
国際特許分類[A61H3/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 病人または身体障害者歩行補助器具 (875)
国際特許分類[A61H3/00]の下位に属する分類
松葉づえ (51)
病人または身体障害者のための車輪のついた歩行補助具 (197)
盲目者のための歩行補助具 (65)
国際特許分類[A61H3/00]に分類される特許
91 - 100 / 562
動作補助装置及び動作補助制御用プログラム
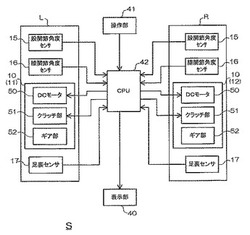
【課題】患者の回復訓練等における補助を自立的且つ安全に行うことが可能な動作補助装置を提供する。
【解決手段】歩行面上を歩行中における患者の動作を補助する場合に、患者60の脚の膝関節部に装着されており、歩行に伴う膝関節部の屈曲動作を補助する駆動ユニット10と、駆動ユニット10が装着されている脚の踵が歩行面から離れたことを検出する足裏センサ17と、踵が歩行面から離れたタイミングから屈曲動作の補助を開始するように、駆動ユニット10を制御するCPU42と、を備える。
(もっと読む)
軽量化歩装具

【課題】不幸にして病気怪我から足の一部が曲がらなく、あるいいは曲がりにくくなり、歩装具を着けざるを得なくなってしまった人に、少しでも軽く、密着感、暑苦しさを軽減する、歩装具を提供する。
【解決手段】側背面に穴を開けることにより、穴を開けた分だけ歩装具は軽くなり、また風通しもよくすること、歩装具の側背面に複数のジャバラをつけることにより、直接足に触れる部分と、触れない部分を作る事が出来、従来の側背面が全面的に足に触れるタイプに比べ足にとって、より通気性を持たせることが出来る。
(もっと読む)
足上げ歩行補助器
【課題】つまづきを防ぐように足の上げ下げがスムーズになるよう歩行を助ける足上げ歩行補助器を提供する
【解決手段】輪状にした2つのゴムベルトを金具で連結する。2つのゴムベルトは、1つは肩用1つは足かけ用とし、それぞれに調節金具をとりつけ身長に合わせて長さを変えられるようにする。長さを調節できる肩用ベルト7、足かけ用ベルト2を連結させ、足用ベルトに足の甲を固定させる部品6をつけたことを特徴とする足上げ歩行補助器
(もっと読む)
杖
【課題】 従来の杖は、石突を備えた着地板と、着地板に立設した可動式の杖本体と、杖本体に設けた握り部及び柄とで構成し、歩行時の杖として(体を支える道具)利用する。この構造では、体を支えるのみであり、積極的に、脚を補助することを意図しない。また、安定した歩行補助具としては、利用できない。
【解決手段】 本発明は、杖本体の上端に設けた把持部と、下端に設けた着地部と、上部に設けた腿当部と、で構成した杖であって、把持部・着地部・腿当部は、それぞれ、杖本体に昇降自在に設けるとともに、着地部は、杖本体に可動可能に設ける構成としたことを特徴とする杖である。従って、杖の寸法調整を可能となり、各人の脚、腿、又は腕の各長さに、確実にマッチングした構造を提案できる。
(もっと読む)
下肢動作支援装置
【課題】利用者への装着を簡易にすると共に、利用者の動作をより精度よく予測することができる下肢動作支援装置を提供する。
【解決手段】下肢動作支援装置は、利用者Pが着座するサドル部12を備え、利用者の体幹に装着される体装着部10と、利用者の大腿、膝関節及び下腿に沿って延伸し、大腿、膝関節及び下腿に対して非拘束状態となるように体装着部10に連結され、大腿リンク部30Lと下腿リンク部40Lとが膝関節部32Lを介して連結された脚リンク部20Lと、脚リンク部と連結され、利用者の足を載置固定する足載置部50Lと、大腿リンク部30L又は下腿リンク部40Lに設けられ脚リンク部20Lの延伸方向を軸として回転する旋回関節部36Lと、を備える。
(もっと読む)
歩行支援装置
【課題】自力で体重を支えきれなくなったときに膝関節が屈曲してしまうこと防止する歩行補助装置を提供する。
【解決手段】歩行支援装置100は、大腿リンク10、下腿リンク20、第1及び第2補助リンク30、40、及び、モータ55を備えている。第1補助リンク30は大腿リンク10に連結しており、第2補助リンク40は下腿リンク20に連結している。第1補助リンク30の先端は第2補助リンク40の先端に回転可能に連結している。大腿リンクと第1補助リンクの連結部の回転中心と、下腿リンクと第2補助リンクの連結部の回転中心の少なくとも一方は、膝関節回転軸を通る脚長手方向中心線よりも後方に位置している。さらに、ユーザが膝を伸ばしたとき、大腿リンクと第1補助リンクの連結部の回転中心、第1補助リンクと第2補助リンクの連結部の回転中心、及び、下腿リンクと第2補助リンクの連結部の回転中心が一直線に並ぶように構成されている。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
歩行支援装置
【課題】弾性エネルギを利用する歩行支援装置であってシンプルな構成の歩行支援装置を提供する。
【解決手段】歩行支援装置100は、靴2、靴底前プレート12、靴底後プレート22、及び、スプリング18と28を備えている。靴底前プレート12は、つま先と踵の間の位置で靴の側方に伸びる回転軸16で靴2に軸支されている。靴底前プレートの先端はつま先の下へ伸びている。靴底後プレート22は、つま先と踵の間の位置で靴2の側方に伸びる回転軸26で靴2に軸支されている。靴底後プレート22の先端は踵の下へ伸びている。靴底前プレート12と靴底後プレート22は、連動して互いに反対方向に回転するように係合している。スプリング18と28は、靴底前プレート12の先端と靴底後プレート22の先端を下方へ付勢するように配置されている。
(もっと読む)
段差乗り越え機構を備えた歩行器
【課題】歩行器を使用する際に障害となる段差を容易に乗り越えることができる歩行器を提供する。
【解決手段】
本体フレーム2と、本体フレーム2の上面に設けられた肘受け3と、本体フレーム2の下部に設けられた少なくとも1つの前側車輪部4及び一対の後側車輪部19とを有する歩行器1において、前側車輪部4は、本体フレーム2の幅方向に延在して設けられた支持軸5と、支持軸5周りの異なる位置に設けられると共に支持軸5の軸線と平行な車軸6に支持された複数の車輪7と、各車輪7に対応して設けられると共に各車輪7を回転自在に支持する複数の支持アーム8bであって支持軸5に支持されて支持軸5の軸線周りで回転可能に設けられた支持アーム8bと、支持軸5を回転駆動する駆動機構9とを有し、駆動機構9は、支持軸5に連結されたモータ10と、接地する車輪7を変更すべくモータ10の駆動を制御する制御装置11,14とを有する。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
91 - 100 / 562
[ Back to top ]