
国際特許分類[B05B12/00]の内容
処理操作;運輸 (1,245,546) | 霧化または噴霧一般;液体または他の流動性材料の表面への適用一般 (41,198) | 霧化装置;噴霧装置;ノズル (8,080) | 噴霧システムにおける放出制御手段の配置または特殊な適合 (354)
国際特許分類[B05B12/00]の下位に属する分類
放出時間制御または放出シーケンス制御のためのもの (38)
放出される液体または他の流動性材料,包囲媒体または標的の状態に応答するもの (102)
複数の液体または流動性材料の中から選んだ1つを単一の噴霧排出口に供給するためのもの (85)
国際特許分類[B05B12/00]に分類される特許
21 - 30 / 129
塗装ロボット用保護カバー
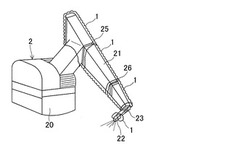
【課題】 塗料ミストなどの吸着性に優れ、かつ塗装ロボット動作時に破れることがない塗装ロボット用保護カバーを提供する。
【解決手段】 塗装ロボット用保護カバーは、合成樹脂からなるフィラメント糸をニット編みしてなる伸縮可能な編物地に、半固体状組成物を含浸させて付着させてなる。半固体状組成物は、ペトロラタム、又はペトロラタムとポリエチレングリコールとの混合物からなるとよい。保護カバー1は、例えば、塗装ロボット2のアーム部21や、塗装ガン22などを被覆する。
(もっと読む)
エアーブロー装置

【課題】洗浄ライン上を搬送されるワーク全体の水切りを行うと共にエアーブロー位置を局所的にエアーブローしても、エアー消費量を少なくする。
【解決手段】外周面11aに3つのノズル12A、12B、12Cが設けられたノズルヘッド11が回転プレート13によってノズル筐体14に回転可能に取り付けられ、3つのノズル12A、12B、12Cそれぞれに別系統でエアーを供給するように当該ノズルの数だけエアー導入経路15A、15B、15Cがノズル筐体14内に設けられたエアーブロー用自動ガン1と、ノズル筐体14に固定されエアーブロー用自動ガン1をワークWの所定のエアーブロー位置に移動させる移動手段2と、ノズル筐体14に内蔵されると共に回転プレート13に固定され、当該回転プレート13を回動させる回動手段3とを備えている。
(もっと読む)
塗装システム
【課題】装置の複雑化等を招くことなく、スプレーパターンの幅や塗料の厚さを素早く変更することができ、ひいては塗装不良の発生抑制や塗装精度の向上等を図る。
【解決手段】塗装システム1は、塗装機2と、被塗装物の被塗装面に対し塗装機2を相対移動させるロボットアーム31とを備える。塗装機2は、塗料を噴射するための塗料噴射口を有してなる塗料通路、及び、塗料噴射口の外周側に位置するエア噴射口を有してなるエア通路を備える。エア噴射口から噴射されるエアの方向は、塗料噴射口に至る直前の塗料通路の延び方向と同一方向される。また、塗装システム1は、塗料の単位時間当たりの噴射量を調節可能な塗料供給量調節手段4と、エアの単位時間当たりの噴射量を調節可能なエア供給量調節手段5と、被塗装面と塗装機2との相対位置に応じて、両調節手段4,5を制御する制御手段7とを備える。
(もっと読む)
静電塗装装置および静電塗装装置の塗料汚れ防止方法
【課題】ロボットアームの周囲に直接塗料ミストと間接塗料ミストが混在している状況において、静電塗装装置の塗料汚れを確実に防止することができる静電塗装装置および静電塗装装置の塗料汚れ防止方法を提供する。
【解決手段】コントローラ9bは、ロボットアーム4の周囲に異なる特性を有する複数種類の塗料ミスト(例えば2種類の各塗料ミスト)が混在している場合において、高電圧発生部9aにより発生する電圧を、各塗料ミストのそれぞれの特性に応じた複数の電位に、ロボットアーム4の周囲に存在する塗料ミスト(即ち、各塗料ミストが混在する塗料ミスト)の性状に応じた所定の周期でパルス状に変更する。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
