
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
151 - 160 / 964
ロボティックスーツ
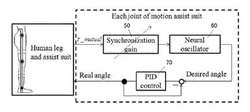
【課題】人体の運動機能の補助、歩行アシスト等を好適に行えるスーツとして、人との同調性を高めたロボティックスーツを提供する。
【解決手段】人体の屈曲可動部位に対応して配置される関節部と、前記関節部間を連結して人体に装着されるリンクと、前記関節部を支点として前記リンクを回動するアクチュエータと、人体とスーツとの相互作用力を検出するセンサとを備え、前記アクチュエータの駆動を制御する制御系として、前記センサによって検出された前記相互作用力に基づいて、人とスーツとの同調の度合いを調整する調整部50と、調整部50により調整された入力に同調する出力を算出する解析部60と、解析部60の出力に基づき、前記アクチュエータをフィードバック制御する制御部70とを備える。
(もっと読む)
基板を処理するクラスタツールアーキテクチャ

【課題】システムスループットを増加させ、処理シーケンスCoOを低減する機器を提供する。
【解決手段】実施形態は、一般的に、スループットを増加させ、信頼性を増加させたマルチチャンバ処理システム(例えばクラスタツール)を使用して基板を処理する機器および方法を提供する。クラスタツール内で処理される基板は繰り返し可能性が高く、システムフットプリントが小さい。クラスタツールの一実施形態では、基板をまとめてグループ化して移送することで、基板を2枚以上のグループ毎に処理してシステムスループットを増加することにより、また、処理チャンバの間で基板のバッチを移送する際の動作数を低減することで、ロボットの疲労を低減し、システムの信頼性を増加させることにより所有権のコストが低減される。実施形態はまた、システムの停止時間を低減し、基板移送処理の信頼性を増加させるために使用される方法および機器を提供する。
(もっと読む)
1つ以上の人間型ロボットの同時経路検討
【課題】複数の独立する課題を備える協働作業課題を実行するためのロボットシステムを提供すること。
【解決手段】ロボットシステムは、複数のロボットジョイントを有し、ロボットジョイントの各々は、協働作業課題の実行中に独立に制御可能であり、ロボットシステムはさらに、協働作業課題の実行中に前記ロボットジョイントの運動を制御するコントローラを有し、コントローラは、自動的に、ロボットジョイントを課題に特化したサブシステムにグループ化し、課題実行分岐部に到達した際に複数の独立した課題を課題に特化したサブシステムに割り当て、前記課題実行分岐部に到達した後に、課題に特化したサブシステムの、課題に特化したそれぞれのサブシステムによる独立した実行を調整する様に構成した。
(もっと読む)
ロボット装置
【課題】2つのリンクの長さが異なっても、迅速にスティフネス特性を示す楕円を求める。
【解決手段】記憶部4には、第1の剛性指令値U1を求める第1の演算式、第2の剛性指令値U2を求める第2の演算式及び第3の剛性指令値U3を求める第3の演算式が記憶されている。各演算式は、スティフネス楕円の短軸及び長軸のうちの一方の軸が、直交座標系のx軸に平行となる条件での連立方程式を各剛性指令値について解くことにより導き出したものである。減算部3は、第1の揺動角度の値θ1*から目標標傾斜角度の値φ*を減算した値を新たな第1の揺動角度値θ1*’としている。そして、演算部2は、各演算式に、各値を代入する際に、第1の揺動角度値θ1*’を代入して、スティフネス楕円の軸が目標標傾斜角度の値φ*傾いた各剛性指令値U1,U2,U3を求める。
(もっと読む)
ロボット制御システム
