を反射する。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】エラー発生のプロセスを詳細に解析するのに適した光学式変位計を提供する。
【解決手段】増幅器で得られた受光信号の、第1方向における各ピークの分布が所定の範囲内となるように、投光部の発光量及び増幅器の増幅率を含む操作量の少なくともいずれかのパラメータをフィードバック制御するための受光レベル制御手段と、受光レベル制御手段で制御される操作量又は受光量が所定値を越える場合に、アラーム信号を出力するためのアラーム検出手段と、プロファイル形状及び/又はトレンドグラフを、取得した時間情報と共に保存し、さらにアラーム検出手段がアラーム信号を出力した期間を記録するためのメモリ部とを備え、アラーム検出手段がアラーム信号を出力した期間を、表示部のトレンドグラフ表示領域においてトレンドグラフ上に表示可能に構成している。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】時間的に異なる形状の測定対象物を測定、対比するのに適した光学式変位計等を提供する。
【解決手段】投光部からの照射光の反射光により、第1の方向の各点において、増幅器で得られた増幅信号に基づき、測定対象物のプロファイル形状を演算可能なプロファイル演算部と、プロファイル演算部で演算された測定対象物のプロファイル形状を表示可能な表示部と、プロファイル演算部で演算されたプロファイル形状を、取得した時間情報と共に保存するためのメモリ部とを備え、メモリ部に保存された過去のプロファイル形状を、取得時間を指定して呼び出して表示部に表示させることにより、時間的に異なる複数のプロファイル形状を対比可能に構成できる。これにより、異なる時間に撮像された複数のプロファイルを表示部上に表示して対比、計測を容易に行える。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】2次元状に受光素子が配置された光学式変位計において、ワークに応じて安定した受光量を得ることを可能とする。
【解決手段】測定対象物からの帯光の反射光を受光するための2次元受光素子と、増幅器で得られた増幅信号の、第1方向における受光信号波形のピークレベルの分布が所定の範囲内となるように、投光部3の発光量及び増幅器の増幅率を含む操作量の少なくともいずれかのパラメータをフィードバック制御するための受光レベル制御手段61と、測定対象物の変位を測定する測定モードと、受光レベル制御手段61の操作量を設定する設定モードとを切り替えるためのモード切替手段53とを備え、設定モードにおいて、予め測定対象物に対して投光部3で帯光を照射し、第1の方向の各位置における増幅信号のピークの分布状態を測定し、受光レベル制御手段61が、第1の方向における分布状態に応じて操作量を調整する。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】受光画像の視認性を高め、プロファイルの確認を容易にする。
【解決手段】投光部からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき生成された受光画像を表示するための表示部と、受光画像に対し、画素毎の受光信号の階調を、複数の範囲に区分けし、範囲毎に異なる色を割り当て、受光画像の画素毎に、その階調に割り当てられた色を着色する着色処理を施した状態で表示部に表示可能な受光画像着色手段とを備えることができる。これにより、受光信号の階調幅毎に着色することで、受光画像が等高線図のように表示され、着色された階調幅の粗密によって受光分布勾配が急峻であるか、緩やかであるか等が認識し易くなり、プロファイルの傾斜の度合い等を視覚的に把握できる。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】所望の反射光を確実に補足して高精度な検出を可能とする。
【解決手段】測定対象物に光を第1の方向に広がりを有する帯状の光として照射、又は第1の方向に走査して照射するための投光部と、測定対象物からの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子と、2次元受光素子からの受光信号を増幅するための増幅器と、増幅器で増幅された受光信号に基づき生成された受光画像を表示可能な表示部と、表示部上で表示された受光画像に対して、測定対象から排除する受光マスク領域を指定するためのマスク領域指定手段とを備える。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム及びコンピュータで読み取り可能な記録媒体並びに記録した機器
【課題】センサヘッド部の設置に際して、ワークに対して正確な位置調整を可能とする。
【解決手段】測定対象物からの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子と、2次元受光素子からの受光信号を増幅するための増幅器と、投光部からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき、測定対象物のプロファイル形状を演算可能なプロファイル演算手段と、プロファイル演算手段で演算された測定対象物のプロファイル形状を表示可能な表示部と、プロファイル形状を表示部で表示された状態で、所望の計測領域を指定するための計測領域指定手段と、領域指定手段で指定された計測領域に対して所望の演算を行うことが可能な計測処理部とを備える。
(もっと読む)
距離測定方法および距離測定装置
【課題】簡単なシステムで高精度の測定を行うことができ、しかも安価な距離測定方法および距離測定装置を提供する。
【解決手段】光照射手段により測定対象物に光を照射して、測定対象物のイメージ・センサ上における反射光の結像位置に基づいて測定対象物の距離を測定する距離測定方法において、所定の条件下で第1の基準対象物からの反射光による結像位置と第1の基準対象物の距離とを対応させた距離変換テーブルを、所定の条件下で取得した第2の基準対象物からの反射光による結像位置と任意の条件下で取得した第2の基準対象物からの反射光による結像位置との差分を所定の係数で可変した値を補正値として補正し、任意の条件下における測定対象物からの反射光による結像位置から補正された距離変換テーブルによって任意の条件下での光照射手段と測定対象物との距離を算出するようにしたものである。
(もっと読む)
光学装置及び光学式測定システム
【課題】簡単な構成で、多様な走査パターンの測定用光によって測定対象を走査して測定できるようにすること。
【解決手段】対向配設された円柱型ウエッジプリズム6、7は、光軸30に沿って設けられた貫通穴11、14を有し、光源2からの測定用光31を貫通穴11、14を通して基準測定用光32として測定対象20側に出力すると共に貫通穴11、14以外の部分を通して走査測定用光33として測定対象20側に出力する。円柱型ウエッジプリズム6、7の少なくとも一方を、光軸30を中心に相対的に回転したり、光軸30に沿って移動させて相対距離を変えることによって、測定対象20を多様な走査パターンの走査測定用光33によって走査し、光検出素子18によって検出した基準測定用光34と走査測定用光35に基づいて測定対象20の形状等を算出する。
(もっと読む)
センサシステム
【課題】ヘッド‐コントローラ間を接続するケーブルの線数を減少させることが可能な変位センサを提供すること。
【解決手段】制御部14と通信部22とを信号線31〜33により接続し、LVTTLレベルのブート信号を通信部22から制御部14に送信して該制御部14の回路を設定し、制御部14からLVDS方式により受光データを通信部22に送信するようにした。
(もっと読む)
101 - 120 / 172
[ Back to top ]