
Fターム[5J084CA52]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | クロックパルス (60)
Fターム[5J084CA52]に分類される特許
1 - 20 / 60
信号処理装置
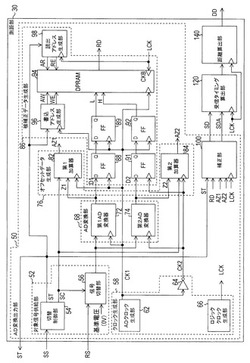
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
距離測定方法及びそのシステム

【課題】距離測定過程での演算速度と測定の正確性を高め、回路占用面積と消費電力を減少した、距離測定方法及びそのシステムの提供。
【解決手段】本発明の距離測定方法及びそのシステムは、光速度値と光信号が被測定物までを往復する時間値を利用して距離の演算を行い、前記光信号の発信/受信と同期するクロックマスクを利用して、このクロックマスク下の基準信号のサイクル数を取得して時間値を換算して得ると同時に、前記基準信号に基づいて生成された複数の位相シフト信号を利用して前述の時間値を修正し、かつ位相シフト信号数の増加に伴いエラーをさらに縮小して、正確な光信号が被測定物までを往復する時間値を取得することができ、且つ測定速度が速く、測定システムが占用する回路面積が小さいという利点がある。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
信号判定装置および信号判定方法
【課題】入力信号が有効か否かの判定を簡単に実現する。
【解決手段】信号判定装置10は、入力信号を2値化する2値化部100と、2値化部100の出力を入力とし、判定期間中の入力信号のランレングスを測定するランレングス測定部101と、ランレングス測定部101の測定結果から、判定期間中の入力信号に含まれるノイズの度数分布を幾何分布と仮定した分布を求め、求めた分布とランレングス測定部101の測定結果から得られるランレングスの分布とを比較することにより、入力信号が有効か否かを判定する判定手段(確率算出部103、ノイズ度数算出部104、有効性判定部105)とを備える。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ及び制御方法
【課題】位相方式の距離センサにおいて、測定対象物までの実際の距離に応じた適切な距離レンジの切り替えの実現。
【解決手段】距離センサ100は、発振器2が生成した基準クロック信号F1を1/N分周する分周器4の分周比Nと、PLL8が生成した参照クロック信号F2を1/N分周する分周器10の分周比Nとを可変として構成される。そして、距離計測を行う際には、先ず、分周器4,10それぞれの分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4,10それぞれの分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
距離測定装置
【課題】アイセーフ波長のレーザ光を用いて低コストかつ高精度に距離を測定する。
【解決手段】レーザ光源24からのアイセーフ波長のレーザ光は、ポリゴンミラー21により走査されつつ測定対象に照射される。測定対象からの光はGLV32へと導かれ、GLV32からの回折光が光検出器35にて受光される。光検出器35は単一のフォトダイオードを備える。GLV32からは可干渉性の強い光のみが光検出器35へと導かれるため、レーザ光に由来する光のみが光検出器35にて検出される。GLV32において回折光を出射する領域を移動することにより、レーザ光に由来する光の入射位置が求められる。これにより、背景光の影響を受けることなく精度よく距離を測定することができる。また、単一のフォトダイオードを用いることにより、アイセーフ波長の光を低コストにて検出することができる。
(もっと読む)
光波距離測定装置
【課題】測定対象物の画像データと画素毎の距離データが得られる様にした光波距離測定装置を提供する。
【解決手段】測距光を変調して測定対象物に照射する投光部1と、測定対象物からの反射測距光を受光する受光部6と、受光信号を記憶する信号処理部7と、前記受光部及び前記信号処理部を制御して受光信号を取得する信号処理制御9と、受光信号に基づき測定対象物迄の距離を演算する演算処理器8とを有し、前記受光部は、所定の配列で配置された複数の画素11と、各画素からの受光信号を蓄積し、1周期を所定数分割した内の1分割分の受光量を検出し、検出結果を時系列に出力する出力部15とを有し、前記信号処理制御部は、一周波毎に受光量を検出する分割部分の位置を順次変更し、前記演算処理器は、少なくとも1周期分の検出結果に基づき一周波分の波形を演算すると共に、照射した前記測距光に対する前記波形の位相差を求め、該位相差より距離を演算する。
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】少ない計算量で計数誤差を補正する。
【解決手段】振動周波数計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7と、計数装置7の計数結果から物体10の物理量を求める演算装置8とを有する。計数装置7は、一定の計数期間における干渉波形の周期を測定し、この測定結果から干渉波形の周期の平均値を代表値として算出し、測定した1周期を1つの信号として計数すると共に、測定した周期が代表値の(n+0.5)倍以上(n+1.5)倍未満の場合は、計数の結果にnを加算することを、計数期間中の周期の全測定結果について行う。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
