
Fターム[5L096AA09]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 3次元画像 (415)
Fターム[5L096AA09]に分類される特許
61 - 80 / 415
車線推定装置
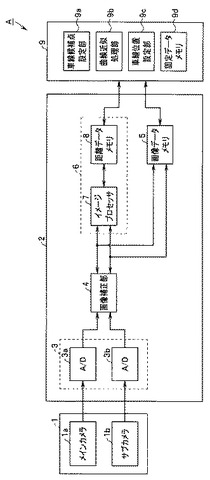
【課題】撮像手段で撮像した画像から、左右の走行車線の位置を推定する。
【解決手段】固定データメモリ9dには走行車線21L,21R間の標準レーン幅W1、二重白線の内側誘導線22間の狭レーン幅W2のデータが記憶されている。車線候補点設定部9aは撮像手段1で撮像した画像に基づいて走行レーンの左右の車線検出点Pを検出し、この車線検出点Pを起点として対向する車線側の各レーン幅W1,W2の位置と両レーン幅W1,W2間の位置に車線候補点G1〜G3を設定する。曲線近似処理部9bは車線検出点Pと車線候補点G1〜G3とに基づき求めた曲線近似式から走行レーンの左右に仮想線Lsを設定する。車線位置設定部9cは左右の仮想線Lsに対する各車線候補点G1〜G3の分散を求め、最小の分散を示す仮想線Lsに対応する車線種により左右の少なくとも一方の仮想線Lsの車線種を推定し、この車線種を基準に走行車線位置を確定する。
(もっと読む)
物体形状認識装置及び特徴点検出方法

【課題】境界上での特徴点検出処理を適正に行なうことにより、形状データから物体の形状を確実に認識できる物体形状認識装置が求められる。
【解決手段】本実施形態によれば、物体形状認識装置は、入力ユニットと、仮想面配置処理ユニットと、特徴点検出処理ユニットとを備えた構成である。入力ユニットは、物体の形状を表す形状データを入力する。仮想面配置処理ユニットは、前記形状データのデータ欠損部に仮想面を設定する。特徴点検出処理ユニットは、前記形状データ及び前記仮想面を使用して、前記物体の形状を構成するための特徴点を検出する。
(もっと読む)
ホームでの旅客巻き込み検知システム
【課題】駅ホーム上でホーム縁に沿って旅客が列車に巻き込まれる事故が生じた時に、これを高い精度で迅速かつ確実に自動的に検知することができるホームでの旅客巻き込み検知システムを提供する。
【解決手段】ホームでの旅客巻き込み検知システムは、列車が入線する駅ホームのホーム縁に沿って当該ホーム縁の上方位置に設置され、所定の時間間隔で設定された計測時刻毎に、それぞれ設定された検知エリアに係る検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像に係るデータを記憶するステイタスメモリ41と、ステイタスメモリに記憶された旅客像に係るデータに基づき前記旅客像の動きデータを取得し、動きデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客巻き込み状態が発生したと判定する処理手段56とを備える。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
情報処理装置、3次元位置算出方法及びプログラム
【課題】被写体の3次元位置を高速、かつ、安定的に算出する。
【解決手段】少なくとも2つの異なる視点から被写体150を撮像する撮像装置100、110で撮像された被写体150の各画像の色情報に基づいて各画像を複数の領域に分割する領域分割手段と、各画像上に設定された走査線と、領域分割手段で分割された各画像の領域の境界線と、の交点の近傍の領域に基づいて、交点の特徴量を算出する交点特徴量算出手段と、交点特徴量算出手段で算出された交点の特徴量に基づいて各画像の間の対応点を求める対応付け手段3000と、対応付け手段で求められた対応点の視点に対する3次元位置を算出する3次元位置算出手段4000と、を有する。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
3次元の制御ポイントを認識するための方法、及び、それらを用いるコンピュータ読み取り可能な記録媒体
【課題】より正確に制御ポイントを認識するための3次元制御ポイントを認識する方法、及び、当該方法を用いるコンピュータ読み取り可能な記録媒体を提供することを目的とする。
