
Fターム[5J084CA45]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 加算器 (37)
Fターム[5J084CA45]に分類される特許
1 - 20 / 37
レーザレーダシステム、レーザ測距装置および制御装置
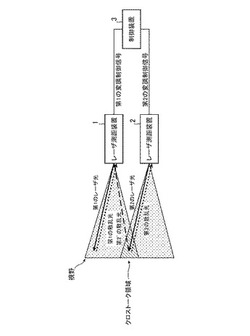
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
(もっと読む)
レーザレーダ装置

【課題】広視野な受信系において背景光を除去する。
【解決手段】所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(発振器1、レーザ装置2、変調器3およびスキャナ4)と、レーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ6および受光器8)と、受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッター7と、電気信号と変調信号との位相差または時間差に基づいて対象物までの距離を算出する距離・強度算出装置9と、電気信号に基づいて背景光を検出する背景光検出装置10と、背景光が検出された場合に、シャッター7を制御して、当該背景光が入射する位置に対応するシャッター素子を閉じさせるシャッター制御装置11とを備えた。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
受信回路、及びレーザレーダ装置
【課題】加算処理によって生じるSN比の低下を防ぐことができ、より適切にSN比の改善を図ることができる受信回路、及びレーザレーダ装置を提供する。
【解決手段】比較器4A,4Bは、それぞれ増幅器2A,2Bから出力される信号振幅の変動状況を監視している。比較器4A,4Bは、閾値電圧と、増幅器2A,2Bから出力された信号の電圧とを比較する。比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも高い場合には、HIGHレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に繋ぐ。他方、比較器4A,4Bは、それぞれ増幅器2A,2Bから出力された信号の電圧が閾値電圧よりも低い場合には、LOWレベルの信号をスイッチ3A,3Bへ出力し、増幅器2A,2Bと加算回路5とを電気的に分離する。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
光波距離計
【課題】温度位相ドリフトを低減するとともに誤差を小さくしながら遠距離測定できる光波距離計を提供する。
【解決手段】複数の主変調周波数F1、F2、F3で変調された第1の発光素子13と、前記各主変調周波数それぞれに近接した複数の傍変調周波数F1−Δf1、F2−ΔF2、F3−Δf3で変調された第2の発光素子14と、両発光素子から出射された光を受光する第1、第2の受光素子40、50と、第1の受光素子に接続された第1の周波数変換器群42、44、46と、第2の受光素子に接続された第2の周波数変換器群52、54、56とを備え、主変調周波数及び傍変調周波数は、それぞれの中で最も周波数の低いものF3、F3−Δf3と近接した周波数の主変調周波数F3−F4及び傍変調周波数F3−F4−Δf4に変更でき、近接法によって近接した2つの主変調周波数の差となる変調周波数F4を用いた場合の目標反射物22までの距離も算出する。
(もっと読む)
時間計測回路
【課題】TAC方式を使用する時間計測回路、またはTAC方式とパルスカウント方式を組み合わせた時間計測回路において、測定精度を向上させるとともに、デッドタイムのない回路構成を提供する。
【解決手段】入力信号Viの振幅の最大値を検出してトリガTRGを出力するピーク検出回路5と、測定開始信号Vgに応答して動作する3個以上の複数のアナログ信号発生部1〜4と、アナログ信号発生部1〜4の動作タイミングを制御する制御部6と、トリガTRGの出力時点におけるアナログ信号発生部の少なくとも1つの出力電圧を用いて、測定開始信号Vgの出力時刻を起点としたトリガTRGの出力時刻を算定する算定部7とを備えている。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
光スポット位置検出装置およびそれを含む光デバイス、並びに、その光デバイスを含む電子機器
【課題】メモリ部のビット数を増大させることなく近距離から遠距離までの入射光の光スポットの位置を検出できる。
【解決手段】メモリ部25における記憶部の画素データが飽和した場合には、以後のフレームにおいて、発光素子11の発光停止と、固体撮像素子17の露光停止と、メモリ部25への画素データの転送停止とのうち、少なくとも何れか一つを行うようにしている。したがって、画素データが飽和したことによる受光強度分布形状の崩れを1つのフレーム分の最小限に止め、メモリ部25において画素データが飽和した場合でも受光強度分布形状に基づく光スポット位置の演算が可能になる。その結果、メモリ部25のビット数を増大させることなく、近距離から遠距離までの入射光の光スポット位置を検出できる。また、メモリ部25に対する画素データの不要な積算を行わないので、メモリ部25における1画素当たりのビット数の増大を防止することができる。
(もっと読む)
空中の水滴および氷晶の機内検出のための装置および方法
【課題】照射部および検出部を含む、空中の液体の水滴および氷晶を光学的に検出して区別する装置を提供する。
