
Fターム[5L096CA14]の内容
Fターム[5L096CA14]に分類される特許
21 - 40 / 173
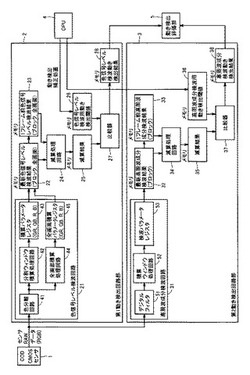
動き検出装置
【課題】動き検出の精度を向上させることが可能な動き検出装置を提供すること。
【解決手段】色分離回路41は、入力された映像のRGBデータを色信号に分離する。分割ウィンドウ積算処理回路42は、画面全体を分割した複数のウィンドウのそれぞれに対して色信号レベル検波を行ない、積算パラメータを算出する。減算処理回路24は、分割ウィンドウ積算処理回路42によって算出されたウィンドウごとの積算パラメータの中から、指定されたウィンドウの積算パラメータについて、最新フレームの積算パラメータと1フレーム前の積算パラメータとの減算を行なう。そして、比較器27は、減算処理回路24による減算結果と予め定められた閾値とを比較し、指定されたウィンドウごとに動きがあるか否かを判定する。したがって、動き検出の精度を向上させることが可能となる。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム

【課題】白線パターンの検出結果に基づいて車両の走行する道路の道路種別を正確な判定結果へと修正することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】車両の現在位置と地図情報に基づいて車両の走行する道路の道路種別を判定するとともに、該判定により車両の走行する道路の道路種別が高速道路以外の道路であると判定されている状態においては、更にバックカメラを用いて車両の走行する道路に描かれた白線パターンを検出し(S12)、検出した白線パターンと白線パターン識別情報とに基づいて車両の走行する道路の道路種別を判定し(S12〜S20)、該判定により車両の走行する道路の道路種別が高速道路であると判定された場合には、車両の走行する道路種別を高速道路以外の道路から高速道路へと修正する(S21)ように構成する。
(もっと読む)
画像認識装置及び画像認識方法
【課題】低解像度画像と高解像度画像の取得時間のずれによる被写体認識失敗の状況を防止することが出来る画像認識装置を提供することを課題とする。
【解決手段】撮像素子により第1の解像度で生成された画像データを基に被写体が存在する領域を検出する被写体検出部と、被写体検出部により被写体が存在する領域が検出されると、撮像素子により第1の解像度で生成された画像データを記憶するメモリと、撮像素子により第2の解像度で生成された被写体検出部により検出された被写体が存在する領域の画像データを入力して被写体の認識処理を行う被写体認識処理部とを有し、被写体認識処理部は、認識処理による被写体の認識に失敗したと判断した場合には、メモリに記憶された第1の解像度で生成された被写体が存在する領域の画像データを入力して被写体の認識処理を行うことを特徴とする。
(もっと読む)
脇見検出装置
【課題】運転者の顔の凹凸に起因する影を大きくすることなく、顔画像に基づく判断をより正確にできる脇見検出装置を提供する。
【解決手段】本発明は、使用者の顔面を含む画像を撮像する撮像手段と、撮像手段の近傍に当該撮像手段の設置方向と光軸が略並行となるように設置された光源と、光源から照射された光の反射箇所を画像に基づいて検出する検出手段と、使用者の顔の位置を検出する顔位置検出手段と、顔の位置と、反射箇所とに基づき使用者の脇見を判断する判断手段とを備える。
(もっと読む)
賞味期限読取装置
【課題】商品に示された賞味期限表示の文字列の傾きの検出の高速化を図ることができる賞味期限読取装置を提供すること。
【解決手段】入力された画像における賞味期限表示の文字列の傾きを、ハフ変換を用いて検出する傾き検出処理部33を備え、賞味期限表示により示される賞味期限情報の読み取りを行う賞味期限読取装置20であって、傾き検出処理部33は、画像の特徴点に対し、予め設定された第1検出角度範囲内にて変化させながら予め決められた角度分解能毎に演算を行って第1傾き角を決定する第1傾き角度決定部331と、第1傾き角を中心に第1検出角度範囲よりも狭い第2検出角度範囲内にて変化させながら、画像の特徴点に対し第1傾き角度決定部331における角度分解能よりも高い角度分解能毎に演算を行って第2傾き角を決定する第2傾き角度決定部332とを備えている。
