
Fターム[5L096FA54]の内容
Fターム[5L096FA54]に分類される特許
1 - 20 / 140
画像調整方法、画像調整装置及び画像調整プログラム
【課題】プレゼンテーション時の表示画像の視認性を向上させるのに有利な画像調整方法を提供する。
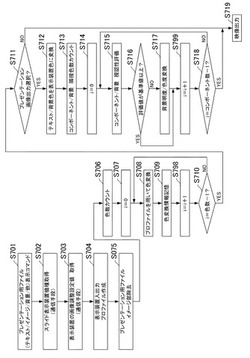
【解決手段】画像調整方法は、情報処理装置から画像データと、表示装置が表示する画像用の表示設定とを取得する取得工程(S702,S703)と、該表示設定を用いてプロファイルを作成し、作成したプロファイルを用いて表示装置から出力する画像の画像データに変換する変換工程(S704,S712)と、該画像データに含まれる第1コンポーネントと第2コンポーネントとの間の明度及び色度の差に関する視認性の評価値を演算する演算工程(S715)と、取得した視認性の評価値と、予め設定された基準値とを比較する比較工程(S716)と、比較工程で得られた比較結果が基準値を下回る場合に視認性が低いと判断し、明度または前記色度を変更することにより視認性を高める変更工程(S717)とを含む。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム

【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像認識装置および画像認識方法
【課題】画像から特定の幾何学的図形を構成する物体に対応する領域を精度よく抽出する装置および方法を提供する。
【解決手段】画像認識装置は、画像からエッジセグメントを抽出するエッジ抽出部と、エッジ抽出部により抽出されたエッジセグメントを利用して形成される予め決められた幾何学的な図形の候補の組合せを取得する取得部と、取得部により取得された各組合せについて、図形の候補の外周が抽出されたエッジセグメントによってカバーされる程度を表す再現率、および、抽出されたエッジセグメントが図形の候補として利用される程度を表す適合率をそれぞれ算出する算出部と、再現率および適合率に基づいて決まる評価値が最大となる組合せに含まれる図形の候補に対応する領域を抽出する画像抽出部を有する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】時系列順に撮像された一連の画像から網羅性の高い要約画像を検出することができる画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】画像処理装置は、時系列順に撮像された一連の画像間において同一の対象が映る領域同士を対応づけ、該対応づけられた領域全体を1つの連結領域として設定する対応領域連結部110と、該連結領域の特徴量を算出する連結領域特徴量算出部120と、特徴量をもとに、上記一連の画像に映された対象が該一連の画像内の各画像に集約されている度合いに対応する要約指標値を算出する要約指標値算出部130と、要約指標値をもとに要約画像を検出する要約画像検出部140とを備える。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム、並びに、画像処理による放射線量推定方法
【課題】撮影画像内の点や短い線や被写体のコーナーなどの凸部分を特徴点として安定・的確に抽出することができるようにする。
【解決手段】元画像内の着目点と当該着目点から角度θ方向に距離dだけ離れた点との2画素の画素値の対の出現度数を用いて方向別の濃度共起ヒストグラムを作成するステップ(S2)と、当該方向別の濃度共起ヒストグラムの要素の出現確率を算出するステップ(S3)と、当該方向別ヒストグラム要素出現確率を用いて方向別自己エントロピの計算を行うステップ(S4)と、元画像の画素値を対応する方向別自己エントロピの値に置換することによって方向別自己エントロピ画像を作成するステップ(S5)と、当該方向別自己エントロピ画像を用いて特徴画像として総乗画像と総和画像とのうちの少なくとも一方を作成するステップ(S6,S7)とを有するようにした。
(もっと読む)
動き画像領域判定装置またはその方法
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
画像照合装置、画像照合方法及びコンピュータプログラム
【課題】画像照合を高速に実施するとともに、画像の類似性を高精度に判定することが可能な画像照合装置、画像照合方法を提供する。
【解決手段】画像照合装置1は、第1画像及び第2画像を複数のブロックに分割する画像分割部22、25と、第1画像及び第2画像について、各ブロックに含まれる画素の正規化画素値の総和及び二乗和に基づき、第1画像の特徴ベクトル及び第2画像の特徴ベクトルを算出する特徴ベクトル算出部23、26と、ラグランジュの未定乗算決定法を利用して導いた正規化相互相関の上限値を算出する式を用いて、第1画像の特徴ベクトル及び第2画像の特徴ベクトルに基づき、第1画像と第2画像の正規化相互相関の上限値を算出する上限値算出部27と、上限値が第1の閾値以上であるか否かに基づいて第1画像と第2画像を照合する第1照合部28とを有する。
(もっと読む)
画像処理方法、画像処理装置及びスキャナ
【課題】特定のオブジェクトの境界の内側にある、画像における領域を確保し、これにより特定のオブジェクト手の領域、即ち別のオブジェクトを画像から間接的に除く。
【解決手段】画像処理方法は、画像における前景のオブジェクトのエッジマップを決定するエッジマップ決定手段、エッジマップから境界線の候補を取得し、境界線の候補のうちで、前景のオブジェクトにおける特定のオブジェクトの境界を定義する境界線を決定する境界線決定手段、及び特定のオブジェクト以外の前記境界線を超える前記前景のオブジェクトを除く除去手段を備える。この方法は、特定のオブジェクトの境界を越えて捕捉された画像における、例えば手のような別のオブジェクトの画像を除去することに適用される。本発明の実施の形態に係る画像処理方法によれば、画像における特定のオブジェクトの境界は、正確に決定され、これにより境界を越える別のオブジェクトを除去して、その後の他の画像処理を容易にすることができる。
