
Fターム[5J084EA12]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 補正 (152) | 温度補正 (40)
Fターム[5J084EA12]に分類される特許
1 - 20 / 40
距離計測装置
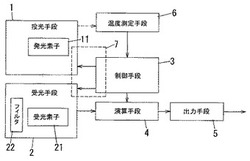
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
光学装置

【課題】光路上に配置した複数のミラーのうち角度ズレを生じたミラーを容易に特定できる光学装置を提供することを課題とする。
【解決手段】実施形態に係る光学装置は、光路上に配置した複数のミラーと、各ミラーを保持した複数のミラーホルダーと、各ミラーホルダーに設けられた反射面と、を有する。各反射面は、光路と直交する面に沿って各ミラーホルダーに取り付けられている。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
光学式測距装置および電子機器
【課題】高耐熱かつ高精度の光学式測距装置を提供する。
【解決手段】発光レンズ5および受光レンズ6を保持した、金属からなるレンズフレーム11を遮光性樹脂からなる2次モールド9および3次モールド10の間に保持する。レンズフレーム11は、表面および裏面に凹凸構造11bを有している。発光レンズ5および受光レンズ6とレンズフレーム11との密着力が大幅に向上するので、発光レンズ5および受光レンズ6とレンズフレーム11との滑りを防止することができる。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
距離測定方法および距離測定装置
【課題】簡易な構成で、物標までの距離の測定精度を向上可能な距離測定方法および距離測定装置を提供する。
【解決手段】発光トリガ信号をきっかけに発光部から照射されたレーザ光の物標からの反射光を受光する受光部は、発光部からレーザ光が照射されるタイミングで、出力する電気信号に変動が生じるように構成されている。制御部では、測定部からトリガ信号が出力されてから、測定部にて検出される電気信号に最初に生じる電気信号の変動を第1変動信号、二番目に生じる変動を第2変動信号、第1変動信号が生じるまでの期間を第1期間、第2変動信号が生じるまでの期間を第2期間として、第1期間および第2期間の差を第1の距離測定時間として測定する(S110−S175)。続いて、第1の距離測定時間と予め定められた距離係数とを乗算した値を物標までの距離として算出する(S180)。
(もっと読む)
光波距離計
【課題】温度位相ドリフトによる測定誤差を低減させて測距精度を向上させた光波距離計の提供。
【解決手段】複数の主変調周波数と傍変調周波数による変調光をそれぞれ出射する第1及び第2の発光素子と、両発光素子から出射された光を受光する第1及び第2の受光素子と、第1の受光素子に接続された第1の周波数変換器群(42、44)と、第2の受光素子に接続された第2の周波数変換器群(50、52)と、異なる複数の局部発振信号の組合せを複数生成して前記各周波数変換器群に入力する複数の局部発振信号生成器(100、101)を備え、目標反射物を往復する測距光路及び第1から第3の参照光路を通る光と前記周波数変換器群に入力される局部発生信号の複数の組合せから、異なる位相ドリフトの測距値を複数が算出して、それら平均値から目標対象物までの距離を算出する。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
光学式測距装置
【課題】簡単な構造にて、周囲温度の変化と自己発熱とによる測距精度の低下を防ぐことができる光学式測距装置を提供する。
【解決手段】測距対象物までの距離を測定しているときの温度センサ25によって検出された温度と、上記距離を測定していないときの温度センサ25によって検出された温度との変化量に基づいて検出値を補正した後に三角測距法により測距対象物までの距離を算出する受光素子12と、発光レンズ14及び受光レンズ15の間の距離を制御するレンズ間距離制御部18とを備えており、レンズ間距離制御部18は、測距装置10の周囲温度の変化によって生じる測距装置10の温度の変化に対する、発光レンズ14と受光レンズ15との間の距離の変動量と、測距装置10の自己発熱によって生じる測距装置10の温度の変化に対する当該距離の変動量とを近づけるように、当該距離を制御する。
(もっと読む)
光位相差検出式の物体検知センサ
【課題】
電気回路の温度ドリフト等による距離測定値が変動を補正し、数センチ単位の距離変動を検出することのできる光位相差検出式の物体検知センサを提供すること。
【解決手段】
検知領域に向けて検出光を投光する投光素子と、検知領域からの反射光を受光して受光信号を生成する受光素子と、投光した光と、受光した光との位相差を検出し距離計算をおこなう距離算出手段と、検知領域内に物体が有ると判定する判定手段を備えた光位相差検出式の物体検知センサに、距離算出手段の状態を監視し続け、判定手段からの出力が存在していない時にのみ、距離算出結果に基づき判定手段の判定値を補正する状態補正手段を加え、自動的に背景(床面等)までの距離測定結果の補正、もしくは、検出閾値の補正を実行させるようにした。
(もっと読む)
飛行時間撮像装置
【課題】飛行時間測定を使用した深度図を生成するための改良された解法に関し、特に飛行時間撮像装置およびより精度良い飛行時間撮像方法を提供する。
【解決手段】飛行時間撮像装置6のセンサ5の画素アレイ内の伝播遅延を考慮した、深度修正プロファイルは測定された深度図に応用される。前記深度修正プロファイルは、2つのn次元多項式の重ね合わせである。
(もっと読む)
センサー、その動作方法、及びセンサーを含むデータ処理システム
【課題】光信号の復調過程で発生する光電子の損失を補償して距離情報を正確に測定するセンサーの動作方法を提供する。
