
国際特許分類[B25J13/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータの制御 (2,176)
国際特許分類[B25J13/00]の下位に属する分類
手でつかむ制御装置 (68)
足で操作する制御装置 (2)
制御台,例.コンソール,スウィッチ板 (73)
センサー手段,例.視覚または触覚装置,によるもの (1,069)
国際特許分類[B25J13/00]に分類される特許
61 - 70 / 964
ロボット、状況認識方法および状況認識プログラム
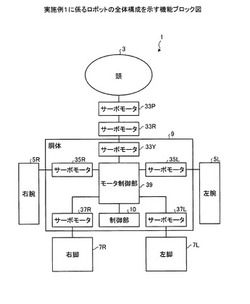
【課題】各種のセンサを用いずにロボットが保持されている保持状況を認識することを課題とする。
【解決手段】ロボット1は、ロボット1の各部位間を接続する関節に設けられた複数のサーボモータ33P、33R、33Y、35R、35L、37R及び37Lを有する。さらに、ロボット1は、各サーボモータ33P、33R、33Y、35R、35L、37R及び37Lのトルクを用いて、ロボット1の部位に対する拘束状況を検知する。
(もっと読む)
ロボット、及びロボットの制御方法

【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
電気モータ式保持制御システム及び方法
【課題】省電力で耐久性のある電動ハンドを提供すること。
【解決手段】保持装置(ハンド)に保持ストロークと解放ストロークの少なくとも一方を遂行させるための力信号を発生させるように構成された力制御モジュールを含む。保持ストロークは、保持装置の把持要素を第1位置へ移行して物体を把持することを含む。解放ストロークは、把持要素を第2位置へ移行して物体を解放することを含む。保持装置は逆駆動不可能である。ストール検出モジュールは、(i)保持装置の電気モータアセンブリのセンサから受けるセンサ信号を監視し、かつ(ii)このセンサ信号に基づいて電気モータの第1ストール状態を検出するように構成されている。シャットオフモジュールは、解放ストローク中又は解放ストロークの最後に第1ストール状態の検出に基づいて電気モータへの電流をシャットオフするように構成されている。
(もっと読む)
ロボットの制御装置
【課題】ロボットの各関節の動作状態の制御のための操作量を、擬似逆行列を用いる演算処理によって決定する場合に、その擬似逆行列を算出するために用いる適切なパラメータの値を効率よく短時間で決定する。
【解決手段】ロボット1の関節4の動作状態を制御するための操作量を決定する関節操作量決定手段22は、その演算処理に使用する擬似逆行列A*を、行列式DETの絶対値が所定の閾値以上になるように決定した調整パラメータkの値を用いて所定の式により算出する。調整パラメータkの暫定値を所定の初期値から段階的に増加させていくように設定することと、設定した各暫定値を用いてDETの値を算出することと、算出した行列式DETの絶対値が所定の閾値以上の値であるか否かを判断することとを繰り返し、該判断結果が肯定的となったときのkの暫定値を、擬似逆行列A*の算出に用いるkの値として決定する。
(もっと読む)
コミュニケーションエージェントの動作制御装置、コミュニケーションエージェントの動作制御方法、及びそのプログラム
【課題】エージェントが人に対し視線動作により情報を伝達する際に、対話時の周辺事情による視線動作への影響が考慮された自然な視線動作を実現する。
【解決手段】人と相手との対話時における、当該人の注視点の時系列集合である複数の視線動作軌道と、当該相手の所定の行動の変化とその行動の変化が生じたときの当該人の注視点の座標との組である複数の注視点情報と、を用い、人間行動認識部が、エージェントと対話しているユーザの行動を監視し、所定の行動の変化の検出時に当該行動の変化に対応する注視点情報に含まれる座標(仮想注視点)を軌道選択決定部に与え、軌道選択決定部は、1つの視線動作軌道を選択し、仮想注視点が与えられた時には行動の変化の検出時における当該視線動作軌道上の注視点を仮想注視点の方向に移動した軌道を新たな視線動作軌道とし、仮想注視点が与えられていない間は選択した視線動作軌道をそのまま用いる。
(もっと読む)
歩行補助装置
【課題】歩行動作が不自由な非健常者のリハビリに適した歩行補助装置を提供する。
【解決手段】歩行補助装置2は、ユーザの膝関節回転軸回りにトルクを発生させるモータ8と、下腿の揺動方向を検知するセンサ6、及び、モータ8を制御するコントローラ20を備える。コントローラ20は、歩行動作中の立脚に対して、ユーザの下腿が膝屈曲方向に揺動しているときには膝を伸展させる方向のアシストトルクを出力するようにモータ8を制御する。さらにコントローラ20は、立脚に対して、ユーザの下腿が膝伸展方向に揺動しているときにはアシストトルクを出力しないようにモータ8を制御する。
(もっと読む)
ロボットの均衡制御装置及びその制御方法
【課題】必要なエネルギーを効率よく使用できるロボットの歩行制御。
【解決手段】複数の関節部がそれぞれ設けられた複数の脚と、その脚に連結されたた上体を有するロボットの均衡制御方法において、上体のポーズ角度及び複数の関節部の角度を検出し、ポーズ角度及び複数の関節部の角度に基づいて現在キャプチャーポイント及び現在ヒップ高さを獲得し、現在キャプチャーポイントと予め設定された目標キャプチャーポイントとを比較してキャプチャーポイントエラーを算出し、現在ヒップ高さと予め設定された目標ヒップ高さとを比較してヒップ高さエラーを算出し、キャプチャーポイントエラーとヒップ高さエラーに基づいて補償力を算出し、その補償力に基づいて複数の関節部の少なくとも一つの自由度に対するトルクを算出し、複数の関節部に少なくとも一つの自由度に対するトルクを出力することによって、ロボットの歩行を制御する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像の画像領域を分割した分割領域ごとに、分割領域に属するワークに対する保持動作の実行をかかる分割領域に対応するロボット2a,2bに対して指示する。
(もっと読む)
ロボット制御装置、その制御方法及び制御プログラム
【課題】高速かつ安定にロボット制御の収束演算を行うこと。
【解決手段】ロボット制御装置は、ロボットの所定部の位置指令値を生成する指令値生成手段と、指令値生成手段により生成された位置指令値と所定部の制御位置との偏差を算出する第1偏差算出手段と、第1偏差算出手段により算出された偏差に基づいて、所定部に生じる力の参照値である力参照値を算出する力参照値算出手段と、力参照値算出手段により算出された力参照値と転置ヤコビ行列とに基づいて各関節トルクを算出し、算出した各関節トルクに基づいて、各関節角度を算出する関節角度算出手段と、関節角度算出手段により算出された各関節角度に基づいて、順運動学演算を行い所定部の制御位置を算出する順運動学演算手段と、を備える。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じるn自由度かつ時変の振動を、インプットシェイピング法を適用して効果的に抑制する振動抑制方法を提供する。
【解決手段】運動体に付加された第1の入力によって運動体に生じる第1の応答に、第1の応答の変位が0となる時刻において、第2の入力を運動体に付加して生じる第2の応答を重ね合わせて、互いに打ち消し合うインプットシェイピング法を適用する場合に、n自由度かつ時変の振動における複数のモード間のエネルギの移り変わりのうち、モード間の相互作用によるものを無視し、固有振動数および減衰比の変化によるものを考慮して、第1の入力に対する第2の入力の大きさを決定する。
(もっと読む)
61 - 70 / 964
[ Back to top ]