
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
171 - 180 / 964
サービス提供システム及びサービス提供方法
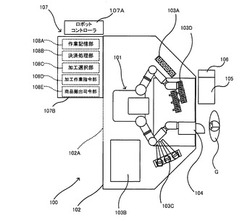
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
ロボット装置

【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
ロボットの制御方法、ロボットの制御プログラムおよびロボット
【課題】ロボットに自然な感情を表現させるロボット制御技術を提供する。
【解決手段】複数の感情に対応する軸を有する感情空間を用いて、ロボットに感情を表現させるロボットの制御は、記録部に記録した感情空間の座標により示される感情点により1つの値が決まる関数であるポテンシャル情報を取得し、ポテンシャル情報が有する感情点により1つの値が決まる関数と、現在の感情点を用いて、該現在の感情点における勾配ベクトルを求め、勾配ベクトルが示す移動量と方向と、現在の感情点とを用いて、次の感情点を求める。
(もっと読む)
自動装置とその制御方法
【課題】あらゆる動作をシームレスで滑らかに実行できる自動装置とその制御方法。
【解決手段】出力ユニット10と、格納ユニット12と、制御ユニット14とを備える。格納ユニット12は、コマンドに対応していてN個の所定動作情報とN個の時間タグとを記録している動作パターン120を格納している。制御ユニット14は、コマンドを受信し、出力ユニット10の現行動作情報を読み取り、コマンドと現行動作情報とに従って格納ユニットにおいて動作パターン120を調べ、現行動作情報がi番目の所定動作情報と(i+1)番目の所定動作情報との間にあることを判断し、(i+1)番目の所定動作情報と(i+1)番目の時間タグと現行動作情報とによって時間調整情報を計算し、現行動作情報と、1番目の時間タグからi番目の時間タグまでと、時間調整情報とに従って、(i+1)番目の所定動作情報を実行するように出力ユニット10を制御する。
(もっと読む)
ツールパラメータ導出装置,ロボット
【課題】ロボットの多関節マニピュレータのアーム先端のフランジ面の回転中心に取り付けられたツールの並進成分の寸法を自動的に導出することのできるツールパラメータ導出制御装置及びこれを備えたロボットを提供すること。
【解決手段】3箇所以上の位置でツール11と平板治具50との接触がツール接触検出部40で検出されるまでのベース座標系BのZb軸方向の移動量を取得し,該移動量に基づいて平板治具50のベース座標系Bに対する傾きを算出する。そして,その傾きに基づいて平板治具50と平行及び垂直な作業座標系Wを設定し,作業座標系Wにおいてフランジ面12の回転中心Pを複数の位置姿勢に位置決めした状態でツール11と平板治具50との接触がツール接触検出部40で検出されるまでの作業座標系WのZ軸方向の移動量を取得し,該移動量に基づいてツール11の並進成分の寸法を導出する。
(もっと読む)
ロボット本体のキャスティング方法及び装置
【課題】 到達が困難な位置に、ロボット本体を正確に移動させることができ、災害救助や宇宙空間の作業等に広く応用することを可能にする。
【解決手段】 ロボット本体の初期位置と、ロボット本体の目標到達位置の3次元座標とに基づいて、少なくとも3カ所の目標固定位置を決定し、ワイヤの先端に設けられたグリッパあるいはアンカーをそれぞれの目標固定位置に固定し、ロボット本体と目標固定位置との間をそれぞれワイヤで連結する。次にロボット本体の目標キャスティング軌道を演算し、ワイヤのうち、少なくとも2本のワイヤの張力をそれぞれの目標値に制御し、各ワイヤにより張力拮抗状態を形成する。その後張力拮抗状態にあるワイヤのいずれかの固定を解除し、蓄積された弾性エネルギにより、ロボット本体を3次元空間にキャスティングするとともに、ロボット本体の3次元空間での運動を、各ワイヤの繰り出し量、巻き取り量、あるいは張力を別個に制御する。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの運動中に、複数の必要条件を満足させることが可能となる各脚体の先端部の運動軌道を効率よく決定しつつ、前記複数の必要条件を満足させる目標歩容を生成する。
【解決手段】脚式移動ロボット1の脚体2のうちの遊脚の先端部(足平22)の目標着地位置の第1着地許容領域と第2着地許容領域とを決定し、これらの着地許容領域が重なり合う領域に目標着地位置を決定し、ロボットの目標歩容を生成する。第1着地許容領域は、幾何学的脚体運動必要条件を満足するように決定される。第2着地許容領域は、床反力の構成要素である所定の床反力要素に係わる運動系属性必要条件と床反力要素許容範囲条件とを満足させ得るように決定される。
(もっと読む)
自動溶接装置における溶接トーチ位置決め方法
【課題】 枝管が傾いていても、溶接個所に対する溶接トーチの角度を一定にする。
【解決手段】 ロボットハンド12の先端部の旋回台13に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付け、その反対側に探触子14を設ける。枝管溶接機4の溶接トーチ11の先端より突出する溶接ワイヤ15の先端を、現実の空間の或る1点に保持してロボットのマスタリングを行い、枝管溶接機4について、その点を原点Oとし且つ溶接トーチ11の円周動作の軸心位置に座標軸を備えたツール座標系16を設定する。ツール座標系16における溶接トーチ11の円周動作の軸心位置に対応する座標軸を、センシングにより検出された母管1に仮付けした枝管2の鉛直方向からの傾きに一致させる座標変換を行った後、馬蹄型ガイド5を溶接対象の枝管2に外嵌させて、溶接トーチ11の円周動作の軸心方向を、枝管2の軸心方向に一致させる。
(もっと読む)
学習制御システム及び学習制御方法
【課題】他からの教示を効率的に覚えることができ、かつ、教示された内容を試行錯誤に組み合わせながら学習を行なうことができる学習制御システムを提供する。
【解決手段】学習制御システムは、報酬を得たときの一連の状態・行動対の集合をイベント・リストとして保持するイベント・リスト・データベース105と、状態・行動対をイベント・リスト・データベースに記憶させるイベント・リスト管理部101と、各イベント・リストの要素である状態・行動対の報酬期待値を更新するイベント・リスト学習制御部107と、イベント・リストを使用して第1の行動価値関数を求める行動計画部108と、強化学習に基づいて第2の行動価値関数を求める強化学習部111と、該行動計画部から受け取った第1の行動価値関数及び該強化学習部から受け取った第2の行動価値関数に基づいて行動を選択する行動選択部113と、を備える。
(もっと読む)
171 - 180 / 964
[ Back to top ]