
Fターム[5J084BA39]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 受光系に関するもの (1,335) | 複数の受光素子を有するもの (515) | 1次元配列 (69)
Fターム[5J084BA39]に分類される特許
21 - 40 / 69
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 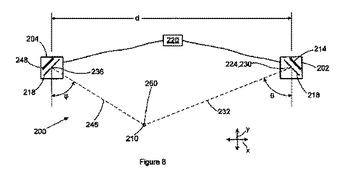 (もっと読む)
(もっと読む)
正反射面の相対位置を測定する方法及び装置

【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
光学式変位センサシステム、コンソール、コントローラ、およびプログラム

【課題】光学式変位センサを用いて対象物までの距離を簡単に且つ精度良く測定する。
【解決手段】測定対象物に光を投光して、イメージセンサで反射光を受光し、各画素での受光信号出力値を取得する。表示画面上に受光信号出力波形を表示して、表示画面上での画素位置の範囲(有効画素範囲)を設定し、有効画素範囲内での最大受光信号出力値が所定の基準出力値と一致するように検出感度を変更する。そして得られた検出感度を用いて測定対象物の変位を測定する。こうすれば、たとえ測定しようとする箇所から十分な強度の反射光が受光できない場合でも、その箇所を含むように有効画素範囲を設定することで、適切な検出感度を用いて精度良く測定することが可能となる。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】従来システムは、目標が動く動的な状況となると移行条件が満たされないにもかかわらず、その後に測定値の補正又は新しい測定が行われる欠点がある。このような動的な状況でも使用できる光通過時間による距離測定方法を提供する。
【解決手段】光通過時間原理により距離を測定する光電センサ10であって、光信号を発光する発光部12、直反射又は拡散反射された受光信号を受光する受光部16、及び解析ユニット18を備えており、解析ユニットが、観察時点に光信号を発光するための発光遅延時間をシステマチックに選択することにより受光信号のための移行条件を満たし、必要な発光遅延時間から光通過時間を計算するように構成されている。さらに、コントローラが設けられており、観察時点に移行条件を満たしているように発光遅延時間を追跡するように構成されている。
(もっと読む)
光センサ
【課題】本来の検知対象を後方の鉢や扉その他のものから正確に判別することができ、精度高く検知対象を検知することのできる光センサを提供する。
【解決手段】発光部36から検知対象に向けて発した光の検知対象からの反射光を受光部42で受光し、発光部36と受光部42の並びの方向をX方向として、反射光の検知対象からの反射角度に応じて変化する受光素子38上のX方向の受光位置を検出することによって検知対象の位置の検知を行う光センサ20において、発光素子32の発光方向の前方に、発光素子32からの光をX方向に絞り、X方向への光の拡がりを制限するスリット孔68を配置し、スリット孔68を透過した光を前方に配置した集光レンズ34を通して平行光として前方に照射するようになす。
(もっと読む)
発光装置、受光システム及び撮像システム
【課題】発熱及び消費電力の抑制、信号光のS/N比の向上等を実現することができ、発光を用いた様々なアプリケーションに適用させることができる発光装置を提供する。
【解決手段】複数の半導体レーザバー12が配列された分散光源14と、分散光源14に対して少なくとも1つの駆動パルスを供給することにより、分散光源14から少なくとも1つのパルス光を出射させる駆動回路16とを有する。分散光源14は、基台18上に、複数の半導体レーザバー12が配列され、さらに、複数の半導体レーザバー12の間にそれぞれ放熱板24が介在されて構成されている。そして、分散光源14から出射されるパルス光のパルス幅が1フェムト秒より長く、且つ、0.25秒未満であり、単一のパルス光のエネルギーが66.8μ[J]未満である。
(もっと読む)
光学式測距装置
【課題】検出対象物に光を照射し、その検出対象物からの反射光の情報より、距離を求めるアクティブ方式の光学測距装置において、待機時間中の消費電力を低減する。
