
Fターム[5L096GA08]の内容
Fターム[5L096GA08]に分類される特許
21 - 40 / 941
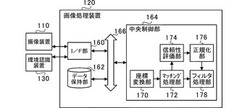
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
追跡装置、追跡方法およびプログラム

【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 タガントが付与された物品を識別する際に、タガントの影による分布位置の誤認識を防ぎ、精度よく特徴点抽出を行うことが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有するタガントをランダムに配置しておく。また個々の物品の撮影画像からタガントの影を除去した後、タガントの分布位置情報を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品についても同様に、撮影画像から影除去処理後、タガントの分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像識別装置および画像識別方法
【課題】専用の帳票を必要とせず、罫線のない帳票にも適用可能で、しかも類似帳票を正しく識別することができる画像識別装置および画像識別方法を提供する。
【解決手段】第1の画像としてのマスター画像を入力するマスター画像入力部101と、第2の画像としてのデータ画像を入力するデータ画像入力部102と、マスター画像に対して指定されるマスク領域の組を入力するマスク領域入力部104と、マスター画像とデータ画像とを整合させる画像整合部103と、整合されたマスター画像とデータ画像との間で、マスク領域を除いた差分を抽出する差分抽出部105と、抽出された差分の大きさにもとづいてマスター画像とデータ画像との相違度を出力する相違度出力部106と、を備える。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
移動体追跡装置、移動体追跡方法及びプログラム
【課題】距離画像によって構成される動画像を解析し、移動体を追跡する場合において、移動体同士が接触或いは重複していたとしても、各移動体を区別して追跡することができる移動体追跡装置等を提供する。
【解決手段】移動体追跡装置1は、距離情報から距離画像を生成し(S1)、距離画像の2値化、ノイズ除去を行い(S2)、撮影時刻が隣接する2つの距離画像から各々移動体領域を1つずつ特定し、特定された2つの移動体領域の組ごとに重複領域を抽出し、重複領域の面積情報が所定値以上であった場合には移動体領域の組が同一の移動体であると判定し(S3)、同一の移動体であると判定された移動体領域の組について、移動体の移動位置を追跡する(S4)。
(もっと読む)
健康度報知装置、プログラム及び健康度報知方法
【課題】より簡便に健康状態を知ることを可能とする。
【解決手段】実施形態の健康度報知装置は、撮像部が撮像した画像を取り込む画像取込手段と、撮像した画像から人物の顔を検出する顔検出手段と、人物の顔が検出された画像の中の顔の領域をもとに、人物の顔の状態を認識する顔状態認識手段と、認識された顔の状態をもとに人物の健康状態を判別する判別手段と、判別された健康状態を報知する報知手段とを備える。
(もっと読む)
画像中の物体の検出及び追跡
【課題】本開示は画像処理に関し、より詳細には画像中の物体を検出することに関する。
【解決手段】一つの開示された方法によれば、特定の物体を表す画像点の三次元空間における座標値を算定する。前記空間内のモデルを表す式を提供する。前記モデルは、一つ以上の他の物体の学習用画像のセットの特性を示す。前記画像点と前記モデルとの間の距離を算定するために前記座標値を前記式に適用する。前記算定された距離に基づいて、前記特定の物体が前記一つ以上の他の物体と一致するか否かを判定する。学習用画像セットを受け取ってもよい。前記学習用画像セットに基づいて多次元空間(例えば、固有空間)を決定してもよい。前記空間に前記学習用画像セットを投影することによって画像点のセットを生成してもよい。前記画像点セットの特性を示す前記空間内のモデルを表す式を決定してもよい。
(もっと読む)
興味推定支援装置、方法及びプログラム
【課題】ユーザの興味推定の候補となる画面を漏れなく抽出できるようにし、これによりユーザの興味を高精度に推定可能とする。
【解決手段】画面キャプチャ処理部11により表示デバイス32の表示画面を一定の時間間隔でキャプチャしてその画面イメージデータを表示履歴記憶部21に順次蓄積する。そして、変化なし領域抽出部12により、上記蓄積された時刻の異なる2つの画面イメージデータ間の差分を求め、この差分をもとに変化なし領域を抽出してその画像データを領域画像データ記憶部22に記憶する。そして、この記憶された変化なし領域の画像データの内容を画像認識部14により認識し、この認識結果を解析データとして解析データ記憶部24に保存すると共にサービス提供事業者等へ送信する。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
指示光検出装置及び方法
【課題】撮像部によって指示光の位置を検出する構成において、環境光の影響を軽減して指示光の検出精度の向上を実現する。
【解決手段】遠隔指示器から射出される指示光(赤外光)が検出されていない期間(50が肯定)に、指示光の検出範囲内を定期的に撮像することで得られた背景画像をフレームメモリに上書き記憶しておき(52〜60)、指示光(赤外光)が検出されると指示光の検出範囲を撮像し(64)、背景画像との差分画像を生成し(66)、差分画像から高輝度領域を抽出し(68)、指示光領域の探索、位置の演算、出力を行う(76〜80)。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】ユーザの意図しない動作がジェスチャと誤認識されるのを防止することを課題とする。
【解決手段】画像処理装置10は、画像を取得する。さらに、画像処理装置10は、取得された画像からジェスチャを認識する対象を特徴付ける領域を抽出する。さらに、画像処理装置10は、画像のフレーム間で領域同士を対応付ける。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動方向を抽出する。さらに、画像処理装置10は、画像のフレーム前後で領域が移動した移動距離が所定の閾値よりも大きい場合に移動方向を出力する。さらに、画像処理装置10は、閾値を超えた移動距離を用いて閾値を更新する。
(もっと読む)
医用画像処理装置、医用画像処理方法および異常検出プログラム
【課題】解剖学的構造の異常を検出する医用画像処理装置を提供すること。
【解決手段】本実施形態に係る医用画像処理装置は、健常ボリュームデータと被検体のボリュームデータとを記憶する記憶部と前記被検体のボリュームデータに基づいて、複数種類の形態的指標を計算する形態的指標計算部と、前記複数種類の形態的指標と前記健常ボリュームデータにおける健常な複数種類の形態的指標とに基づいて、前記被検体のボリュームデータを前記健常ボリュームデータに位置合わせする位置合わせ部と、前記位置合わせされた被検体のボリュームデータにおける前記複数種類の形態的指標と前記健常な複数種類の形態的指標とに基づいて計算された形態的相違度を、閾値と比較することにより、前記被検体のボリュームデータにおける形態的異常を検出する異常検出部と、を具備することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
21 - 40 / 941
[ Back to top ]