
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
111 - 120 / 964
ロボット制御装置、ロボット制御方法、およびプログラム
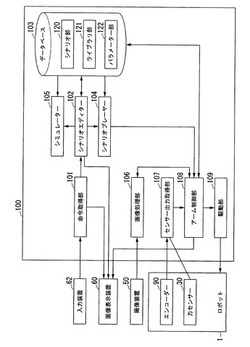
【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
移動ロボットシステム、移動ロボット制御装置、該制御装置に用いられる移動制御方法及び移動制御プログラム

【課題】高度な計算処理装置や操作者による画面の連続的な注視を必要としない移動ロボットシステムを提供する。
【解決手段】タッチパネル22は、操作者が押下することにより、表示されている画面内の任意の位置を指定可能な構成とされている。
タッチパネル22に表示されている画面内にある任意点の位置を操作者が指定(画面タッチ)したとき、任意点の位置に対応する実際の位置を目標位置(目標地点P)として、ロボットの移動機構を制御して同ロボットを自動的に移動すると共に、操作者の手動による操作に対応して移動機構を制御するための融合型操作インタフェース(タッチパネル22、マニュアル操作部23)が設けられている。
(もっと読む)
作業システム
【課題】作業システムの設備コストを抑えること。
【解決手段】作業システム1は、作業対象であるワークに対して所定の作業を行うロボット12と、ワークに対する所定の作業が行われる場所である複数の作業ステーション13a〜13dとを備える。そして、ロボット12は、作業ステーション13b,13cにおいてワークに対して圧入作業やネジ締め作業といった所定の作業を行うだけでなく、作業ステーション13a〜13d間でのワークの搬送も併せて行う。
(もっと読む)
ロボット装置
【課題】 人の表情から人の情動を認識し、情動同調の手法を利用して制御するロボット装置を提供する。
【解決手段】 ユーザに視認させる表情を表出する表出部12aと、ユーザの表情に基づいてユーザの情動状態を解析する情動認識部20と、ロボットの情動状態を、情動認識部20によって認識されたユーザの情動状態に誘導するようにロボットの情動状態を生成する情動生成部22と、情動生成部22により生成されたロボットの情動状態に基づいて、ロボットから表出させる表情を生成する情動表出部24とを備える。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
ロボット搬送装置
【課題】搬送動作途中の停止位置から、ロボットが干渉することなく、動作開始位置へ戻ることが簡単にできるロボット搬送装置を提供する。
【解決手段】ロボット50とロボット制御装置100と搬出プログラム24aとプログラム実行手段と前進方向又は後退方向を設定する実行方向設定手段とワークの搬送状態検出手段とからなるロボット搬送装置1において、搬出プログラム24aの実行による搬送動作が停止され、停止位置からの復帰動作は、ワークの搬送状態検出手段により、搬送状態を取得し、非搬送中ならば、搬出プログラム24aの停止ステップから先頭ステップまで、後退方向に実行して搬出動作の始点に移動し、搬送中ならば、搬出プログラム24aの停止ステップから末尾ステップまで、前進方向に実行して搬送動作の終点に移動する。
(もっと読む)
ロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法
【課題】ロボットが有する駆動源の駆動量と実際のロボットの状態とを画像に基づいて対応付ける処理の効率を高めることの可能なロボット用位置検出装置、ロボットシステム、及びロボット用位置検出方法を提供する。
【解決手段】
水平多関節ロボット10(ロボット10)用位置検出装置は、撮像対象であるロボット10又はワークWを撮像するカメラ22と、撮像対象の位置を画像から算出する制御部33と、ロボット10の第1及び第2モーター11a,13aの駆動量を取得するI/O31と、撮像対象の算出位置と駆動量とを対応付けて記憶する。上記カメラ22及びI/O31には、撮像対象の位置を検出するための共通するトリガー信号が入力される。カメラ22は、トリガー信号の入力によって撮像対象の撮像を開始する一方、I/O31では、同トリガー信号の入力によって制御部33が駆動量を得る。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体の種々の初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コストで求めることのできる軌道計画システム、及び求めた軌道にしたがって目標状態までの軌道を制御することのできる軌道計画・制御システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、該目標状態に至るまでの状態を枝として、予め区分された状態空間の複数のセルのそれぞれに一つの枝を有する探索木を予め作成する探索木作成部(101)と、該探索木を記憶する探索木記憶部(103)と、該物体の現在の状態を求め、該現在の状態に対応する該探索木の枝を求め、該現在の状態に対応する該探索木の枝から該根までの探索木上の経路を、物体の軌道として求める軌道作成部(105)と、を備える。軌道計画・制御システムは、さらに目標状態までの軌道を制御する軌道制御部(107)を備える。
(もっと読む)
111 - 120 / 964
[ Back to top ]