(もっと読む)
情報処理装置、ブロック検出方法およびプログラム
【課題】ハフ変換が施された画像のデータ量を削減することが可能な、情報処理装置、ブロック検出方法およびプログラムを提供すること。
【解決手段】本発明に係る情報処理装置は、生体に固有な画像情報である生体画像に対してハフ変換を実行するハフ変換部と、所定の形状を有するブロックが、ハフ変換後の生体画像であるハフ空間画像の中に含まれているか否かを検出し、前記ブロックが前記ハフ空間画像中に含まれている場合に前記ハフ空間画像中における前記ブロックの存在位置を表す存在位置情報を出力するブロック検出部と、を備える。
(もっと読む)
画像処理装置、画像処理システムおよびプログラム
【課題】画像膨張処理における膨張量を高精度で決定できる画像処理装置を得る。
【解決手段】複数の基準画像を有するシート23の各基準画像の位置を示す取得位置情報を基準位置取得部26Aにより取得する一方、シート23を画像読取装置により読取ることによって得られた読み取り画像データにより示される基準画像の位置を示す特定位置情報を基準位置特定部26Bにより導出し、特定位置情報および取得位置情報が示す対応する基準画像同士の位置のずれ量の総和が最小となるように対応付部26C、補正パラメータ算出部26Dにより予め定められた共通の補正係数を用いて位置合わせ処理を画像変換部26Eにて実行した後の前記対応する基準画像同士の位置のずれ量の総和が多くなるほど多くなるように、前記画像読取装置により得られる画像データに対する画像膨張処理の膨張量を基準位置特定部26F、局所歪み導出部26G、膨張量決定部26Hにより決定する。
(もっと読む)
スキャンされた文書画像内の前景画素群の連結グループをマーキング種類に基づき分類する方法及びシステム
【課題】文書内の画像上のマーキングをマーキング種類に従って分類する。
【解決手段】
画像を含んだ文書を区分器112aに供給する。区分器112aは、連結成分を見つけることで、その画像を、同じマーキング種類である可能性が高いと識別される前景画素構造の複数の断片へと分割し、横方向に近い罫線及び縦方向に近い罫線を削除し、いくつかの連結成分を更に分割することで断片群を求める。分類器112bは各断片についてのカテゴリスコアを求める。ここで分類器112bは各画素が既知のマーキング種類に従ってラベル付けされているグランドトゥルース画像群により学習したものである。断片が分類器112bにより分類されると、その断片に含まれるすべての画素に同じラベルを割り当てられる。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】正確な手の形状等を高速に抽出する。
【解決手段】発光装置23は、第1の波長の光、及び第1の波長とは異なる第2の波長の光をユーザに照射し、カメラ22は、ユーザに照射された第1の波長の光の反射光を受光して得られる第1の画像、及びユーザに照射された第2の波長の光の反射光を受光して得られる第2の画像を取得し、2値化部42は、第1及び第2の画像に基づいて、ユーザの肌を表す肌領域を抽出し、形状抽出部46は、肌領域上のオブジェクトの形状を表す形状領域を抽出する。より具体的には、形状抽出部46は、オブジェクトと、肌領域上の形状領域以外の領域に対応するユーザの部位との、照射手段からの相対的な距離の違いからオブジェクトを区別して、形状領域を抽出する。本発明は、例えばユーザを撮像した撮像画像から、ユーザの身体の部位の形状を抽出するコンピュータに適用できる。
(もっと読む)
ロボットの対象物認識方法
【課題】領域内に存在する対象物をセンサからの検知情報に基づいて、コンピュータに大きな負担を掛けることなく人間などの対象物を頑健に認識することができる。
【解決手段】ロボット10の周囲に存在する人間は、超音波センサ22,全方位カメラ30,眼カメラ52R,52L,焦電センサ82などの複数のセンサによって検知される。各センサから出力されたセンサデータは、センサ入力/出力ボードを介してメモリに取り込まれる。CPUは、取り込まれたセンサデータのうち複数のサンプリング領域に対応する一部のセンサデータに基づいて、人間の存在確信度の正規分布を仮定する。CPUはまた、仮定された正規分布に基づいて人間の存在位置を認識し、存在確信度が増大するほど領域サイズが拡大するように複数のサンプリング領域を規定する。