【解決手段】光学測距装置において、一定の検出距離を持つアクティブ方式の測距センサと、測距センサより広い検出距離を持つ熱型赤外線センサを有することで、検出対象物の存在の有無を熱型赤外線検出器で検知する事により、測距センサは検出対象物が熱型赤外線センサ検知距離外にあるときの待機時間をなくすことが可能となり、待機消費電力を大幅に減少させることが可能となる。
(もっと読む)
デイジーチェーン構成の電荷格納領域を有する復調ピクセルおよびそれを操作する方法
【課題】高いサンプリング周波数と比較的多数のサンプルの両方を満足することができる、復調ピクセルアーキテクチャを提供する。
【解決手段】感光性領域110であって、その領域では入射光が光電荷に変換され、この感光性領域110内の横方向のドリフト電界116が光電荷をピックアップ点112に移動させる、感光性領域110と、ピックアップ点112において感光性領域110から光電荷を受け取る電荷格納部154のチェーン152であって、互いに異なる時間区間にそれぞれ対応する光電荷はチェーン152の連続した電荷格納部154を通して伝達される、チェーン152とを備える。
(もっと読む)
レーザレーダ装置
【課題】受信S/N比が十分でない場合においても、所望の信号の検出性能を向上させることができ、精度のよい3D画像を得る。
【解決手段】レーザ光源から送信された光信号を所望のターゲットに向けて放射し、ターゲットからの散乱光を集光する光アンテナと、散乱光を電気信号に変換する光受信機アレーと、電気信号に基づいて、光受信機アレーを構成するチャネル毎に、各チャネルに対応するターゲット上のポイントまでの距離を検出する距離検出部と、検出されたそれぞれのチャネルに対応する距離に基づいて、ターゲットの3D画像を生成する3D画像化部とを備え、所望のターゲットまでの距離に応じて特定の時間帯にゲート時間を設定し、距離検出部による距離検出範囲を制限するゲート時間設定部をさらに備え、距離検出部は、設定されたゲート時間の範囲内において、所望のターゲットまでの距離検出を行う。
(もっと読む)
距離測定装置
【課題】距離測定装置において、光の放射タイミングと受光タイミングとの相対誤差をフィードバック制御するにあたって、広い制御範囲に高い安定性を得る。
【解決手段】発光素子27から変調赤外線を放射し、測定対象物15からの反射光を受光素子27において複数の期間に分割して受光し、評価演算回路38が各期間の受光量から発光と受光との時間差を求め、前記測定対象物15の距離情報を測定する距離測定装置10において、相対的に遅延の小さい受光装置30側では、タイミング信号発生回路35と駆動回路36との間に固定遅延回路39を設けて前記相対誤差を粗調整する。発光装置20側には、駆動回路26の前段に遅延時間調整回路28を設けるとともに、位相比較回路19を設け、発光装置20と受光装置30との駆動信号間の位相差に対応したエラー信号で前記遅延時間調整回路28が前記相対誤差を微調整する。
(もっと読む)
光検出装置
【課題】より高精度の物体検出をすることができるレーダ装置において好適に用いられ得る光検出装置を提供する。
【解決手段】光検出装置1は、M個の受光部101〜10M,選択部20,加算部30および制御部40を備える。各受光部10mは、フォトダイオードPD,トランスインピーダンスアンプ11,トランスコンダクタンスアンプ12,容量素子C,第1スイッチSW1および第2スイッチSW2を含む。トランスインピーダンスアンプ11はアンプA11および帰還抵抗器R11を有する。第1スイッチSW1は、トランスインピーダンスアンプ11の接地端子と第1接地用共通配線W1との間に設けられる。第2スイッチSW2は、トランスインピーダンスアンプ11の接地端子と第2接地用共通配線W2との間に設けられる。
(もっと読む)
方位測定方法及び方位測定装置
【課題】光の放射角を走査することなく、対象物の方位を高速度で検出する
【解決手段】所定波長帯域光を波長に依存して放射角が異なるように分散させて、放射する照射装置と、照射装置により放射された光の対象物からの反射光を受光する受光装置と、受光装置による受光結果から対象物の方位を決定する方位決定装置とを有する。また、照射装置は、スーパーコンティニュアム光を放射する装置である。パルス光を放射する時刻から、反射光の受光時までの遅延時間を測定し、遅延時間から対象物までの距離を測定する距離測定装置を有する。これにより光の放射角を走査することなく、一度に、3次元空間における対象物の座標を測定することができる。
(もっと読む)
測距装置
【課題】背景光による測定誤差の少ない少数ロットのシステムを安価に組み立てられる測距装置を提供する。
