
Fターム[5L096CA14]の内容
Fターム[5L096CA14]に分類される特許
161 - 173 / 173
白黒カラー画像判別方法及び画像判別装置及びそれらを備えた画像読取装置

【課題】原稿を読み取る画像読取装置において、原稿が白黒画像またはカラー画像であるかを精度良く判別する。
【解決手段】画像データを複数の領域に分割する画像領域分割部103と、画像領域分割部103により分割された複数の各画像領域内の色成分の平均値を算出する領域内色成分平均値算出部104と、領域内色成分平均値算出部104からの値を基に複数の画像領域のうち当該画像領域の色を判別する領域内色成分判別部105と、複数の領域内色成分判別部105の結果を基に原稿画像の種類を判別する原稿画像判別部110とを備える構成とする。
(もっと読む)
車両用走行区分線認識装置

【課題】撮影画像を合成するとき、合成された画像から遠方の走行区分線に対応する点列が欠落することがなく、よって走行区分線を精度良く正確に認識できるようにした車両用走行区分線認識装置を提供する。
【解決手段】車両の進行方向の路面を含む領域を撮影するカメラなどの撮影手段と、撮影された撮影画像中の路面上の少なくとも白線などの破線状の走行区分線を認識可能な区分線認識手段と、異なる時刻に撮影された複数の撮影画像を合成して撮影画像中の走行区分線の長さを延長する画像合成手段(S10からS16)とを備える車両用走行区分線認識装置において、画像合成手段は、区分線認識手段による走行区分線の認識処理における撮影画像中の少なくとも走行区分線の形状に変化を与えない処理段階、具体的にはエッジ検出前の段階で(S12)で撮影画像を合成する。
(もっと読む)
印刷物欠陥表示方法および印刷物欠陥表示装置
【課題】 印刷物の欠陥を検出した後に欠陥の内容を表示することが可能な印刷物欠陥表示方法および印刷物欠陥表示装置を提供すること。
【解決手段】 印刷が終了した印刷物を順次撮像して得た画像データに基づいて印刷物の欠陥を表示する印刷物欠陥表示方法であって、印刷が終了した第1の印刷物を撮像することにより第1の解像度を有する第1の画像データを得る第1撮像工程と、第1撮像工程で得た画像データと基準となる画像データとを比較することにより印刷物の欠陥を検出する欠陥検出工程と、第1の印刷物の後に印刷が終了した第2の印刷物における欠陥検出工程で欠陥が検出された領域を撮像することにより第1の解像度よりも解像度が高い第2の解像度を有する第2の画像データを得る第2撮像工程と、第2の画像データに基づいて欠陥が検出された領域を拡大表示する拡大画像表示工程とを備える。
(もっと読む)
加工装置
【課題】 照明手段を配置するために大きなスペースを要することなく、ウエーハの全体の輪郭を確実に認識することができる輪郭認識機能を備えた加工装置を提供する。
【解決手段】 中央部に開口を備えた環状の支持フレームに装着された透明乃至半透明の保護テープの表面に被加工物が支持された被加工物組立体の被加工物を加工する加工装置であって、被加工物組立体を収容するカセットを載置するカセット載置テーブルと仮置きテーブルとの間に配設され支持フレームの開口における該搬出手段の搬出方向と直角な方向の最大長以上の長さと該最大長さより短い幅を有する帯状の発光手段と、帯状の発光手段と対向して配設され該帯状の発光手段との間に位置付けられた該被加工物組立体の被加工物の輪郭を撮像する撮像手段と、撮像手段によって撮像された画像情報に基づいて被加工物全体の輪郭を認識する輪郭認識手段とを具備している。
(もっと読む)
単眼視3次元位置計測装置および方法
【課題】 1台の撮影手段で撮影した一枚の画像情報のみに基づき、高速、かつ、少ない目印点数で3次元位置を計測する装置および方法を実現すること。
【解決手段】 対象物に4つの目印を付し、全ての目印の対について相互間距離を計測し、撮影手段で4つの目印の2次元画像を取得し、その2次元画像内での目印の座標を求め、その座標値に基づき撮影手段が各2つの目印をはさむ見込み角を計算し、3つの目印を選択して形成した3角形について、上記相互間距離と上記見込み角に依存する4次方程式を解いて撮影手段と各目印の間の距離の候補値の組を求め、他の三角形より得られる候補値と整合性がある値を選択して上記距離を定め、3次元位置を決める、単眼視3次元位置計測装置および方法とした。
(もっと読む)
部分的な手の指の画像を作成し処理するセキュアシステム及び方法
詳細な特徴テンプレートを発生させるのに従来的に必要とされる十分な又は完全な指紋画像を決して発生させることも再構成することもなく、十分な画像指紋詳細特徴テンプレートを発生させることによって指紋センサから取得される指紋画像を作成し処理する際にセキュリティを提供する装置、システム、方法、コンピュータプログラム、及びコンピュータプログラム製造物品である。 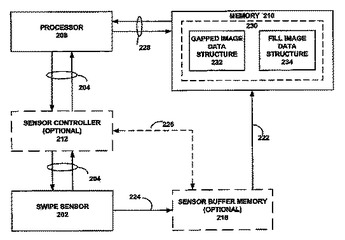 (もっと読む)
(もっと読む)
ヒト被験体におけるストレス、感情および欺瞞を感知するための強力かつ低コストの光学システム