(もっと読む)
表面特性を用いて対象物の特定および/または認証をするための方法、および、その方法に使用するセンサ
本発明の主題は、表面特性を用いて、対象物の特定および/または認証をするための方法である。本発明のさらなる主題は、表面を走査するためのセンサである。 (もっと読む)
情報処理装置、方法及びプログラム
【課題】表示部の画面に対する第三者の盗み見を、簡単かつ精度よく検出する。
【解決手段】カメラデバイス11は、使用者が表示デバイス15の画面を見ている時に、画面側から使用者側を撮影する。顔検出手段12は、カメラデバイス11によって撮影された画像の中から、人の顔を検出する。盗み見判定手段13は、顔検出手段12によって検出された顔の大きさに基づき、第三者が盗み見をしているか否かを判定する。盗み見防止信号出力手段14は、盗み見判定手段13によって盗み見をしていると判定されたときに、盗み見防止信号Sを出力する。表示デバイス15は、盗み見防止信号出力手段14から出力された盗み見防止信号Sを入力すると、盗み見を防止する動作をする。
(もっと読む)
待ち行列管理装置、待ち行列管理方法、プログラムおよび生体認証管理システム
【課題】同時に複数の入力がなされた場合であっても認証時間の短縮を図ることが可能な、待ち行列管理装置、待ち行列管理方法、プログラムおよび生体認証管理システムを提供すること。
【解決手段】本発明に係る待ち行列管理装置は、生体情報を複数の情報処理装置群により段階的に認証する生体認証システムにおける第一の情報処理装置群が、入力された生体情報と照合すべき照合データに関する情報である照合データ情報を取得する照合データ情報待ち行列に対して、照合データ情報を伝送する照合データ情報伝送部と、照合データ情報待ち行列を制御し、照合データ情報待ち行列にアクセスした第一の情報処理装置群に属する情報処理装置に対して所定数の照合データ情報をまとめて伝送させる待ち行列制御部と、を備える。
(もっと読む)
映像監視システム
【課題】背景や環境が時々刻々と変わる環境においても、カメラ映像に出現する移動体を効率の良く検出できる映像監視システムを実現する。
【解決手段】カメラ10から取得した映像信号を基に画像データを出力する映像取得部100と、画像データから移動体の候補領域を抽出する移動体候補領域抽出部101と、候補領域が移動体のものであるか判断する移動体検出部102と、を備えた映像監視システムであって、移動体候補領域抽出部101は、画像データの明度勾配方向を量子化し、所定の時空間内の方向符号の出現頻度を表す時空間ヒストグラムを算出し、時空間ヒストグラムの統計上の時空間評価値である時空間豊富度を算出する。移動体検出部102は、時空間豊富度によって候補領域が移動体のものであるか判断する。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】スミアの発生を考慮して特定のシーンを判別することで、高精度なシーン判別を実現する。
【解決手段】画像でスミアが発生しているスミア領域を検出するスミア検出部110と、輝度情報および色情報からシーン判別条件をもとに特定のシーンを判別するシーン判別部109とを有し、シーン判別部109が、スミア検出部109によりスミア領域が検出されたか否かに応じて、判別に係る処理を切り替えるようにする。より詳しくは、所定の輝度情報および色情報を満たす領域が占める割合が所定の範囲内である場合に、夕日判別の条件を満たすと判断するものであって、発生したスミア領域の大きさに応じて、この所定の範囲の大きさを変更する。これにより、高精度なシーン判別を行うことが可能となる。
(もっと読む)
画像処理装置、画像照合方法、および、プログラム
【課題】より精度の高い距離算出を実現する。