【解決手段】第1区間T1と第2区間T2とをそれぞれ有する複数のパケットP〜NPの各第1区間において、光源から出力された変調された光信号を復調するために、相異なる位相を有する複数のオシレーション信号Pa、Pbのそれぞれを複数のフォトゲートのそれぞれに供給する段階と、前記複数のパケットの各第2区間において、前記光源をディセーブルさせ、DC電圧を前記複数のフォトゲートのそれぞれに供給する段階と、を含む。
(もっと読む)
光測距装置
【課題】レーザ安全の基準を満たす様に光測距装置を最適に制御する。
【解決手段】光測距装置は、光反射面を有する可動部が揺動することで光反射面に入射される光を光走査できる光走査部と、可動部を揺動させる駆動信号を、可動部が有する共振周波数に合わせて設定された駆動周波数で、光走査部に供給し可動部を揺動駆動する走査駆動部と、光反射面に向かってレーザ光を投光する光源部と、光反射面で反射走査されたレーザ光が物体により反射された反射光を受光する受光部と、レーザ光の各照射位置間の距離が所定値以上になる様に設定された、レーザ光の投光タイミングを光源部に指令する光源制御部と、レーザ光の投光及び受光タイミングに基づいて物体の距離を計測する測距部と、設定されている駆動周波数と投光タイミングとを共振周波数に合わせて変更する変更手段と、を備える。
(もっと読む)
光波距離計
【課題】測定時間を短縮するとともに、電気部品の温度位相ドリフトを低減させた光波距離計を提供する。
【解決手段】複数の主変調周波数(F1、F2)で変調された光を出射する第1の発光素子(13)と、各主変調周波数それぞれに近接した傍変調周波数(F1−Δf1、F2−Δf2)で変調された光を出射する第2の発光素子(14)と、両発光素子から出射された光を受光する第1及び第2の受光素子(40、48)と、第1の受光素子に接続された第1の周波数変換器群(42、44)と、第2の受光素子に接続された第2の周波数変換器群(50、52)とを備える。第1の発光素子から出射された光は2つに分けられ、一方は目標反射物(22)までを往復する測距光路(23)を経て第1の受光素子に入射し、他方は第1の参照光路(26)を経て第2の受光素子に入射し、第2の発光素子から出射された光は2つに分けられ、一方は第2の参照光路(31)を経て第2の受光素子に入射し、他方は第3の参照光路(29)を経て第1の受光素子に入射する。
(もっと読む)
パルス光による光学式距離計
飛行時間測定に基づいた光学式距離計は、オブジェクト(70)に向ってパルス光を照射し、オブジェクトからの反射光を受信し、受信器はフォトンカウントモードで動作して検出されたフォトンに対してパルスを生成する。受信器上でフォトン検出の可変確率が存在し、且つ、コントローラ(370、380、390;365、470、475、380、390;570、580、590、390)は光レベルに基づいて、受信器のフォトン検出確率を制御する。光レベルに基づいて検出確率を制御することによって、光学部品を使用する経費を伴うことなく、受信器は増加したダイナミックレンジを有する。これは、検出確率が制御される間、受信器がフォトンカウントモードにあるので、非常に弱い信号を検出する間であっても適用することができる。光レベルは受信器自身の出力によって、或いは受信器の外部の別の検出器によって、表すことができる。 (もっと読む)
光測距装置
【課題】素子温度の変化に対して光検出器の増倍率を精度よく安定化させることができ、以って、高い測距精度を安定して維持できる光測距装置を提供する。
【解決手段】測距用光源2からのレーザ光を、ビームスプリッタ6,7を介して発光モニタ用光検出器(フォトダイオードPD)9に受光させ、更に、ビームスプリッタ6,7及び反射ミラー11を介して測距用光検出器(アバランシェフォトダイオードAPD)4に受光させる。そして、発光モニタ用光検出器(PD)9の出力Voと測距用光検出器(APD)4の出力Vxとの比(増倍率)Mxを求め、前記比(増倍率)Mxが目標値Mに近づくように、測距用光検出器(APD)4のバイアス電圧を補正する。
(もっと読む)
光波距離測定方法及び光波距離測定装置
【課題】製造工程に於ける受光回路の電気的な調整を省略でき、広い温度範囲に亘って位相変化の少ない受光回路とすることなく、又経時変化に対する電子部品の劣化を考慮することなく、高精度の測距を可能とする。
【解決手段】光源6からの光を測定対象物2に向けて照射し、該測定対象物で反射された反射光を受光部8で受光し、前記光源からの光を内部光路11を介して内部光として前記受光部により受光し、該受光部の反射光、前記内部光の受光結果に基づき前記測定対象物迄の距離を測定する光波距離測定に於いて、前記内部光に基づき補正情報を取得し、取得された該補正情報を記憶し、前記反射光と前記内部光とに基づき前記補正情報から補正値を取得し、該補正値と、前記受光部の前記反射光、前記内部光の受光結果とにより距離を演算する。
(もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
光学式距離測定システム
【課題】簡易な構成により高精度の測定を行うことができる光学式距離測定システムを提供すること。
【解決手段】光学式距離測定システム1は、放射用光ファイバ41の他端側の放射端41Eから放射した光をワークWに向けて出射するとともに、ワークWにより反射された光を受光用光ファイバ42の他端側の受光端42Eに入射する光学系部品群45と、この光学系部品群45が固定された筐体Cと、を備える。光学式距離測定システム1は、さらに、光源部31から放射した光を、光学系部品群45を迂回して光検出部32に入射する補正用光ファイバ43をさらに備え、この補正用光ファイバ43の少なくとも一部のファイバコイル43Cは、筐体Cに接して設けられる。演算装置6は、補正用光ファイバ43の伸縮量に基づいて測定距離の補正を行う。
(もっと読む)
1 - 20 / 40
[ Back to top ]