【解決手段】照射部は、円偏光した照射ビームを出力する。検出部は、照射ビームに応答して、雲の中の水分から円偏光した後方散乱光を受け取る。円偏光した後方散乱光に円偏光器を通過させて、直線偏光した後方散乱光に変換し、これを2つの成分に分割する。任意選択で、2つの成分はそれぞれ、あらゆる漏れ型の直交偏光を除去するためのさらなる直線偏光を受ける。次いで、2つの成分を光学的に検出し、その結果得られる検出信号を使用して、空中の氷晶および/または水滴の有無を反映する1つまたは複数のパラメータを計算する。
(もっと読む)
追尾式レーザ干渉計
【課題】追尾式レーザ干渉計の追尾速度を高速化する。
【解決手段】固定配設された回転中心の回りを回動するように配置されたキャリッジ22上に設けられたレーザ干渉計24からレトロリフレクタ10に向けてレーザビームを照射し、戻り方向に反射されたレーザビームの干渉を利用してレトロリフレクタの変位を検出すると共に、レーザビームの光軸の位置の変化として検出される追尾偏差を用いてトラッキングを行なうようにキャリッジの回動を制御する追尾式レーザ干渉計において、キャリッジの相対角変位Θaに変換係数Kmのノミナル値Kmnを乗じた信号と追尾偏差ΔLfを加算してレトロリフレクタの変位の推定値Lc*を算出する手段と、レトロリフレクタの変位の推定値Lc*に0<K<1なる補償ゲインKfを乗じ、更にこれを微分してキャリッジの目標速度の補償信号Vfを生成する手段と、追尾偏差ΔLfに追尾制御系のゲインKpを乗じた信号に補償信号Vfを加算してキャリッジの目標速度Varを生成する手段とを持つサーボ機構を備える。
(もっと読む)
光検出装置
【課題】より高精度の物体検出をすることができるレーダ装置において好適に用いられ得る光検出装置を提供する。
【解決手段】光検出装置1は、M個の受光部101〜10M,選択部20,加算部30および制御部40を備える。各受光部10mは、フォトダイオードPD,トランスインピーダンスアンプ11,トランスコンダクタンスアンプ12,容量素子C,第1スイッチSW1および第2スイッチSW2を含む。トランスインピーダンスアンプ11はアンプA11および帰還抵抗器R11を有する。第1スイッチSW1は、トランスインピーダンスアンプ11の接地端子と第1接地用共通配線W1との間に設けられる。第2スイッチSW2は、トランスインピーダンスアンプ11の接地端子と第2接地用共通配線W2との間に設けられる。
(もっと読む)
光学式変位計
【課題】
1次元イメージセンサに2つの出力を設けた時に発生する増幅回路のオフセット量及びゲインの個体ばらつきの影響を低減した光学式変位計を提供することを目的とする。
【解決手段】
1次元イメージセンサ20の奇数画素20aと偶数画素20bの受光量を異なる出力ポートから個別に読み出して、異なる増幅回路15a、15bによって独立して増幅する。増幅された奇数画素20a、偶数画素20bの2つの受光量から形成された2つの受光量分布から、各々受光量のピークとなる画素位置を算出する。算出された2つの画素位置に基づいて、測定対象物までの距離を算出する。。
(もっと読む)
光検出装置、光検出方法および車両
【課題】背景光の光量レベルが高い環境または被検物からの光が弱い環境下でも、被検物からの光を高精度に検出する。
【解決手段】所定周波数で点灯消灯するパルス光を被検物に照射し、パルス光が照射される被検物を含む領域を撮像する。所定周波数の1以上の整数倍の複数の周波数の信号を含む複数の参照信号を生成し、生成された複数の参照信号を用いて、撮像信号を同期検波する。同期検波された複数の検波信号を加算し、加算した同期検波信号に基づいて、ノイズ成分を除去した計測信号を出力する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】距離画像および輝度画像の双方を生成するに際し、高解像度の輝度画像を生成できるようにする。
【解決手段】測距光照射部3が、所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が被写体による測距光の反射光を受光し、受光光量に応じた信号を出力する。この際、撮像制御部19が、所定数の受光素子からなる受光素子単位にて、測距光の変調周期における互いに異なる複数の位相において反射光をそれぞれ受光して、複数の位相毎に信号を取得するようCCD13を制御する。距離画像生成部31が、複数の位相毎の信号に基づいて、受光素子単位にて被写体までの距離を表す距離情報を算出し、距離情報を各画素の情報とする距離画像を生成する。輝度画像生成部32が、複数の位相毎の信号に基づいて、受光素子単位にて被写体の輝度を表す輝度情報を複数算出し、各輝度情報を各画素の情報とする輝度画像を生成する。
(もっと読む)
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の誤測距を防止する。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
(もっと読む)
計数装置、距離計、計数方法および距離計測方法
【課題】距離の測定精度を向上させる。
【解決手段】距離計は、半導体レーザ1に発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間とを交互に繰り返させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置8とを有する。計数装置8は、計数期間中の干渉波形の周期を測定し、測定結果から計数期間中の干渉波形の周期の度数分布を作成し、度数分布から干渉波形の周期の中央値を算出し、度数分布から、中央値の0.5倍以下である階級の度数の総和Nsと、中央値の1.5倍以上である階級の度数の総和Nwとを求め、これらの度数NsとNwに基づいて計数結果を補正する。
(もっと読む)
1 - 20 / 37
[ Back to top ]