【解決手段】3次元制御ポイントを認識するための方法、または、当該方法を実行するための複数のプログラムコマンドを有するコンピュータ読み取り可能な記録媒体であって、当該方法は、画像取得装置によって取得された画像に対応する深さ情報要素を取得し、前記深さ情報要素に応じて、複数の3次元ブロックに対応する複数の3次元ブロック情報要素を生成し、前記深さ情報要素に応じて、少なくとも1の参照平面を生成し、前記3次元ブロック情報要素及び前記参照平面に応じて、少なくとも1の接続グループを生成し、前記接続グループから、前記画像取得装置に最も近い3次元ブロックを、制御ポイントとして、選択する、ことを特徴とする。
(もっと読む)
行動監視システム、行動監視プログラム、及び行動監視方法
【課題】監視対象が多数の場合であっても、監視対象の識別及び行動把握を容易に行うことができる行動監視システム、行動監視プログラム、及び行動監視方法を提供すること。
【解決手段】監視対象Tの光学像が入力される撮像部、監視対象Tと背景とを分離して監視対象Tの各特徴量を算出する特徴量算出部、特徴量から監視対象Tの各移動軌跡を算出する移動軌跡算出部、監視対象Tの所定部位の3次元位置座標を算出する位置座標算出部、所定部位の3次元位置座標に基づき、所定部位の移動速度及び移動方向を算出、所定部位の各動作軌跡を算出する動作軌跡算出部、特徴量及び3次元位置座標がステレオカメラ4間で類似する移動軌跡を繋げて、監視対象T毎の統合移動軌跡を生成する移動軌跡統合部、特徴量及び3次元位置座標がステレオカメラ4間で類似する動作軌跡に対して、監視対象T毎の統合動作軌跡を生成する動作軌跡統合部、を備えている。
(もっと読む)
対象体認識方法と装置
【課題】対象体の形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する場合に、対象体領域の外周部付近に不明瞭な形状部分が発生する可能性を低くする。
【解決手段】計測点から対象体上の各被計測点までの距離を計測することにより、または、対象体を撮像することにより、対象体の形状データを取得する形状データ取得ステップS1と、形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する領域生成ステップS2と、生成した対象体領域に対し修正処理を行う領域修正ステップS3とを有する。修正処理は、縮小処理および拡大処理の少なくとも一方を含む。対象体領域の外周部分または内周部分を処理対象領域とし、(A)縮小処理は、対象体領域内に含まれる処理対象領域を対象体領域から削除する処理であり、(B)拡大処理は、対象体領域外に位置するとともに該対象体領域に隣接する処理対象領域を対象体領域に統合する処理である。
(もっと読む)
ビデオゲーム装置
【課題】深度センサを備えたビデオゲーム装置において、深度センサに対するプレイヤの向きにかかわらずジェスチャを精度よく認識する。
【解決手段】プレイヤが存在する空間を撮像し、各画素ごとに深度情報を取得する深度センサと、前記撮像された画像を複数の区画に区分した上で前記深度情報の統計情報を区画毎に算出し、算出した前記統計情報に基づいてプレイヤのジェスチャを認識するジェスチャ認識部とを備える。
(もっと読む)
情報処理装置及びその処理方法
【課題】従来見分けることが難しかった、オクルージョンの発生による対象物に関する計測点の誤対応を減らすことで、計測点の対応付けを向上させる。
【解決手段】本発明の情報処理装置は、第1の位置に配置された対象物体から、複数の幾何特徴部分と複数の幾何特徴部分の各々における法線を取得し、第1の位置とは異なる第2の位置に配置された対象物体の形状モデルから、対象物体の複数の幾何特徴部分のそれぞれに対応する複数の法線とを取得し、対象物体と形状モデルとの対応する幾何特徴部分のそれぞれの組について、第1取得手段で取得された法線と、第1取得手段で取得された法線との方向の差を算出し、算出手段で算出した方向の差を相互に比較することにより、それぞれの幾何特徴部分におけるオクルージョンの発生の有無を判定する。
(もっと読む)
人物動作判定装置およびそのプログラム
【課題】本発明は、高い精度で人物の動作を判定できる人物動作判定装置を提供する。
【解決手段】人物動作判定装置1は、所定の動作を行う人物を撮影した撮影映像と、撮影映像の奥行情報とを用いて、人物の動作を判定して判定結果を出力するものであって、入力された撮影映像から特徴点を抽出して3次元特徴量を算出する特徴点抽出手段11と、3次元特徴量を追跡した4次元軌跡特徴量を算出する動き特徴量算出手段12と、4次元軌跡特徴量を用いて単位追跡時間ごとに動作を判定する動作判定手段13と、単位追跡時間ごとで判定回数が最大となる動作を判定結果として出力する判定平滑化手段14とを備える。