シーラ塗布装置
【課題】正確にシーラ塗布できるシーラ塗布装置を提供すること。
【解決手段】ワークに対してシーラを吐出する塗布ノズル65を備えるシーラ塗布装置1において、供給管71には、前記塗布ノズル65近傍に配置された切替バルブ74と、当該切替バルブ74よりも前記塗布ノズル65から離間した位置に配置されたカットオフバルブ76と、が設けられ、シーラの吐出または遮断に際して、前記切替バルブ74の動作タイミングと前記カットオフバルブ76の動作タイミングとを離間させる制御部75を備えることを特徴とするシーラ塗布装置1である。
(もっと読む)
アトマイザーの回転速度および高電圧の動的適応を伴うコーティング方法およびコーティング装置
本発明は、コーティングシステムにおけるアトマイザー(4)によって構成部品の部品表面をコーティング剤でコーティングする、具体的には車両部品を塗料で塗装するコーティング方法およびコーティングシステムに関連し、以下のステップを含む。コーティングされる構成部品の部品表面上でアトマイザー(4)を動かすステップ、または、噴霧ジェット内の構成部品を動かすステップ、それによってアトマイザー(4)によって部品表面にコーティング剤を塗布するステップ。アトマイザー(4)は少なくとも1つの電気的および/または力学的操作変数(U、Q+、Q−)によって操作され、コーティング剤の静電チャージ用の一定の高電圧(U)および/またはアトマイザー(4)の回転する噴霧要素の一定の回転速度を含む。本発明によれば、アトマイザー(4)の電気的および/または力学的操作変数(U、Q+、Q−)はアトマイザー(4)の動作中に動的に変化する。 (もっと読む)
塗装制御装置、塗装システム、及び塗装制御方法
【課題】遠隔操作のためのスイッチを別途設けることなく従来の塗装用手吹きガンから付随装置を遠隔操作できる塗装制御装置、塗装システム、及び塗装制御方法を提供する。
【解決手段】塗装用手吹きガン10を備えて構成される塗装設備に含まれる付随装置11を制御する塗装制御装置14であって、塗装用手吹きガン10のトリガ15の操作パターンを検知する検知手段13と、検知手段により検知された操作パターンに基づいて付随装置11を制御する制御手段16と、を備える。
(もっと読む)
塗装装置、塗装方法、及びその被塗装物
【課題】被塗装物を効率的に塗装する塗装装置、塗装方法、及びその被塗装物を提供することを課題とする。
【解決手段】被塗装物8を塗装する塗装装置1であって、被塗装物8へ塗料を吹き付ける塗料吹き出し部4A,Bと、塗料吹き出し部4A,Bの塗料の吹き出し方向を一定に保った状態で、塗料吹き出し部4A,Bを被塗装物8に対して吹き出し方向と異なる方向へ相対移動させる移動手段5A,Bと、被塗装物8の塗膜の厚さが略均一となるように、塗料吹き出し部4A,Bと被塗装物8との相対速度を、塗料吹き出し部4A,Bと被塗装物8の被塗装面との間の距離に応じた所定速度に制御する制御手段7と、を備える。
(もっと読む)
塗装用ロボットのティーチング装置、及びティーチング方法
【課題】熟練した技能者が塗装用手吹きガンを用いて塗装対象物を塗装したときの塗装用手吹きガンの動きを塗装用ロボットに容易に再現させる。
【解決手段】塗装用手吹きガン10に取り付けられて塗装用手吹きガン10に作用する加速度を時系列で検出する加速度センサ(図中の加速度・角速度検出部14内に収容されている)と、加速度センサにより検出された加速度を記憶する記憶手段(図中の制御装置13内に収容されている)と、記憶手段に記憶されている加速度に基づいて、塗装用ロボット20に塗装用手吹きガン10の動きを再現させるための位置制御データを生成する生成手段(図中の制御装置13内に収容されている)と、を備える。
(もっと読む)
21 - 30 / 129
[ Back to top ]