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Bは、ワークWを受け取る受取り部と、ワークWを引き渡す引渡し部とを備える。システム20Bは、システム20Aの引渡し部からシステム20Bの受取り部へワークWを受け渡すロボット30Bと、受取り部から引渡し部へワークWを搬送するベルトコンベア22Bと、ワークWに対して作業を行う作業装置21Bとを備える。システム20Bは、ロボット30Bに設けられたRFIDタグ33Bと、ロボット30BがワークWを受取り部へ受け渡す際に、RFIDタグ33Bの情報を無線で読み込むリーダライタヘッド23Bと、ロボット30BがワークWを引渡し部から引き渡す際に、RFIDタグ33Bに情報を無線で書き込むリーダライタヘッド25Bと、を備える。
(もっと読む)
荷物移送用ロボットと該ロボットの制御方法
【課題】棚の上などにおいた荷物を所定位置に好適に押すことのできる荷物移送用ロボットを提供する。
【解決手段】荷物移送用ロボット1であって、車輪2dを有するベース2と、ベース2に対して傾動可能に設けられるボディ3と、ボディ3をベース2に対して傾動させる傾動装置8と、ボディ3に対して動作可能に設けられるアームと、アームをボディ3に対して動作させる動作装置10,11と、制御装置12を有する。制御装置12は、傾動装置8を制御してボディ3をベース2に対して傾動させてボディ3の傾動方向の反対側にスペース18を形成し、かつスペース18を形成した時に動作装置10,11を制御してスペース18にアームの一部または全部を移動させる制御モードを有する。
(もっと読む)
ロボットシステム
【課題】ワークを搬送しつつ、各工程でワークに対して作業を行うロボットシステムにおいて、設備の取り外しや追加の手間を減らす。
【解決手段】ロボットシステム20Aは、ワークWをシステム20Fから受け取るとともに、ワークWをシステム20Bへ引き渡す載置台22Aを備える。システム20Aは、システム20Aの載置台22Aからシステム20Bの載置台22BへワークWを受け渡すロボット30Aと、載置台22AにおいてワークWに対して作業を行う作業装置21Aとを備える。システム20Aは、ロボット30Aに設けられたRFIDタグ33Aと、ロボット30FがワークWを載置台22Aへ受け渡す際に、RFIDタグ33Fの情報を無線で読み込むリーダライタヘッド25Aと、ロボット30AがワークWを載置台22Aから引き渡す際に、RFIDタグ33Aに情報を無線で書き込むリーダライタヘッド25Aと、を備える。
(もっと読む)
歩行支援装置
【課題】ユーザがイメージする歩行動作とうまく同期して脚装具を揺動することができる歩行支援装置を提供する。
【解決手段】歩行支援装置は、脚装具とアクチュエータとコントローラを備える。脚装具は、ユーザの大腿と下腿に夫々装着される大腿リンクと下腿リンクが回転ジョイントによって揺動可能に連結されている機構を有する。アクチュエータは、回転ジョイントの回転軸周りに下腿リンクを揺動させる。コントローラは、下腿リンクの揺動角が、遊脚膝角度の一歩分の経時的変化を記述した目標パターンに追従するようにアクチュエータを制御する。コントローラは、脚装具を装着した脚の足の腰位置に対する前後方向相対位置が、腰位置よりも第1距離閾値以上前方に移動した後に、腰位置よりも第2距離閾値以上後方に移動したことを条件として、前記目標パターンへの追従制御を開始する。
(もっと読む)
真空処理装置
【課題】真空処理装置において、試料の位置ずれが発生した際にそのずれ量を抑制し、予期しない搬送動作の停止を防ぐ。
【解決手段】試料の搬送を行う真空搬送室において、ロボットによる前記搬送の動作中に生じるアーム上に載せられたウエハの加速度はアームの伸長の開始または収縮の終了の際の加速度が最大であって、搬送中の試料の位置ずれを検出し、そのずれ量が所定の閾値(許容値)を超えた場合に、ロボットのアームの伸長の開始または収縮の終了の際の加速度をA‘からAに低下させてずれ量が閾値を超えないようにする。
(もっと読む)
151 - 160 / 964
[ Back to top ]