光測距装置
【課題】人間の眼の保護を図りながら、測距動作を継続できる光測距装置を提供する。
【解決手段】測距モードとして、安全モードと高精度モードとを備える。前記安全モードは、被曝放出レベルが最大許容露光レベルMPEよりも小さくなる「レーザ製品の安全基準」(JIS C 6802)のクラス1に相当するモードである。一方、高精度モードは、安全モードに比べてレーザ投光頻度を上げたり、走査振幅を絞ったりするなどの設定により、被曝放出レベルが最大許容露光レベルより高い、安全基準のクラス3Rに相当するモードである。ここで、測距動作で得た距離のデータと反射光量のデータとから、至近距離に人間の眼が存在することが検出された場合、高精度モードによるレーザ放射を停止させ、安全モードでレーザ放射を行わせる。
(もっと読む)
物体を光学的に走査および測定する方法
レーザスキャナ10を用いて物体Oを光学的に走査および測定する方法Oは、標的周波数ω0で変調された発光ビーム18が、発光器17を用いて放射され、レーザスキャナ10の周辺部で物体Oから何らかの形で反射され、または他の形で散乱された受光ビーム20が、受光器21を用いて、多数のサンプルとして測定クロックfMとともに受け取られ、それぞれの場合、少なくとも物体Oからの距離dが、制御および評価デバイス22を用いて、複数の測定点Xに対する多数のサンプルの位相角Φから判定され、距離dを判定するために、時間的に隣接するサンプルの距離差Δdによって生じる位相シフトΔΦを補正して距離dを補正するという手順によって行われる。  (もっと読む)
(もっと読む)
計数装置、物理量センサ、計数方法および物理量計測方法
【課題】計数誤差を補正する。
【解決手段】張力・速度計測装置は、半導体レーザ1を発振させるレーザドライバ4と、半導体レーザ1の出力を電気信号に変換するフォトダイオード2の出力に含まれる干渉波形を数える計数装置7とを有する。計数装置7は、計数期間中の干渉波形の周期を測定し、この測定結果から計数期間中の干渉波形の周期の度数分布を作成し、この度数分布から、階級値と度数との積が最大となる階級値を干渉波形の周期の代表値T0とし、代表値T0の0.5倍未満である階級の度数の総和Nsと、代表値T0の(n+0.5)倍以上(n+1.5)倍未満である階級の度数の総和Nwnとを求め、これらの度数NsとNwnに基づいて計数結果を補正する
(もっと読む)
パルス光による光学式距離計
飛行時間測定に基づいた光学式距離計は、オブジェクト(70)に向ってパルス光を照射し、オブジェクトからの反射光を受信し、受信器はフォトンカウントモードで動作して検出されたフォトンに対してパルスを生成する。受信器上でフォトン検出の可変確率が存在し、且つ、コントローラ(370、380、390;365、470、475、380、390;570、580、590、390)は光レベルに基づいて、受信器のフォトン検出確率を制御する。光レベルに基づいて検出確率を制御することによって、光学部品を使用する経費を伴うことなく、受信器は増加したダイナミックレンジを有する。これは、検出確率が制御される間、受信器がフォトンカウントモードにあるので、非常に弱い信号を検出する間であっても適用することができる。光レベルは受信器自身の出力によって、或いは受信器の外部の別の検出器によって、表すことができる。 (もっと読む)
時間計測回路
【課題】TAC方式を使用する時間計測回路、またはTAC方式とパルスカウント方式を組み合わせた時間計測回路において、測定精度を向上させるとともに、デッドタイムのない回路構成を提供する。
【解決手段】入力信号Viの振幅の最大値を検出してトリガTRGを出力するピーク検出回路5と、測定開始信号Vgに応答して動作する3個以上の複数のアナログ信号発生部1〜4と、アナログ信号発生部1〜4の動作タイミングを制御する制御部6と、トリガTRGの出力時点におけるアナログ信号発生部の少なくとも1つの出力電圧を用いて、測定開始信号Vgの出力時刻を起点としたトリガTRGの出力時刻を算定する算定部7とを備えている。
(もっと読む)
レーザ測距装置
【課題】パルスのレーザ光を送信して目標物で反射したレーザ光を受信し、送信から受信までの経過時間から目標物までの距離を算出するレーザ測距装置において、より効率的な測距処理を可能にしたレーザ測距装置を提供する。
【解決手段】パルス毎に受信信号の最大ピーク値と送信から最大ピーク値に達するまでの時間をサンプリング周期の周期数として測定し、複数回の受信信号の最大ピーク値をそれぞれカウントした周期数が同じ数同士で積分し、最大の積算値が存在する周期数を導出し、この導出した周期数に相当する時間から目標物までの距離を演算する。最大ピーク値及び周期数の測定には高速に応答可能なアナログ回路を用いる。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中の物体であるウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の数を数える信号抽出部7と、信号抽出部7の計数結果に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
1 - 20 / 60
[ Back to top ]