
国際特許分類[B05B12/00]の内容
処理操作;運輸 (1,245,546) | 霧化または噴霧一般;液体または他の流動性材料の表面への適用一般 (41,198) | 霧化装置;噴霧装置;ノズル (8,080) | 噴霧システムにおける放出制御手段の配置または特殊な適合 (354)
国際特許分類[B05B12/00]の下位に属する分類
放出時間制御または放出シーケンス制御のためのもの (38)
放出される液体または他の流動性材料,包囲媒体または標的の状態に応答するもの (102)
複数の液体または流動性材料の中から選んだ1つを単一の噴霧排出口に供給するためのもの (85)
国際特許分類[B05B12/00]に分類される特許
121 - 129 / 129
塗装システム
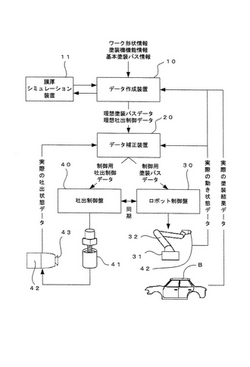
【課題】塗料ポンプの制御を工夫し、制御データの最適化に要する時間を極力短縮する。
【解決手段】ロボット制御盤30は、制御用塗装パスデータに基づいて、ロボット31を制御する。これによって、制御用塗装パスデータに基づく塗装パスに沿って塗装機42が移動することになる。一方、吐出制御盤40は、制御用吐出制御データに基づいて、シリンダポンプ41を制御する。これによって、制御用吐出制御データに基づく塗料の吐出が塗装機42で実現される。ここで、ロボット制御盤30による制御開始からカウントされる時間情報に基づいて、吐出制御盤40がシリンダポンプ41を制御する。つまり、シリンダポンプ41の制御がタイマ制御とし、吐出制御データを、塗装パスデータから独立させる。
(もっと読む)
塗装スピンドルのコーディング
粒子で表面を被覆するための装置は、電気モータによって駆動されるスピンドルシャフト(4)を備え、該スピンドルシャフト(4)の回転時に粒子を送り出す手段が前記スピンドルシャフト(4)に設けられている。この装置は、塗装スピンドル(2)内に組み込まれたモータ制御部(34)が、前記電気モータの電源によって読み取り可能な特定コードを含むことを特徴とする。  (もっと読む)
(もっと読む)
塗料又は粉体を車体に塗装するステーション

本発明は塗料又は粉体を車体に塗装するためのステーション(15)に関する。上記ステーションはそれらが通るステーションの領域において停止することなくそれぞれの車体(2)が輸送方向(A)に従って移動するのを・∫能にする少なくとも1つの車体輸送装置(2)と、少なくとも1つの噴霧装置(25)と第一の監視手段を備える少なくとも1つの噴霧ロボット(16)を備える。本発明は、ステーション(15)が少なくとも4台の開放装置或いは操作用サッシを備え、それぞれが輸送方向(A)に平行に移動するのを可能にする第二の監視手段(32、33、35、40、42、45)と適合していて、上記第二の監視手段は、噴霧ロボット(16)を監視するための第一の手段と分離されていることを特徴とする。 (もっと読む)
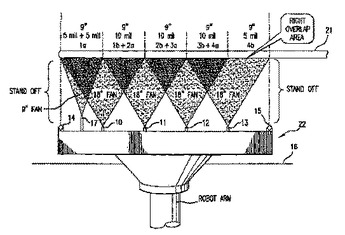
大表面に対して費用効果の高い自動下処理及び塗装方法
乾ドックにある船の船体などの大型の構造体を下処理及び塗装する装置及び方法であって、アレー状に設けられた複数のスプレーガンが、スプレーパターンが重なるように処理する表面に沿って一定の間隔にてロボットアームによって配置される。スプレーガンのアレーを下方向に移動させてストリップを塗装した後、スプレーガンを締めて水平に移動し、次に最初のストリップに隣接して重なっている別のストリップが塗装されるまで、作動させて上方向に移動させる。これらの工程は、実質的に表面領域の全体が塗装されるまで繰り返される。塗料スプレーしぶきや他の過剰な塗料を収集するためのシュラウドが提供され、アレー集合体に取り付けられる。補助スプレーガンを配置して、スプレーガンのアレーから発せられる元々のスプレーパターンの欠けていた領域に塗料を塗布するようにそのスプレーパターンを調節してもよい。作業表面に沿ったシステムの移動は基準軌道により行われ、この基準軌道は仮想のものでも現実のものでもよく、それに沿って無人プラットホームが移動する。無人プラットホームがコンピュータ制御式関節アームを支持し、該アームが前記集合体を支持する。船体を塗装する前に船体を洗浄するために、選択的に別のツールをアームに作動可能に連結してもよい。
 (もっと読む)
(もっと読む)
樹脂成形品の生産システム
【課題】 樹脂成形品に塗装又は印刷を施す場合、樹脂成形品を塗装工場又は印刷工場に搬送しなければならないという問題があった。
【解決手段】 建物の内部に設置され、樹脂成形品を製造する成形装置と、建物の外部において成形装置の近傍に配置した塗装車輌内に搭載された塗装装置とを、着脱可能な搬送装置で連結し、成形装置によって製造された樹脂成形品に対して、塗装装置によって塗装を施したので、成形工程により製造された樹脂成形品をそのまま塗装車輌に搭載された塗装工程に導いて塗装を施すことができ、成形工程と塗装工程間の仕掛かり在庫をなくし、ハンドリングや埃等の付着による不良の発生をなくすことができる。
(もっと読む)
スプレー塗装装置
コンベヤー2によって移動される円形の対象物の正面/背面16、特に、ホール及びリム4の正面16をスプレー塗装するためのスプレー塗装装置。スプレー装置80,81が、弓形に往復回転可能であり、駆動回転軸線66に対して偏心している。対象物4の駆動回転軸線66及び中心軸線14は互いに一直線である。  (もっと読む)
(もっと読む)
薄膜塗布方法及びその制御装置
【課題】 基板周縁部ではノズルによる薬液の噴霧密度を低くして塗布することによって、基板全面に亘って膜厚が均一な薄膜の塗布を可能にしようとする薄膜塗布方法及びその制御装置を提供することである。
【解決手段】 薬液を噴霧するノズル1と基板2とを相対移動させて該基板2の表面に薄膜を塗布する方法であって、上記薬液の基板2面に対する噴霧密度が、上記基板2の中心部よりも周縁部2a〜2dで低くなるようにして塗布するようにしたものである。これにより、基板2の周縁端部2aから2dにおける薄膜の盛り上がりを抑制し、基板全面に亘って膜厚の均一化を図ることができる。
(もっと読む)
ロボットティーチング棒
【課題】ロボット塗装において、スプレーガンを使用して塗装ロボットの近距離塗装のティーチングを行う場合に、吹き付け距離の近距離設定が容易に行えると共に、万一塗装物と接触した場合においても、塗装物の破損/落下・コンベアの損傷、あるいはスプレーガンの損傷・ロボットの故障・ティーチング棒の折損等の異常を生じてしまうことのないティーチング棒を提供する。
【解決手段】ロボット塗装時のスプレーガンの先端に取り付けするためのホルダーに棒状の可撓性部材をスプレーパターンの中心方向を示すように取り付けた。また、前記可撓性部材が片側に等間隔に突起部を形成した樹脂製の帯状体を該突起部同士が噛み合うように折り曲げて棒状にした。
(もっと読む)
作業装置
121 - 129 / 129
[ Back to top ]