
Fターム[5J084CA62]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コード(符号)、エンコーダ、デコーダ (29)
Fターム[5J084CA62]に分類される特許
1 - 20 / 29
情報取得装置、情報取得方法、及びタグ装置
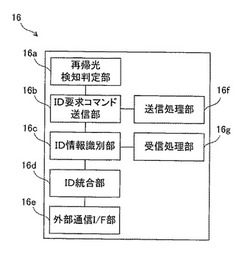
【課題】タグ装置の消費電力を低減することができる情報取得装置を提供すること。
【解決手段】情報取得装置は、光ビームを出射する出射部と、前記出射部から出射された光ビームが物体で反射した再帰光を受光する受光部と、前記受光部により前記再帰光が受光された場合に、前記物体から送信された情報信号を受信する受信部と、前記受信部により受信された情報信号に基づき、前記物体の識別情報を取得する取得部と、を備える。
(もっと読む)
距離画像生成装置および距離画像生成方法

【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
距離速度測定装置
【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
光符号変調パルスの相関処理方式
【課題】光符号変調パルスの相関処理方式におけるサイドローブ雑音を低減すること。
【解決手段】光周波数シフタ12により光ファイバ1のブリルアン周波数シフトと同程度ダウンシフトされた連続光と、光変調器3により相関符号系列信号発生器13からの相補相関符号変調信号で変調されたポンプ光とが光ファイバ1中で干渉して発生する音波によってブリルアン増幅された前記連続光の受信信号を処理する際、相補相関符号系列信号A1(t)及びその要素を交換したA1-(t)による応答信号RA1(t)及びRA1-(t)の差信号ΔRA1(t)にステップ応答関数h(t)の逆数g(t)を乗じて音波の減衰を補正したA1(t)g(t)とΔRA1(t)との相互相関処理をした結果と、同じく相補相関符号系列信号B1(t)及びB1-(t)による応答信号RB1(t)及びRB1-(t)の差信号ΔRB1(t)にg(t)を乗じたB1(t)g(t)とΔRB1(t)との相互相関処理をした結果を合成する。
(もっと読む)
送受信信号相関検出装置及び距離測定装置
【課題】カットオフ周波数を適切に設定して、受信信号の2値化の際のコード認識率の低下を抑制して、高い相関値のピークを得る。
【解決手段】PNコード発生回路22で発生したPNコードに応じてレーザ光源26を駆動して光パルスを射出し、目標対象物で反射した反射光パルスをフォトダイオード32で受光して受信信号を出力する。バンドパスフィルタ34を通過した受信信号はマイナス方向へシフトされ、エンコーダ36で2値化され、信号処理部40で、相関値がピークとなるPNコードと受信信号との位相差に基づいて、目標対象物までの距離を算出する。バンドパスフィルタ34のローカットオフ周波数の下限を、受信信号が定常状態となるまでの時間が受信信号の1周期より小さくなる周波数とし、上限を、受信信号のピーク値からパルスひずみの相対量を減算した値が、エンコーダ36の閾値と雑音成分の信号レベルとの和より大きくなる周波数とする。
(もっと読む)
信号処理装置、及び走査式測距装置
【課題】走査式測距装置と被測定物との間に障害物が存在する場合であっても、被測定物に対する距離を正確に算出可能な走査式測距装置を提供する。
【解決手段】
走査部で周期的に偏向走査されたパルス状の測定光に対応して、受光部で検出された被測定物からの反射光に対応する反射信号を微分する微分処理部と、一次微分された一次微分反射信号の立上り時期を基準に当該一次微分反射信号の重心位置を算出し、当該重心位置に対応する時期を反射光の検出時期として求め、測定光の出力時期と当該反射光の検出時期との時間差に基づいて被測定物までの距離を算出して出力する演算部と、微分処理部により反射信号が一次微分された一次微分反射信号の立上り及び立下り特性と、反射信号が二次微分された二次微分反射信号の立上り特性に基づいて、反射光が複数の被測定物からの反射光が重畳した反射光であるか否かを判定する波形判定部を備えている。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
レーザ味方識別システム
【課題】本発明の課題は、複雑な交戦状況下において隊員が目視にて瞬時に味方部隊を識別することができ、味方部隊に対する誤射を未然に防止するためのレーザ味方識別システムを提供することにある。
【解決手段】本発明は、銃12に装着され、レーザパルス列によるコード情報を含むIFFレーザビームが発射されるIFFレーザ送信装置13と、IFFレーザ送信装置13からのIFFレーザビームが受光され、レーザパルス列によるコード情報を解読して発光器を所定時間発光する味方識別器18とを具備することを特徴とする。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、より高い時間精度で距離測定方法を提供する。
【解決手段】発光時点調整部20は、時間ベースユニット38で二つの周波数をベースにして高分解能の時間ベースを提供し、例えば60.975psの倍数で光パルスの発光を遅らせる。更に発光時点調整部20は発光時間微調整ユニット40を有し、多数の個別測定値を使って例えばガウス形状の発光パターンを形成することにより、実際に生じている発光時間遅延を、物理的に可能な発光時点と比べて、属する受光パターンの重心により理論的に任意に細分化する。即ち、時間ベースユニット38が直接的に分解能を変更し、その分解能が発光時間微調整ユニット40により、統計的な重心シフトを介して間接的に更に細分化される。このように高分解能にした時間区分で送られた光パルスが受光され、A/D変換部36でデジタル化され、ヒストグラムユニット42でヒストグラム解析が行われる。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、高い時間的精度で距離測定するための、コスト的に有利な可能性を提供する。