(もっと読む)
3次元形状検索装置、3次元形状検索方法、及びプログラム
【課題】 手書きの2次元画像から容易かつ高精度に、類似する3次元形状モデルを検索可能な3次元形状検索装置等を提供する。
【解決手段】 3次元形状検索装置1は、複数の3次元形状モデル50に関するデータベース5を有する。データベース5には、複数の3次元形状モデル50についてそれぞれ形状に関する少なくとも2種類の特徴量(例えば、輪郭線の画素連結性ヒストグラム及びシルエット画像の半径ヒストグラム)が予め記憶されている。ユーザにより任意の物体の手書き画像が入力されると、3次元形状検索装置1は、入力された手書き画像について上述の形状に関する少なくとも2種類の特徴量を抽出し、それらの特徴量に基づいて、データベース5から手書き画像に類似する3次元形状モデル50を検索し、検索結果を表示する。
(もっと読む)
3次元場面の分析
【課題】深さマップを処理する頑丈で効率的な方法を提供する。
【解決手段】データを処理する方法であって、ヒト類似形状を含むある場面の深さマップを受信するステップを有する。深さマップはその場面内の3次元(3D)結合構成要素を識別するために処理される。それぞれの結合構成要素は、相互に隣接し、かつ相互に次の深さ値を有する1組のピクセルからなる。別個の分離した第1と第2の結合構成要素は両方とも、ヒト類似形状に属すると識別される。そしてヒト類似形状の画像が第1と第2の結合構成要素を含んで生成される。
(もっと読む)
対象画像の追尾装置およびその動作制御方法
【目的】対象画像の追尾精度を向上させる。
【構成】立体撮像ディジタル・カメラを用いて被写体を撮像し,右目用画像と左目用画像とを周期的に得る。両方の画像で対象画像の検出処理が行われ(ステップ71),対象画像が検出されると(ステップ72でYES),右目用画像,左目用画像のうち,その後に撮像される画像については対象画像が検出された方の画像で対象物を検出するように設定される(ステップ73)。設定された方の画像で対象画像検出処理が行われる(ステップ74)。対象画像が検出されると(ステップ75でYES),対象画像らしさがしきい値未満のときには(ステップ76),両方の画像で対象画像の検出処理が行われ(ステップ77),対象画像らしさのスコアの高い方の画像を用いて対象画像を検出するように設定される(ステップ79)。
(もっと読む)
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
プログラム、情報記憶媒体及び物体認識システム
【課題】効率的に、かつ、正確に、奥行き関係を考慮した物体を認識する処理を行うことが可能な物体認識処理のプログラム、情報記憶媒体及び物体認識システムを提供すること。
【解決手段】物体に光を照射し、当該物体の反射光を受光することによって各画素の深度値を有する入力画像を取得し、入力画像の各画素の深度値に基づいて、入力画像において特定領域を設定し、特定領域において物体認識処理を行う。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
画像データ処理装置およびコンピュータプログラム
【課題】 大規模な野外フィールドにおける撮影画像の処理において、合理的な画像処理をすることによって、的確に飛翔体を抽出可能とする技術を提供する。
【解決手段】 複数のカメラが撮影した時系列画像データを重ね合わせて合成画像データを作成する合成画像作成手段と、 その合成画像作成手段にて作成された合成画像データの画素を二値化するための閾値を入力する二値化閾値入力手段と、 その二値化閾値入力手段にて入力された閾値を用いて二値化画像データを作成する二値化画像作成手段と、 その二値化画像作成手段にて作成された二値化画像データが使用可能かどうか確認するための二値化画像確認手段と、 その二値化画像確認手段にて使用可能と判断された二値化画像データおよび前記の時系列画像データを掛合せて掛合せ画像データを作成する掛合せ画像作成手段と、
を備えた移動体画像処理装置とする。
(もっと読む)
61 - 80 / 415
[ Back to top ]