
国際特許分類[B05B12/00]の内容
処理操作;運輸 (1,245,546) | 霧化または噴霧一般;液体または他の流動性材料の表面への適用一般 (41,198) | 霧化装置;噴霧装置;ノズル (8,080) | 噴霧システムにおける放出制御手段の配置または特殊な適合 (354)
国際特許分類[B05B12/00]の下位に属する分類
放出時間制御または放出シーケンス制御のためのもの (38)
放出される液体または他の流動性材料,包囲媒体または標的の状態に応答するもの (102)
複数の液体または流動性材料の中から選んだ1つを単一の噴霧排出口に供給するためのもの (85)
国際特許分類[B05B12/00]に分類される特許
81 - 90 / 129
塗装設備及びそれを用いた塗装方法
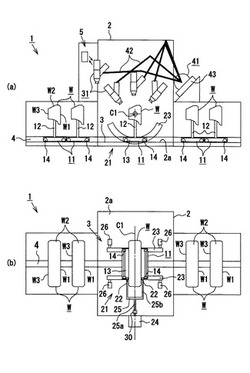
【課題】塗装用ロボットの数が少なくても所望の塗装を行うことができ、しかも塗装室を小型にすることができる塗装設備を提供すること。
【解決手段】本発明の塗装設備1は、塗装室2、ワーク揺動手段21、塗装機31、塗装用ロボット41等を備える。塗装室2には、ワーク支持体11により支持されたワークWが搬入される。ワーク揺動手段21は塗装室2に設置されている。ワーク揺動手段21は、塗装室2内に搬入されたワークWを、中心軸線C1を揺動中心としてワーク支持体11とともに揺動させる。塗装用ロボット41は、ロボットアーム42の先端に塗装機31を搭載している。塗装機31は揺動するワークWに対して塗料を吹き付ける。
(もっと読む)
移動する紙ウェブ又は厚紙ウェブにコーティングする装置

【課題】移動する紙ウェブ又は厚紙ウェブに、粘性の高いコーティング配合物を、平滑にコーティングする装置を得る。
【解決手段】紙、又は板紙の移動するウェブにコーティング配合物をコーティングする装置において、紙、又は板紙の移動するウェブの表面を支持する支持手段19,20と、コーティングするアップリケータユニット16とを具え、このアップリケータユニット16は、ウェブの幅にわたり配置された複数個の高圧無気式の噴霧ノズル17であって、各噴霧ノズルの噴霧パターンにおける噴霧ノズルから発射される微粒化噴霧がウェブ表面に接触するポイントでの直径がウェブの幅より小さいものとなるよう構成した該噴霧ノズルと17、ウェブの支持されていない側の表面に前記複数個の噴霧ノズルを包囲する寸法および形状を有してこれら複数個の噴霧ノズル17を包囲するよう位置決めしたノズル包囲体とにより構成する。
(もっと読む)
塗装システム
【課題】 ロボット装置に取付けられた塗装機の共通本体部に対して霧化ヘッド、カートリッジを交換するときに、共通本体部を交換位置に位置決めする。
【解決手段】 ロボット装置13に塗装機14の共通本体部15を取付ける。また、共通本体部把持装置33を霧化ヘッド交換洗浄装置31の固定板32に固定して取付け、共通本体部把持装置33により共通本体部15を把持して位置決めする構成とした。また、共通本体部把持装置33が共通本体部15を把持するときには、ロボット装置13の駆動力を低減し、外力を加えれば共通本体部15を自由に動かすことができるようにする。これにより、共通本体部把持装置33は、ロボット装置13の駆動力に抗して共通本体部15を交換位置Oに正確に位置決めすることができる。
(もっと読む)
塗装システム
【課題】 カートリッジ交換装置の揺動アーム部を円弧動させることにより、載置台と霧化ヘッド交換洗浄装置の交換位置との間でカートリッジを移動する。
【解決手段】 カートリッジ交換装置41は、カートリッジ24を把持するカートリッジ把持機構48Bを備えた揺動アーム部48と、揺動アーム部48を水平面上で揺動する円弧運動部46とを備えている。カートリッジ交換装置41は、カートリッジ把持機構48Bにより載置台42上の充填済みカートリッジ24を把持し、この状態で円弧運動部46により揺動アーム部48を交換位置Oに向けて移動する。これにより、載置台42と霧化ヘッド交換洗浄装置31の交換位置Oに配置された共通本体部15との間で、充填済みカートリッジ24と使用済みカートリッジ24′とを交換することができる。
