
Fターム[5L096AA09]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 3次元画像 (415)
Fターム[5L096AA09]に分類される特許
81 - 100 / 415
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
画像処理装置及び画像処理プログラム

【課題】位相差解析を応用した画像処理により、ステレオ画像の第1画像内で指定される注目点の座標に対する第2画像内の対応点の座標の偏差を、高精度かつ比較的軽い演算負荷で算出する対応点探索処理を実現できること。
【解決手段】画像処理プロセッサ13は、プログラムモジュール131、133〜135を実行することにより、注目点の座標に対する対応点の座標の偏差の座標である対応点偏差座標のとり得る範囲を示す基準候補領域における、注目点に対応するエピポーラ線に相当する第1の直線に沿う一部のエピポーラ線相当領域を特定し、周波数成分及び2つの位相画像における周波数成分に応じた位相差を所定の式に適用して得られる第2の直線と重なる重複領域を特定し、重複領域の座標に応じた対応点偏差座標を導出する。
(もっと読む)
物体の形状に関する情報を表す特徴データを確定するための装置およびプログラム
【課題】幾何学特徴データを確定するための、正確さ、および/又は効力、および/又は性能、および/又は有用性が改善された技術を提供する。
【解決手段】本発明の第一の態様によると、複数のセル(p)の少なくとも二つが少なくとも部分的に互いに重なり合い、本発明の第二の態様によると、複数の区域(r)に含まれる物体の対応する部分が所定の測定基準に関して互いにほぼ等しいように、セル(p)の少なくともいくつかの境界が物体が位置する空間内の該複数の区域(r)を区切る。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】距離画像から対象物体の位置姿勢を算出する位置姿勢算出の精度低下を防ぎながら処理速度を維持向上させる。
【解決手段】対象物体までの距離画像を取得する取得部と、距離画像から対象物体の概略位置姿勢を決定する概略位置姿勢決定部と、形状モデル上の所定領域に対応する、距離画像における領域の距離情報のばらつきの程度を示すばらつき値を算出する算出部と、ばらつき値が小さい程、サンプル点の数が少なくなるように、形状モデル上の所定領域ごとに当該所定領域からサンプル点をサンプリングするサンプリング部と、概略位置姿勢からサンプル点と距離画像上の2次元計測点を3次元座標に変換した3次元計測点とを対応付ける対応付け部と、各サンプル点と各3次元計測点との間の距離の総和が最小になるように対象物体の位置姿勢を決定する位置姿勢決定部と、を備える。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法およびプログラム
【課題】 距離画像の計測値の欠損に起因した精度低下を軽減することが可能な位置姿勢の計測技術を提供すること。
【解決手段】 対象物体の位置姿勢を計測する位置姿勢計測装置は、対象物体の距離画像上の画素に対して距離が最小となる形状モデル上の点が、第1の探索部により得られた欠損モデル領域内に存在するか否かを判定する判定部と、形状モデル上の点が欠損モデル領域内に存在すると判定された場合に、第2の探索部により得られた、距離が最小となる距離画像上の画素と形状モデル上の点との組み合わせに補正を施す補正部と、補正が施された、距離画像上の画素と形状モデル上の点との組み合わせにおいて、距離画像上の画素と形状モデル上の点との間の距離の総和を最小にする形状モデルの位置及び姿勢を、対象物体の位置及び姿勢の計測値として算出する算出部と、を備える。
(もっと読む)
画像処理装置、撮像装置、及びプログラム
【課題】画像の画像特徴量を加工する場合、奥行距離に基づいて画像の画像特徴量に対する加工強度を変更しても、画像が不自然にならないようにすることができる画像処理装置、撮像装置、及びプログラムを提供する。