【解決手段】特徴点抽出部213が、第1撮像部100Aおよび第2撮像部100Bで取得された画像の一方で特徴点を設定すると、テンプレート設定部214は、特徴点を含む基準テンプレートを、撮像画像のエッジ抽出画像上に設定する。基準テンプレート内の画像がエッジによって分断されている場合、テンプレート設定部214は、分断された領域のうち特徴点を含んでいない領域を基準テンプレートから削除し、削除した領域と同じ面積の領域を、分断された領域のうち特徴点が含まれている領域に、エッジを越えないように追加した変形テンプレートを設定する。距離算出部215は、基準テンプレートもしくは変形テンプレートのいずれかを用いて、他方の画像の他方に対するテンプレートマッチングをおこない、マッチングのとれた特徴点までの撮影距離を算出する。
(もっと読む)
パターン識別装置及びパターン識別装置の学習方法ならびにコンピュータプログラム
【課題】学習に必要な演算量を低減可能なパターン識別装置の学習方法を提供する。
【解決手段】特徴抽出用パラメータに従ってデータから識別用特徴量を抽出する特徴抽出器11と、識別用特徴量を入力としてそのデータに表されたパターンを識別する識別器12とを有するパターン識別装置1の学習方法は、(a)学習用データセットに含まれる同一のパターンが表された学習用データの組を特徴抽出器11に入力して得られる識別用特徴量のクラスタを決定するステップと、(b)クラスタ間の最小距離を求めるステップと、(c)最小距離の極大値が検出されたか否か判定するステップと、(d)極大値が検出されていないと判定した場合、特徴抽出用パラメータを変更して、ステップ(a)〜(c)を繰り返すステップと、(e)極大値が検出された場合、その極大値に対応する特徴抽出用パラメータが、パターン識別処理の実行時に使用されるものとするステップを含む。
(もっと読む)
手書き点と線の認識処理方法及び装置
【課題】さまざまな大きさの点や太さの線がシート上に手書きで描かれていても、これら手書きの点と線を高精度に認識できるようにする。
【解決手段】点と線の手書きが加えられたシートを読み取って、その画像データから点を認識し、該認識された点以外の画像データから線を認識する。点認識処理では、第一の大きさの点パターンを用いて点を検出し、第一の大きさより小さい第二の大きさの点パターンを用いて点を検出し、これら検出した点から、隣接する二点のうち小さい方の点を削除し、近傍に存在するほぼ同じ大きさの二点を削除し、さらに、第一の大きさより小さい点を削除する。線認識処理では、検出された点を除いた画像データをブロック分割し、ブロックごとに線分を検出し、検出された線分及び先に検出された点を連結する。
(もっと読む)
パラメタ制御装置、パラメタ制御プログラム及び多段照合装置
【課題】入力データと登録データとの照合処理において、高度なセキュリティ及び照合精度を確保しつつ迅速に照合処理を行う。
【解決手段】照合1段目では、高速ではあるが低精度の照合処理によって登録データの絞込みを行う。続いて、照合2段目では、中速かつ中精度の照合処理によって、照合1段目からさらに登録データの絞り込みを行う。そして、照合m段目では、前段の複数の照合処理で絞り込まれた少数の登録データに対して低速ではあるが高精度の照合処理を行い、一の登録データの特定を行う。各照合段階の登録データの絞り込みの精度及び速度を調整するパラメタを登録データに合わせて照合速度及び/又は照合精度が最適になるよう自動的に算出する。この様にして、高度なセキュリティ及び照合精度を確保しつつ高速に照合処理を行うことが可能になる。
(もっと読む)
認識用データ生成装置及び電子カメラ、認識用データ生成プログラム、並びに認識用データ生成方法
【課題】複数の撮影画像の各々から同一被写体の認識用データを容易に生成することのできるようにする。
【解決手段】動画ファイルを構成する静止画内に人物像があるか否かを判断する(ステップS9)。人物像がある場合には、人物像が複数あるか否かを判断し(ステップS10)、複数ある場合には、人物選択指示が検知されたならば、表示させている移動させて、別の人物に枠を重ねて表示する(ステップS15)。決定指示を検知した場合には、枠が重なっている人物像の特徴情報を抽出し、認識用データとしてデータベースに登録する(ステップS18)。また、コマ送り指示が検知されると(ステップS21→YES)、表示する静止画を次コマに切り替えて(ステップS22)、ステップS9からの処理を繰り返す。
(もっと読む)
21 - 40 / 173
[ Back to top ]