
Fターム[5J084AD07]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 三角測量法 (172)
Fターム[5J084AD07]に分類される特許
161 - 172 / 172
ビーム照射装置

【課題】 簡素な構成にて、円滑且つ安定したスキャン動作を実現できるビーム照射装置を提供する。
【解決手段】 半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。このとき、DSP制御回路10は、レーザ光が目標照射領域に一定間隔で照射されるよう、アクチュエータ駆動回路40から正弦波による制御信号を出力するよう制御し、前記制御信号に対応するタイミングにてレーザ光を照射するようレーザ駆動回路を制御する。
(もっと読む)
散乱光によるエラーを抑制するための方法及び光学センサー

【課題】 物体表面(13)上で反射されて、検知器で検知される光線(7)が、タイミングを合わせて作動される主光源(5)を用いて生成される、光学センサー(1)を提供する。
【解決手段】 光線(7)の散乱光によって引き起こされる可能性の有る擾乱作用を抑制するために、主光源(5)の送出休止期間の間に、補償用光源(25)が、主光源(5)の光線(7)の散乱光領域を包含する光円錐を放射する。こうすることによって、この散乱光領域内の物体が、補償用の光に対する成分を発生させ、この成分が、専ら光線(7)の散乱光によってセンサー出力が駆動されるのを防止するものである。
(もっと読む)
携帯端末
【課題】 プロジェクタの利用を不必要に妨げることなく、プロジェクタが出力する光に対してアイセーフを確保することのできる携帯端末を提供する。
【解決手段】 プロジェクタ2は、画像を外部のスクリーンに投射する。距離測定部4は、プロジェクタ2の光源と人物の目までの距離を測定する。光源制御部6は、測定した距離に基づいて、プロジェクタ2の光源の出力を制御する。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】特定の輻射パターンを持つ投射光を被写体に照射するストロボ505、506を有し、ストロボ505、506の被写体反射光を撮像し、撮像した画像の光強度を用いて奥行き画像を得る、形状計測用または被写体抽出用のカメラであって、ストロボ505、506の発光なしの状態にて動画像を撮像し記録メディアに録画できるビデオカメラ533を兼ねており、ストロボ505、506が発光した時に撮像した画像データにインデックス信号を付加しておき、インデックス信号が付加された特定の画像のみを用いて奥行き画像を算出する。
(もっと読む)
光電スイッチ
【課題】小型化を図りつつ受光信号の処理に関する値を容易かつ正確に認識することができる光電スイッチを提供することである。
【解決手段】 ケーシング10の前面部14には、検出領域に光を投射するとともに検出領域からの帰還光を受ける投受光部20が設けられている。ケーシング10の背面部13には、表示部30および2つのプッシュ式の調整スイッチ50が設けられている。ケーシング10内において回路基板100の背面側に回路基板101,102が配置され、回路基板101,102は回路基板100に対して垂直に取り付けられている。表示部30はケーシング10に一体的に形成された透明の窓部35を有し、窓部35に対向するように回路基板100が配置される。回路基板100上には複数のLED31が取り付けられ、LED31上に7セグメントカバー32が配置される。
(もっと読む)
ビーム照射装置
【課題】 簡素な構成にて、円滑且つ安定したスキャン動作を実現できるビーム照射装置を提供する。
【解決手段】 半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。照射レンズを通過したレーザ光は、ビームスプリッタ400によってその一部が反射され分離される。分離された光は、集光レンズ500を通してPSD600上に収束される。DSP制御回路10は、PSD600からの信号をもとに、照射レンズを通過したレーザ光のスキャン位置をモニタする。そして、照射位置がスキャン軌道から外れたとき、アクチュエータ駆動回路40を制御して、照射位置をスキャン軌道に引き戻す。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 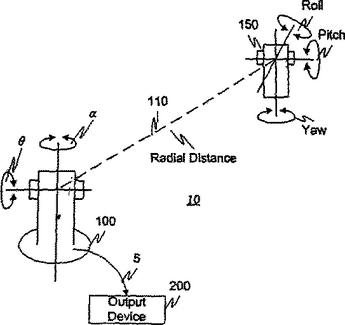 (もっと読む)
(もっと読む)
コンベアベルトのモニタリングシステム
【課題】 コンベヤベルトの縦裂きだけでなく、縦裂きの予兆としての異常な高温等も検出して、縦裂きを未然に防ぐ機能も併せもつコンベヤベルトのモニタリングシステムを提供する。
【解決手段】 トランスポンダ4と、コンベヤベルト1の温度または圧力を計測する計測手段2,3とを、コンベヤベルト1の表層部に、所定の間隔を開けて連続的に設置し、自己の識別情報、および計測値を外部から非接触的にエネルギーを得て発信するようにするとともに、コンベアベルト1から所定の距離を離間して所定の固定位置に設置され、トランスポンダ4および計測手段に対して電磁エネルギーを発するとともに、これらトランスポンダ4および計測手段2,3から、自己の識別情報および計測値を載せた電波を受信する送受信装置5を設置する。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
第1の可動要素の第2の要素に対する変位速度を測定するための光学装置
本発明は、第1の可動要素の、第2の要素に対する変位速度を測定するための光学装置(1)に関し、この装置は、前記要素の一方に固定されており、また、2つの入射ビーム(3a、3b)を、他方の要素の方に伝搬させる2つのレーザ(2a、2b)を備える。本発明の装置(1)は、互いにほぼ垂直な前方(9)及び後方(10)検出用感光性リニア・アレイを備える。追加の前方(12)及び後方(13)感光性リニア・アレイが、前方(9)及び後方(10)感光性リニア・アレイから間隔を置いて配設される。処理回路(11)が、感光性リニア・アレイ(9、10、12、13)に接続され、可動要素の前後方向及び/又は横方向の変位速度を決定する。また、前記回路は、光学的三角測量法を用いて、装置(1)と他方の要素との間隔を決定し、前記間隔に従って、前後方向及び/又は横方向の変位速度値を補正する。  (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 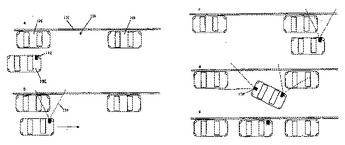 (もっと読む)
(もっと読む)
携帯型の距離測定装置
【課題】本発明は、対象物の表面領域への距離を測定する携帯型の距離測定装置に関する。
【解決手段】距離測定装置は、ハウジングおよび距離の光学的測定のレンズ系を備えている。レンズ系を通して表面領域にビームが送られ、そこで反射する反射ビームを再び集める。距離測定装置は、ハウジングに接続した第1の構成要素を備える。第1の構成要素は、短い距離の測定で、送るビームの方向にハウジングから延ばせて、光学的測定では、スペーサとして作用する。第1の構成要素が延びた状態が、検知装置で自動的に測定される。
(もっと読む)
161 - 172 / 172
[ Back to top ]