【解決手段】画像処理装置140が、画像が入力される画像取得部141と、画像取得部141に入力された画像に対応する領域毎の奥行距離が入力される距離取得部142と、画像に対応する領域毎の画像特徴量が入力される特徴量取得部143と、画像特徴量に基づいて、画像特徴量に対する加工強度を奥行距離毎に定める加工強度設定部144と、加工強度に基づいて、画像の画像特徴量を、領域毎に画像処理する画像処理部145と、を備える。
(もっと読む)
位置姿勢推定装置及びその方法
【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
測量データの分類方法、測量データの分類装置及び測量データを記録した記録媒体
【課題】短時間で、より精度良く地形を分類できる測量データの分類方法及び測量データを提供する。
【解決手段】真の分類結果が不明である全く新たなエリアにおいても、点群状の測量データを取得すれば、同じ地域特性に属する特徴量の閾値を用いて、サポートベクターマシンにより人手をかけることなく、迅速に建物や樹木の分類を行えることとなる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 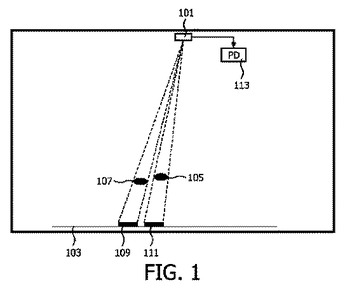 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】そこで、本発明は、眼鏡を掛けた歩行者や帽子を被った歩行者について、歩行者であることの判定ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像のグレースケール画像を2値化処理して生成された2値画像から、処理対象画像部分を抽出する2値画像候補抽出手段20と、処理対象画像部分が歩行者の頭部の特徴を有するか否かを判断して、処理対象画像部分に対応する実空上の物体が歩行者であるか否かを識別する歩行者識別手段21とを備え、歩行者識別手段20は、所定範囲内の間隔をもって垂直方向に対向した二つの処理対象画像部分75,76が抽出されたときには、該間隔部分を埋めて該二つの画像部分を一体化した画像部分について歩行者の頭部の特徴を有するか否かを判断して、該二つの画像部分に対応する実空間上の物体が歩行者であるか否かを識別する。
(もっと読む)
頭部認識方法
本願に記載されているのは、ソース画像における人の頭部を認識する方法である。この方法は、ソース画像における人体の少なくとも一部の輪郭を検出するステップと、ソース画像における人体の深度を計算するステップとを含む。ソース画像からは、その深度での人の頭部に対応する楕円の長半径の大きさ及び短半径の大きさを計算し、検出した輪郭の画素の組の少なくともいくつかについて、アキュムレータ・アレイにおいて、輪郭画素の位置に中心があり、長短の半径の長さを有する楕円の少なくとも一部分を生成する。アキュムレータ・アレイにおける強度極大点の位置が、ソース画像における人の頭部の候補の位置に対応するものとして選択される。  (もっと読む)
(もっと読む)
画像処理装置、その画像処理方法及びプログラム
【課題】
画像上に類似した線分が存在する場合や画像上に線分が密集している場合であっても、画像間の線分を正確に対応付けられるようにした技術を提供する。
【解決手段】
画像処理装置は、対象物体を異なる位置及び方向から撮影した画像を入力する入力手段と、前記入力手段により入力された複数の画像各々から前記対象物体を示す線分を検出する検出手段と、前記検出手段により検出された線分各々を識別するのに用いる特徴ベクトルを求める特徴導出手段と、前記特徴導出手段により求められた特徴ベクトルに基づいて前記複数の画像間における線分各々の対応付けを決定する決定手段とを具備し、前記特徴導出手段は、前記検出手段により検出された線分を通過し且つ該線分に平行でない方向に沿って参照ラインを設定し、当該参照ライン上において輝度が変化した画素の輝度情報をその順序に従って並べた情報を要素として含む特徴ベクトルを求める。
(もっと読む)