ヒト被験体において選択された感情または心理状況を感知するための方法およびそれに関連する装置である。本技術は、ヒト被験体の顔面イメージを得るために2次元カメラを採用している。次いで、イメージ処理モジュールがイメージをスキャンし、顔面の位置および範囲を決定し、顔面の選択された重要な領域をスキャンする。選択された重要な領域のサイズおよび活動は、被験体の顔の一連のイメージフレームと比較することによってモニタリングされる。また、その領域はトラッキングされ、考えられる被験体の動作に対する補正が行われる。選択された重要な領域の感知されたパラメータは、データベース内に保存されているものと比較される。データベースは、重要な領域の動作を、被験体の多様な感情および心理状況と関連づける。そして、被験体のレポートまたは評価が生成される。  (もっと読む)
(もっと読む)
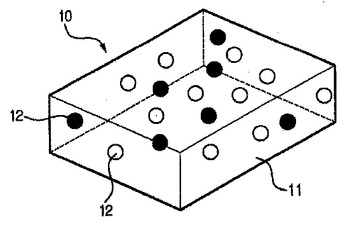
ランダムタイプの識別材料、3D識別システムおよびそれを用いる方法
本発明は、識別装置のためのランダムタイプの認識オブジェクトに関する。ここにおいて、認識粒子は、3D形状の範囲内で不規則に分配され、1つまたは複数の方向において、3D形状内で分配される認識粒子の位置価および特性値は、別々の認識手段によって認識され、認識装置および方法は、複製が不可能であるランダムタイプの認識オブジェクトを使用する。
さらに本発明は、購入者が、購入された製品が本物かどうか決定するため、認証システムに認識装置を用いて製品と共に分配される認識オブジェクトから抽出されるデータを伝達し、認証システムは、購入者に受信データと一致する製品情報を伝達し、購入者が、購入された製品と、製品が本物であるか決定された認証システムから受容された製品情報とを比較する製品認証システムおよび方法に関する。
 (もっと読む)
(もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
手振れ補正装置および方法、手振れ検出装置
【課題】小型・低コストでありながら、正確で応答性の良い手振れ補正を行うことができるようにする。
【解決手段】入力画像YC1,YC2を複数段階に亘って段階的に縮小し、より下層レベルの縮小画像を使って大まかに求めた大域移動量を利用して、上層レベルで局所移動量を求める際の走査ブロックを構築することにより、2枚目の画像上に設定する走査ブロックをそれほど大きくしなくても、1枚目の画像上に設定した参照ブロック内の画像と相関がとれるようにする。走査ブロックの大きさを小さくできることにより、その走査ブロック内に同じあるいは類似の絵柄が複数存在する確率が小さくなり、参照ブロックの画像と走査ブロックの画像とが誤った位置でマッチングしたと判断される不都合が抑制される。また、走査対象となる範囲が狭くなるので演算量が減り、手振れ補正の応答性が向上する。
(もっと読む)
画像処理装置
【課題】 効率的な画像読み取り動作、画像処理を行う画像処理装置を提供する。
【解決手段】 画像処理装置100において、制御部10が、画像読み取り部20により読み取られた原稿の一部分の画像の輝度ヒストグラムを作成し、その輝度ヒストグラムに基づき、最適なガンマ補正を実施するためのガンマ補正データを選択し、その選択されたガンマ補正データに基づいて、原稿の全体画像を読み取る本スキャン時にガンマ補正を実施する画像処理制御を行う構成にした。
(もっと読む)
画像処理装置および画像処理方法、プログラムおよびプログラム記録媒体、並びにデータおよびデータ記録媒体
【課題】 オブジェクトの抽出等を精度良く行う。
【解決手段】 ユーザに画像が提供され、ユーザが、その画像上の位置をクリックすることにより得られるクリックデータが、動き解析部121に供給される。動き解析部121は、ユーザからの複数のクリックデータに基づいて、ユーザによるクリック位置の動きを解析し、意図解析部123は、その動きの解析結果に基づいて、ユーザの意図を解析する。そして、オブジェクト抽出部125は、そのユーザの意図の解析結果に基づいて、画像データからオブジェクトを抽出する。
(もっと読む)
基板検査装置
【課題】 受光素子の画素サイズと電極パターンの繰り返しピッチとの関係が整数倍でなく、位相ずれを有する場合でも、この位相ずれによる各画素データの信号品質の低下を抑制し、画素サイズに対して微小な異物を高精度に検出できるようにする。
【解決手段】 パターンピッチが300[μm]で画素サイズが14[μm]の場合には、パターンのピッチを画素サイズで除することによって得られるパターン相当の画素数は約21.4である。この画素数に第1の整数として5を乗じると、その値は107となるので、5個のパターンで疑似パターンを形成することによって、疑似パターンと画素との間の相対的な位置関係がほぼ同位相となる。差分データ作成手段30はこの疑似パターンの隣接するもの同士の画素を用いて、差分データVを作成する。しきい値作成手段50は、差分データVから欠陥検出時のしきい値Tを作成する。欠陥検出手段80,90は差分データVとしきい値Tとを比較して欠陥の検出を行う。
(もっと読む)
161 - 173 / 173
[ Back to top ]