【解決手段】10MHzのマスターサイクルから、周波数f1=400MHzないし周波数f2=410MHzの分割サイクルをつくる。差分周期の任意の倍数をつくり出すために、時間ベースユニットが、周波数f2のn番目の周期及び周波数f1のm番目の周期から成るペアを選ぶ。各ペアの位置はマスターサイクルに対して固定されており、例えばn=2及びm=6が4/f2+6ΔTの時間インターバルに相当し、1/f2=41ΔTである。そこでは、100ns経過して同期が起きるたびにカウンタがリセットされ、ペアの番号付けが最初から始まる。二つの周波数f1及び周波数f2に基づいて、検知区分よりもはるかに細かい時間ベースを使用できる。
(もっと読む)
三次元及び距離の面間推定を与えるための方法及びシステム
本発明は、シーン内の1又は複数の被写体の3−A(三次元の)被写体外形の面間推定及び/又は距離の面間推定を行うシステム、装置及び方法に関する。方法は、(a)特徴タイプを生じさせる、各特徴タイプが固有の二次元構造により識別可能である所定の明確な特徴タイプの有限セットを準備すること、(b)特徴タイプの多数の外観を含む符号化光パターンを準備すること、(c)軸方向に変化する強度を有する符号化光パターンを、第1の面を生じさせまた第2の面を生じさせる少なくとも2つの面を有するシーン内の1又は複数の被写体に投射すること、(d)被写体に投射された投射符号化光パターンを有する被写体の2−D(二次元の)画像を捕捉し、これにより、反射された特徴タイプを含む、捕捉された2−D画像を生じさせること、(e)2−D捕捉画像の強度値を決定し、決定された強度値を生じさせること、及び(f)決定された強度値に基づいてシーン内の1又は複数の被写体の3−D被写体外形面間推定及び/又は距離の面間推定を行うことを含む。 (もっと読む)
バックグランド放射光の抑制に有利なTOF領域
放射光の飛行時間を測定する方法は、第1の変調信号に応じて変調光(51)を放出するステップと、シーン(55)に変調光(51)を投影するステップと、放射光を受光するステップとを含み、受光した上記放射光は、少なくとも、シーン(55)によって反射された変調光を含んでいる。受光した上記放射光(26、27)は、放射光により誘起する電気信号に変換される。上記放射光により誘起する電気信号は第2の変調光と混合され、従って、混合信号を生成する。混合信号は、積分され、従って、積分信号を生成する。上記積分信号が閾値(Vref)を超えるとき、電荷は積分信号に注入される。上記方法は、第1及び第2の変調信号の変化を時間内に1または複数の期間で適合するステップと、時間内の1または複数の期間で積分信号を測定するステップとを含み、従って、少なくとも1つのTOFペアの信号の差(62)を取得するステップを含んでいる。上記測定するステップは、単一の検出器ノード(38)を使用するステップと、TOFペアの信号の差(62)を取得するために、メモリエレメント(25)を連結させるステップを含んでいる。上記方法は、更に、放射光の飛行時間を決定するための1または複数のTOFペアの信号の差を使用するステップを含む。  (もっと読む)
(もっと読む)
データセンタのラック内に設置されたコンピューティング機器への位置情報の提供
【課題】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供すること。
【解決手段】データセンタのラック内に設置されたコンピューティング機器に位置情報を提供する方法、装置、および製品であって、投影モジュールによって、データセンタのラックの上の少なくとも1つの反射面上の複数の基準点に複数の光信号を投影することであって、各光信号は、基準点のうちの1つに対応し、その対応する基準点の基準点位置情報を符号化する、投影することと、ラックのうちの1つに取り付けられた位置検出モジュールによって、反射面から反射された光信号のうちの1つまたは複数を検出することと、位置検出モジュールによって、基準点位置情報に従ってラック位置情報を判定することと、位置検出モジュールによって、位置検出モジュールが取り付けられるラックの位置を識別するのにラック位置情報を使用する位置情報コンシューマにラック位置情報を提供することとを含む方法、装置、および製品を開示する。
(もっと読む)
距離検知システムおよび方法
レーザ距離センサを使用する距離測定システムおよび方法は、種々の応用において有用性を有している。本発明の一観点に従えば、レーザ距離センサは、短いベースラインで正確な距離測定値を獲得することができる。 (もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、強度変調され、且つ、開始位相がそれぞれ異なる第1変調光12A〜第4変調光12Dをシリーズに出射する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。発光手段14は、発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28とを有し、さらに、発光制御部28は、第1変調光12A〜第4変調光12Dの各開始位相を制御する開始位相制御部64を有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
光波測距方式及び測距装置
【課題】測距精度を向上させると共に測距可能な距離を伸ばすことができ、安価に測距装置を構成することが可能となる光波測距方式及び測距装置を提供する。
【解決手段】第一のPN符号により符号変調された光波を、測距ターゲットに対して発信すると共に第一のPN符号と同一符号で、かつ微小に異なる周波数を有する第二のPN符号を生成して第一のPN符号と第二のPN符号との相関値を低周波の波形信号へと変換し、測距ターゲットにより反射された光波を第二のPN符号を印加した受光素子によって受信し、積分処理して低周波の波形信号へと変換し、送信側相関信号と受信側相関信号との位相差を求め、その位相差から測距ターゲットまでの距離を算出する。
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28と、第1変調光12A〜第4変調光12Dの基準時から照射開始時までの時間的長さを制御する開始時間制御部64とを有する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
1 - 20 / 29
[ Back to top ]