
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
131 - 140 / 964
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
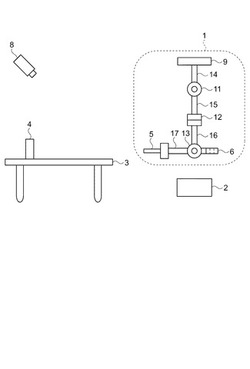
ワーク取り出し方法

【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
ロボットによるサービス提供システム、ロボット管理装置及びロボット管理方法
【課題】人間のように柔軟性の高い知識構造を実現可能とする。
【解決手段】ロボット3によるサービス提供システム1は、それぞれ異なる性質の情報元から得られる情報に基づいて各レイヤーが生成され、かつ、各レイヤーにおいて、所定の観点から要素間の関係性が構築されている複数のレイヤーであって、当該複数のレイヤーを備える知識NW11と、ユーザからの要求タスクに含まれる情報に基づいて、知識NW11が備えるレイヤーから前記情報に関連する要素を抽出し、その抽出した要素と前記情報との関係性を記述することで、要求タスクに応じたタスクベースオントロジーを生成するオントロジー生成部12と、生成したタスクベースオントロジーを用いて、ロボット3の動作を制御するロボット動作制御部13と、を備える。
(もっと読む)
アンドロイド制御システム
【構成】 アンドロイド制御システム10はアンドロイド12を含み、アンドロイド12は人間の代役として或る場所に配置される。通常、アンドロイド12は、制御装置14の制御に従って、人間との間で対話するなどのコミュニケーションを図る。ただし、アンドロイド12自身が対応できない場合には、その旨を遠隔オペレータに通知する。かかる場合には、遠隔オペレータの指示に従って、アンドロイド12は動作される。また、アンドロイド12は、たとえば、その近傍や周囲に人間が存在しない場合や遠隔オペレータからの指示がない場合には、制御装置14の制御に従って無意識動作を実行する。つまり、瞬きや呼吸のような生理的な動作をしたり、髪を触るなどの癖による動作をしたりする。
【効果】 無意識動作のようなアンドロイド特有の動作を実現できる。
(もっと読む)
ロボットの移動制御システム、ロボットの移動制御プログラムおよびロボットの移動制御方法
【構成】移動制御システム100は、役割データベース(20)を備える中央制御装置10および役割が設定されたロボット14を有する。また、役割データベース(20)は、役割を持った人間の代表移動行動データから構成される。たとえば、ロボット14に「話しかけやすい警備員」の役割が設定されている場合、「話しかけやすい警備員」の代表移動行動データが役割データベース(20)から選択される。また、中央制御装置10では、役割が設定されたロボット14の複数の将来位置および各将来位置における行動が代表移動行動データに基づいて予測され、予測された複数の行動のそれぞれの発生確率が算出される。そして、算出された発生確率に基づいて、ロボット14に移動行動が指示される。
【効果】システムの管理者は、役割が設定されたロボット14を、同じ役割を持った人間と同じように動作させることができる。
(もっと読む)
移動ロボット
【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
ネットワークロボットのプリング方式に基づくロボットソフトウェアを管理するためのシステム及びその方法
【課題】ネットワークロボットのプリング方式に基づくロボットソフトウェアを管理するためのシステム及びその方法を提供する。
【解決手段】本発明に係るプリング方式に基づくロボットソフトウェアを管理するためのシステムは、少なくとも一つのロボットソフトウェアを格納するソフトウェア格納装置;前記ロボットソフトウェアの設置またはアップデートが可能なサービスロボットに対するプロファイル情報を格納するプロファイル格納装置;および前記プロファイル情報に基づいて、ロボットソフトウェアの属性値を設定または変更し、その属性値が設定または変更されたロボットソフトウェアを該当サービスロボットに伝送するソフトウェア管理装置;を備えることを特徴とする。
(もっと読む)
131 - 140 / 964
[ Back to top ]