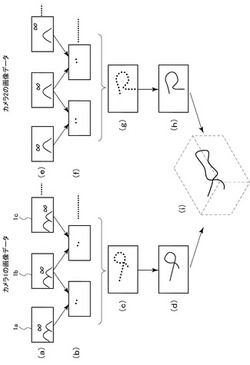
追跡方法
本発明は、フレーム・シーケンス内の少なくとも1つの物体を追跡する方法であって、各フレームが画素アレイを有し、深さ値が各画素に関連付けられている方法に関する。この方法は、各フレームの前記画素の少なくともいくつかを複数の領域にグループ分けするステップと、前記領域を、相互接続された領域のクラスタB1,…,B5にグループ分けするステップと、2次元投影で別のクラスタB1に隣接する少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1の深さ値よりも高い深さ値を有する場合に、少なくとも1つのクラスタB2,…,B5が前記別のクラスタB1によって部分的に遮蔽されている物体に属すると判断するステップを含む。 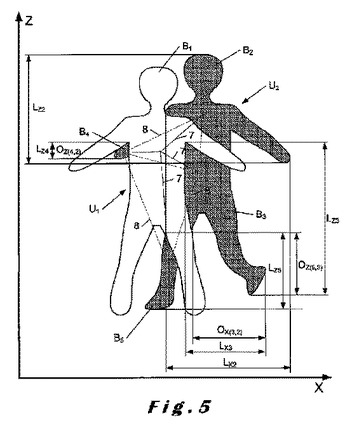 (もっと読む)
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】3次元オブジェクトを上方から撮影した画像に含まれている円筒状または円柱状の3次元オブジェクトを検出するための計算コストを減らすことができる。
【解決手段】3次元オブジェクト抽出部13は、画像に含まれる3次元オブジェクトを抽出する。円形図形検出部100は、上面領域の画像の低解像度画像を用いて円形図形のエッジと前記円形図形の中心点とを検出する。また、円形図形検出部100は、円形図形のエッジと円形図形の中心点とに基づいて、画像の領域のうち円形図形が含まれる領域を設定する。また、円形図形検出部100は、円形図形が含まれる領域の画像を用いて円形図形のエッジと中心点と半径とを算出する。3次元位置姿勢計算部21は、3次元オブジェクト抽出部が抽出した3次元オブジェクトのうち、円形図形の中心点と半径とに基づいて、上面が円形状である円筒または円柱状の3次元オブジェクトの形状を検出する。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 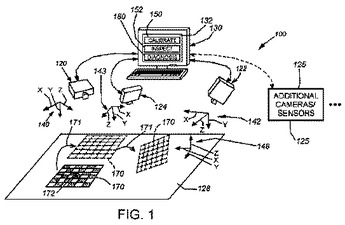 (もっと読む)
(もっと読む)
路面形状認識装置
【課題】路面上に車線が標示されている場合は勿論、車線が標示されていない場合でも実際の路面形状を的確に検出することが可能な路面形状認識装置を提供する。
【解決手段】路面形状認識装置1は、自車両が走行する路面について位置のデータを検出して距離画像Tzを生成する距離画像生成手段6と、距離画像Tzの各水平ラインj上の距離zのデータをヒストグラムHjに投票して水平ラインjごとの代表距離zjを検出し、水平ラインjごとに代表距離zjを仮想平面上にプロットする代表距離検出手段10と、連続性を有しないと評価したプロットを仮想平面上から除外する評価手段11と、除外されずに仮想平面上に残存している全てのプロットに対して近似直線L1、L2を算出する近似直線算出手段12と、近似直線L1、L2の組み合わせを用いて路面形状モデルを生成する路面形状モデル生成手段13とを備える。
(もっと読む)
自動セグメンテーション及び時間的追跡方法
【課題】自動セグメンテーション及び時間的追跡方法を提供する。
【解決手段】一実施形態では、脈管の中心線を検出する方法を提供し、該方法は、3D画像ボリュームを取得する段階と、中心線を初期設定する段階と、カルマン・フィルタを初期設定する段階と、カルマン・フィルタを用いて次の中心点を予測する段階と、前記カルマン・フィルタを用いて前記予測の妥当性を検査する段階と、テンプレート・マッチングを遂行する段階と、前記テンプレート・マッチングに基づいてカルマン・フィルタを更新する段階と、前記の予測し、検査し、遂行し、更新する各段階を所定の回数だけ繰り返す段階とを有する。本発明では更に、前記の中心線を検出する方法に関連して、自動脈管セグメンテーション方法及びセグメント化された脈管の時間的追跡方法を提供する。
(もっと読む)
81 - 100 / 415
[ Back to top ]