
Fターム[5L096AA09]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 3次元画像 (415)
Fターム[5L096AA09]に分類される特許
41 - 60 / 415
車両用白線認識装置
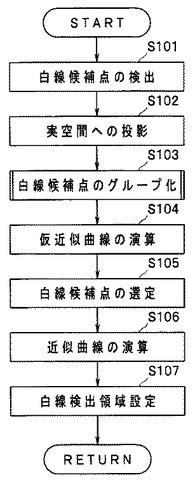
【課題】遠方で左右の白線候補点が入り交じった状態においても各候補点を左右に正しく分離することができ、遠方まで白線を精度よく認識することができる車両用白線認識装置を提供する。
【解決手段】ステレオ画像認識装置4は、左右の白線検出領域A毎に、互いに隣接する白線候補点Pdの連続性を順次判定し、予め設定された連続性を有して所定数以上連続する白線候補点の点群を第1のグループとしてグループ化し、グループ化された白線候補点のみを用いて仮白線近似線Ltを演算する。そして、左右の仮白線近似線Ltを基準とする候補点選定領域Asをそれぞれ設定し、左右の白線検出領域Aで検出した全ての白線候補点Pdの中から各候補点選定呂域As内に存在する白線候補点Pdを最終的な白線候補点Pとしてそれぞれ選定する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム

【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
地図データ生成装置および走行支援装置
【課題】移動物体を含まない3次元地図データを生成できるようにする。
【解決手段】プローブ車両2の走行に伴って収集された、画像データ、測距データおよび測位データを含むプローブデータを地図データ生成装置10の記憶媒体に蓄積記憶させ、この記憶媒体から、同一地点より同一の場所を撮影した撮影画像を含む複数のプローブデータを抽出し、当該同一の場所を撮影した撮影画像の特定画素(X、Y)の画素データの分散値に基づいて、移動物体を含まない撮影画像を特定し、移動物体を含まない撮影画像を含むプローブデータに基づいて移動物体を含まない3次元の地物図データを生成する(S202)。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測方法
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
物体の姿勢を求める方法及びシステム
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】物体の位置及び姿勢の真値と初期値として入力される位置及び姿勢の概略値とのずれに関わらず、ロバストに物体の位置及び姿勢を算出する。
【解決手段】検出部120は、基準位置姿勢において視点から観測される三次元形状モデル上の幾何特徴を基準幾何特徴として検出する。類似度算出部140は、参照位置姿勢において視点から観測される三次元形状モデル上の基準幾何特徴に対応する幾何特徴である参照幾何特徴を探索し、基準幾何特徴と参照幾何特徴との類似度を算出する。評価値算出部150は、類似度に基づいて、基準幾何特徴と参照幾何特徴との対応付けに係る評価値を算出する。
(もっと読む)
特徴検出装置、特徴検出方法、およびそのプログラム
【課題】 複数のカメラそれぞれで過去のフレーム結果と比較することで精度よく過去のフレームの結果を引継ぎ、特徴検出処理の処理負荷を低減する。
【解決手段】 ステレオ撮像した第1の映像と第2の映像からマーカを検出する探索ラインを設定し、探索ラインに沿って、第1の映像と第2の映像の両方の現在のフレームからマーカを検出し、フレームから検出したマーカの位置をマーカ情報として記録し、検出中に、検出中のフレームから検出したマーカの位置と、マーカ情報に基づく過去のフレームから検出したマーカの位置とが、予め設定された閾値以内であるか否かを判定し、閾値以内であると判定された数が、予め設定された個数以上であるか否かを判定し、個数以上であると判定された場合に、マーカの検出を中断し、過去のフレームのマーカ情報を現在のフレームのマーカ情報として記録する。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
情報処理装置、情報処理システム及び情報処理方法
【課題】距離画像のノイズに影響を受けにくく、かつ高精度なモデルフィッティングを行うことを目的とする。
【解決手段】物体の幾何的特徴を表す3次元モデルのデータを保存する3次元モデル保存部210と、物体を撮像した2次元画像を入力する2次元画像入力部220と、物体を撮像した距離画像を入力する距離画像入力部230と、2次元画像入力部220から入力された2次元画像から画像特徴を検出する画像特徴検出部250と、距離画像入力部230から入力された距離画像から画像特徴に対応する3次元座標を算出する画像特徴3次元情報算出部260と、画像特徴の3次元座標と3次元モデルとを照合するモデル照合部270とを備える。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
特定領域選択装置、特定領域選択方法及びプログラム
【課題】有用な特定領域を、視点における偏りがないように選択する。
【解決手段】学習装置200は、対象物体上の特定領域を複数選択し、複数の特定領域の夫々に関する検出手段を学習する。また、学習装置200は、複数の特定領域から特定領域の組み合わせによる領域組を生成し、検出手段及び領域組に基づいて対象物体の認識を行い、認識結果に基づいて新規の特定領域を追加する。そして、学習装置200は、新規の特定領域が追加された場合、新規の特定領域に関する検出手段を更に学習する。
(もっと読む)
表面が変化する対象物を3次元デジタル化する方法
【課題】表面が変化する対象物を3次元デジタル化する方法を提供する。
【解決手段】対象物4の複数の部分的表面を示す複数のカメラ画像を撮影して統合して、対象物4の部分的表面の3次元座標を決定する。複数のカメラ画像は、それぞれの端部において互いに重なり合う。マッチング法により対象物4の部分的表面の3次元座標を照合して統合する。カメラ画像の各々をサブフレーム(1.1〜1.8,2.1〜2.9,3.1〜3.9)に分割する。複数のサブフレームは、それぞれの端部において互いに重なり合い、隣接するカメラ画像に含まれるサブフレームに重複する。サブフレーム(1.1〜3.9)に対して、カメラ画像からそのサブフレームに関連する3次元座標を割り当てる。マッチング法によりサブフレーム(1.1〜3.9)の3次元座標を照合して統合する。この方法を数回繰り返して実行する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】相互のズレが画像内で不均一な複数の画像について算出される類似度を向上させる。
【解決手段】画像処理装置であって、第1と第2の画像とを取得する取得手段と、複数の部位で前記第2の画像を局所的に変形した派生画像の画像データを生成する生成手段と、前記第1の画像と前記派生画像との画像データに基づいたパターンマッチング演算によって、前記第1と前記第2の画像との類似度を算出する算出手段とを備える。そして、画素座標が互いに対応する画素として、前記第1の画像の注目画素と、前記第2の画像の対応画素と、前記派生画像の派生対応画素とを定義したとき、前記生成手段は、前記注目画素に対して、前記対応画素を空間的に内包する内包領域を前記第2の画像において設定する手段と、前記注目画素の画素値と、前記内包領域内の複数の画素の画素値との一致度に基づいて、前記派生対応画素の画素値の取得処理を行う画素値取得手段とを備える。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
(もっと読む)
車線推定装置
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
41 - 60 / 415
[ Back to top ]