(もっと読む)
画像処理方法および画像処理装置
【課題】迅速かつ有効的に画像ピクセルの顕著性値を分析して、画像における重要物体領域を均一的に表現する。
【解決手段】本発明は、領域のコントラストに基づいて画像の視覚的顕著性を検出する画像処理方法と画像処理装置に関するものである。当該方法は、自動分割アルゴリズムを用いて入力画像を複数の領域に分割する分割ステップと、前記複数の領域のうちの一つの領域とその他の領域との色、の差分の重み付き和を利用して、当該領域の顕著性値を算出する算出ステップとを含む。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
走行支援装置
【課題】特殊な照明装置を追加するといったコストアップを招くことなく、周期環境が暗い状況であっても障害物の検出精度の向上を図る。
【解決手段】光源検出部12は、光源対象領域Rdにおいて後続車両のヘッドライト(光源)に相当する面積を光源面積として算出する。そして、閾値算出部14は、算出した光源面積に応じて、後続車両検出部15において利用される差分法の閾値を設定する。この場合、後続車両検出部15は、撮像画像Ipにおいて検出領域R1,R2を設定し、評価パラメータである差分法の閾値に基づいて撮像画像を評価することにより、検出領域R1,R2内における障害物(併走車両)を検出する。
(もっと読む)
画像監視装置
【課題】監視空間内において顔を隠蔽している人物を不審者として判定する画像監視装置において、人物の後頭部等を顔隠蔽者と誤判定することを防止する。
【解決手段】画像監視装置1は、撮像部2にて取得された入力画像中から人物領域を抽出し、さらに人物領域周辺部から頭部候補領域を抽出する。そして抽出された頭部候補領域が顔隠蔽者か否か判定する際に、肌領域の重心位置が頭部候補領域の中心付近の所定領域内にある場合に、顔隠蔽者と判定する。
(もっと読む)
画像認識装置
【課題】撮像画像中の円形標識をより精度良く認識することを可能にする画像認識装置を提供する。
【解決手段】標識検出処理部によって、車両の前方を撮像した撮像画像から円を検出するとともに、検出した円の内接四角形の内部領域、および内接四角形と外接四角形との間の所定領域のうちの少なくともいずれかの領域に相当する撮像画像の色相、彩度、明度の比率をもとに、特に赤色の比率や無彩色の比率をもとに速度規制標識を精度良く、処理の負荷を低減し、認識する。
(もっと読む)
画像処理装置およびプログラム
【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
IRイメージングシステムを介して得られるIR画像における総人数の決定方法
【課題】周囲背景から人を分離する。
【解決手段】IRイメージングシステムを用いて得られるIR画像内の人の数を決定するための新規システム及び方法は、特別に構成された輝度比セットを介して周囲背景から人を分離する。これらの比から導出される量及びしきい値は、IR画像内の1つのピクセルが人からのものか、人以外からのものかを選択的に分類するために使用される。人数は、IR画像内の様々なピクセルの分類を基礎として決定される。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】前景領域の追跡を行う際に、誤検出された領域を含んでいるかを判断できるようにする。
【解決手段】動画における前景領域切り出し、および領域追跡における面積変化時に領域の画像特徴の差分を取って得られる差分から時間的な差分量を検出し、領域の面積変化時の誤検出領域を検出することで、誤検出された領域を含んだまま、領域追跡を行うと誤検出領域が後のフレームに伝播され、誤検出領域が拡大される不都合を防止できるようにする。
(もっと読む)
侵入者監視装置、異物実体画像の識別方法、及びプログラム
【課題】
侵入者監視装置において、監視領域内に映り込んだ影による誤報を防止することである。
【解決手段】
背景画像と監視画像との差分画像における異物画像から異物の有無を検知する異物検知手段31と、前記監視画像における輝度勾配が所定の値以上であるエッジ位置を特定するエッジ位置特定手段33と、前記差分画像における前記エッジ位置に相当する位置により挟まれた前記異物画像部分から、前記異物の実体画像を構成する実体画像識別手段34とを有する。
(もっと読む)
画像処理装置
【課題】海底画像群から水産資源を調査する技術を提供する。
【解決手段】特徴画素抽出部20は、検出対象を被写体に含む画像を二値化してドットパターンを取得する。形状特徴抽出部30は、前記ドットパターンにより形成された形状をもとに前記検出対象の候補を抽出する。確信度算出部40は、前記検出対象の候補の形状によって定まる所定の範囲内に含まれる、当該候補の形状を構成するドットの数を確信度として算出する。検出対象領域抽出部50は、前記確信度が所定の閾値以上となる形状を識別して計数する。
(もっと読む)
位置計測装置、位置計測方法及びマーカー
【課題】撮像画像における画素より小さな単位により画像中におけるマーカー位置を高精度に特定することを可能とする。
【解決手段】位置計測装置1では、マーカー画像が画像取得部10により取得され、二値化画像生成部11によりマーカー画像に基づき複数の異なる閾値ごとに二値化マーカー画像が生成され、マーカー重心座標算出部12により二値化マーカー画像におけるマーカーが捉えられた画素に基づきマーカー重心座標が算出されるので、当該二値化マーカー画像におけるマーカーの位置が特定される。また、1つのマーカーが捉えられたマーカー画像に基づき、画素の階調値に関する閾値を変えて複数の異なる二値化マーカー画像が生成され、複数の二値化マーカー画像ごとにマーカー重心座標が算出され、マーカー座標算出部13により複数のマーカー重心座標の重心の座標がマーカー座標として算出・出力される。
(もっと読む)
1 - 20 / 140
[ Back to top ]