(もっと読む)
作業補助装置
【課題】対象物を小さな操作力で移動させることができ、かつ対象物が設定された許容範囲を外れた場合でも安定して対象物を許容範囲内へ戻すことができる作業補助装置を提供する。
【解決手段】作業補助装置10は、対象物30を取り付ける多関節アーム11を備える。モータ36が発生するトルクがワイヤ32を介してリンク12aを鉛直上方に引っ張ることで重力によって多関節アーム11が鉛直方向に揺動することを抑制する。各関節14はリンク12が揺動する際の抵抗力を調整可能に付与する抵抗力付与機構16を備える。コントローラ22は対象物が許容範囲50内のときは抵抗力付与機構16が各関節に付与する抵抗力を小さくする。対象物が許容範囲50外のときは抵抗力を大きくする。抵抗力は多関節アーム11の動かし難さを調整するので各関節に付与する抵抗力を大きくしても対象物が操作力の方向とは反対の方向に移動することを防止できる。
(もっと読む)
静電塗装装置、及び、静電塗装装置の塗料汚れ防止方法
【課題】塗装ガンと、該塗装ガンを支持するロボットアームを具備する静電塗装装置につき、被塗装物へ向かわずに空中に浮遊する塗料ミストによる前記ロボットアームの汚れを防止するための新規な技術を提案する。
【解決手段】本発明に係る静電塗装装置1は、被塗装物9に対して塗料を噴霧する塗装ガン2と、前記塗装ガン2を前記被塗装物9に対して移動させるロボットアーム3とを具備し、前記塗装ガン2にて塗料(塗料ミスト)に電圧を印加させる構成であり、前記ロボットアーム3(第一アーム部3a)の表面に、前記塗料に印加される電圧と同極性の電圧が印加される構成とする。
(もっと読む)
塗装装置
【課題】塗料の色替機能を有する塗装装置であって、塗料容器から供給されて残存する塗料を塗料容器に還流して回収可能な塗装装置を提供する。
【解決手段】塗装機1の一端は、塗料を噴霧する噴霧口1aを有し、他端は塗装ロボットのアームA先端に接続する。第1塗料容器B1は、アームa内に着脱自在に設置し、各色毎に個別の塗料を収容する。各色毎に個別の塗料を第1塗料容器B1から噴霧口1aに供給する。第1塗料容器B1は、塗料を収容する塗料収容室2a及び溶剤を収容可能な溶剤収容室2bに内部を隔絶する可動弁20と、溶剤収容室2bに溶剤を供給すると可動弁20が移動して塗料収容室2aから塗料が流出する第1開口21と、を備える。第1ピグ1pは第1塗料容器B1から供給されて残存する塗料を第1塗料容器B1に還流して回収する。
(もっと読む)
吹付用アームロボット
【課題】製造コストを低減させつつ、作業員の操作負担を軽減させる吹付用アームロボットを提供する。
【解決手段】基台に旋回自在に軸支された第1のブラケット1と、該第1のブラケット1に起伏自在に軸支された第1のアーム2と、該第1のアーム2の先端に起伏自在に軸支され第2のブラケット3と、該第2のブラケット3に連結された第2のアーム4と、該第2のアーム4に連結された吹付ノズル支持アーム5と、を備え、前記吹付ノズル支持アーム5は、前記第2のアーム伸縮部41に伸縮自在に連結された吹付ノズル支持アーム伸縮部50と、該吹付ノズル支持アーム伸縮部50にアーム軸方向に回動自在に連結された吹付ノズル支持部51と、を備え、自動制御により、前記第2のアーム伸縮部41の先端を基準点BPとして、該基準点BPが前記トンネル坑内の断面における同一平面上を略円運動するように構成する。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
塗装ロボット
【課題】 アームに空気の流れがあたったときの気流の乱れを抑制し、ムラのない品位の高い塗装作業を遂行できるようにする。
【解決手段】 塗装ロボット10のベース部11を最上位の位置に配置し、ベース部11から水平多関節アーム12を垂設し、細長いロッド状で伸縮可能な上下アーム18を水平多関節アーム12の先端部に設け、上下アーム18の下端部に塗装ガン22を設ける。
(もっと読む)
81 - 90 / 129
[ Back to top ]