
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
111 - 120 / 562
画像認識装置、装着型ロボット、及び画像認識プログラム
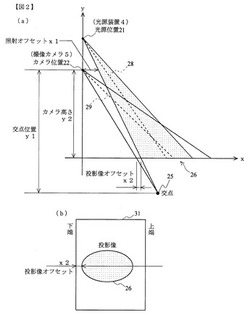
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】装着者の意図にかかわらず、適切な歩行支援を行う。
【解決手段】装着者は、装着型ロボット1を装着して駅のホーム70の上を歩行し、装着型ロボット1は、装着者の歩行を支援している。ホーム70の破線から端部よりの領域には、危険領域80が設定されている。危険領域80の上部には、照明100、100、…が設置されており、照明100の発する照明光には、危険領域を示す危険領域情報が含まれている。装着型ロボット1は、危険領域情報を受信することにより、現在位置が危険領域80であることを認識し、画像認識によって前方の状態を確認する。画像認識によって、ホームの端部の段差が検出された場合、装着型ロボット1は、装着者の前進を阻止する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
歩行補助具
【課題】骨折やアキレス腱断裂等により、一方の脚に障害を持つ人が、腕の力に頼らずに、健常者に近い脚を交互に振り出す歩き方で楽に歩行することを可能とする歩行補助具を得ることを目的とする。
【解決手段】装着者の患脚側の座骨および大腿骨から体重を受ける座部と、座部に接続された、側面形状が装着者の股関節近傍かそれよりやや上の点を中心とする概円弧状をなす接地部を持った弧台を備え、患脚側が立脚になる期間は、弧台を転がしながら前進するようにした。
(もっと読む)
要介護者の移動補助装置
【課題】足腰の筋力不足やバランス感覚の衰えなどを有する、要介護者8の立ち上がりと歩行を補助する移動補助装置1であって、要介護者8が介護人の補助を受けることなく、自由に移動することを可能とする移動補助装置1を提供することにある。
【解決手段】水平方向に移動可能、かつ、垂直方向に昇降可能なスライドコラム6を設け、スライドコラム6に身体把持部7a、7bを取り付けた移動補助装置1とする。また、胴体8cと腕8bの間に身体把持部7a、7bのアーム17a、18aを抱えた状態で、要介護者8が移動するものとし、要介護者8が移動したい方向に頭8aを傾けたときに、傾いた頭8aの方向を振り子22の傾きに変換する変換部2を設け、検出部3a、3bによって振り子22の傾いた方向である振子平面方向を検出し、振子平面方向に身体把持部7a、7bを移動させる。
(もっと読む)
リハビリ補助装置
【課題】ユーザの関節に適度な負荷を与えることができるとともに、ユーザが関節を大きく動かすことができるリハビリ補助装置を提供する。
【解決手段】リハビリ補助装置100は、ユーザの大腿に装着する大腿リンク20と、下腿に装着する下腿リンク30を備える。大腿リンク20と下腿リンク30は回転可能に連結されている。リハビリ補助装置のコントローラ12は、下腿リンク回転角の目標角の経時的変化を記述した目標パターンを記憶している。コントローラ12は、モータ26によって下腿リンク30の回転角を目標パターンに追従させる追従制御を実行する。コントローラ12は、リハビリ動作開始時点は追従制御を休止状態とするとともに、下腿リンク30を受動回転可能状態とし、リハビリ動作開始時点からの経過時刻に対応する目標パターン上の目標角と計測された回転角との角度差を特定し、角度差が予め定められた許容角度差を超えた場合に追従制御を開始する。
(もっと読む)
歩行支援装置
【課題】効率よく歩行運動を支援することのできる動力レスの歩行支援装置を提供する。
【解決手段】歩行支援装置100は、腰リンク10、大腿リンク20、下腿リンク30、及び、足リンク40を備える。大腿リンクまたは下腿リンクにはプーリ24が支持されている。プーリ24は、膝関節の回転軸よりも前方に位置する。紐状弾性部材(スプリング50とワイヤ54)が、その一端が腰リンクに対する大腿リンクの回転軸線よりも前方で腰リンクに連結しており、途中でプーリに掛けられ、他端が下腿リンクに対する足リンクの回転軸線よりも後方で足リンクに連結している。
(もっと読む)
アシストロボット
【課題】ユーザに密着してユーザの動作を補助するアシストロボットであり、失禁の水分により電気系統が短絡してもアクチュエータが予期せぬ動作を起こさないアシストロボットを提供する。
【解決手段】アシストロボット100は、ユーザに装着する脚装具10を備える。脚装具10は、ユーザの大腿と下腿の夫々に装着される大腿リンク20と下腿リンク30を備える。脚装具10にはまた、脚の動きを補助するモータ26が備えられている。脚装具10の大腿リンク20には、アンモニア濃度を計測するガスセンサ41が備えられている。アシストロボット100は、ガスセンサ41が検知したアンモニア濃度が予め定められた閾値濃度を超えた場合にモータ26の電源を遮断する。
(もっと読む)
歩行支援装置
【課題】ユーザが荷物を持つことや手摺につかまることに起因して歩行中のユーザの荷重パターンが変化する状況にも対応できる歩行支援装置を提供する。
【解決手段】歩行支援装置100は、脚装具10とコントローラ12を備える。脚装具10は、脚に装着される大腿リンク20と下腿リンク30とモータ26と荷重センサ32を備える。モータ26は、下腿リンク30を揺動させる。荷重センサ32は、脚の足底に加わる荷重を検知する。コントローラ12は、歩行時の遊脚動作に対応する膝角度の経時的変化を記述した目標パターンを記憶しおり、下腿リンク30がその目標パターンに追従するようにモータ26を制御する。コントローラ12は、検知された荷重が第1閾値を超えた後に第2閾値を下回ったときに目標パターンへの追従制御を開始する。さらにコントローラ12は、荷重変化のピーク値が所定の荷重範囲から外れた場合にそのことをユーザに報知する。
(もっと読む)
111 - 120 / 562
[ Back to top ]