【解決手段】発光ダイオード11から出力した検知光を測定対象A1に向かって射出し、検知光の反射光をレンズ13で収束してリニアセンサ14の検知面14aに収束スポットSPを形成させる。演算素子15は、リニアセンサ14からシリアルデータで出力される102個の受光素子18のそれぞれの受光量の数値データを用いて収束スポットSPの受光量ピークを識別して、測定対象A1までの距離を演算し、演算結果を出力端子OUT1〜OUT4を通じて4ビットのパラレルデータで出力する。
(もっと読む)
光学式変位計
【課題】
1次元イメージセンサに2つの出力を設けた時に発生する増幅回路のオフセット量及びゲインの個体ばらつきの影響を低減した光学式変位計を提供することを目的とする。
【解決手段】
1次元イメージセンサ20の奇数画素20aと偶数画素20bの受光量を異なる出力ポートから個別に読み出して、異なる増幅回路15a、15bによって独立して増幅する。増幅された奇数画素20a、偶数画素20bの2つの受光量から形成された2つの受光量分布から、各々受光量のピークとなる画素位置を算出する。算出された2つの画素位置に基づいて、測定対象物までの距離を算出する。。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
車両用光スキャン装置
【課題】適切な大きさの光を照射し、精度の高い検出が可能な車両用光スキャン装置を提供することである。
【解決手段】車両用光スキャン装置に於いて、レーザダイオード55から照射された光が、レンズ34、35、36で案内され、レンズホルダ61及びワイヤバネ108によって第1の方向に振られて走査される。そして、上記レーザダイオード55から照射されるレーザ光260の形状は、上記第1の方向の寸法が変化可能である。
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成する装置であって、第1変調関数を有し、放射波を情景に向かわせる変調された放射波源と、検知変調器を含み、第2変調関数を有するとともに、検知アレイを有し、該アレイが複数の検知要素を含んでおり、情景内で複数の平行な間隔を有するセグメントから反射された放射を検知するとともに、上記検知された放射波に応じて、上記情景の領域までの距離に応答する信号を発生させる検知器と、間隔を有する複数のセグメントの少なくともいくつかを含むとともに上記装置から被写体までの距離を示す強度分布を有する画像を形成するプロセッサと、を含み、複数の間隔を有するセグメントの各々が上記装置に関して距離限界を有しており、該距離限界が上記検知変調器により決定され、複数の間隔を有するセグメントの少なくとも一つが少なくとも一つの他の間隔を有するセグメントの限界と異なる距離限界を有している。
(もっと読む)
光学式変位計
【課題】簡易な構成において、対象物表面上の複数箇所の距離や変位を計測する。
【解決手段】レーザ光源14から出射されたレーザ光は、スプリッタ15で向きの異なる二つの光線に分岐され、対象物2の表面上の異なる二つの位置にそれぞれ光スポットを形成する。測定処理部16は、一次元撮像カメラ17のリニアイメージセンサ19の光検出パターンより二つの光スポットの、一次元撮像カメラ17に対する方向を算定し、算定した二つの光スポットの一次元撮像カメラ17に対する方向と、スプリッタ15からの二つの光線の出射方向と、スプリッタ15の位置と、一次元撮像カメラ17の位置とにより、対象物2の表面上の二つの光スポットの位置各々の二次元座標を、三角測量によって算定する。
(もっと読む)
光学式変位計
【課題】 ラインセンサからの受光量の出力時間を短縮化させ、応答性を向上させた光学式変位計を提供することを目的とする。
【解決手段】 同一の半導体基板上に奇数素子20a及び偶数素子20bが交互に配置されたラインセンサ20と、奇数素子20aの受光量が入力され、当該受光量を順に出力する第1シリアル出力部21aと、偶数素子20bの受光量が入力され、当該受光量を順に出力する第2シリアル出力部20bとを備え、奇数素子20a及び偶数素子20bのいずれか一方から出力される同時に露光して求められた受光量に基づいて、上記ラインセンサの投受光条件を求めるフィードバック制御を繰り返し、受光量調整のための時間を短縮化させる。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。フォトゲート電極PG直下の領域は、電界集中領域1Gからなる。
(もっと読む)
21 - 40 / 69
[ Back to top ]