
国際特許分類[B25J9/16]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | プログラム制御 (534)
国際特許分類[B25J9/16]の下位に属する分類
電気的なもの (3)
流体的なもの
記録または再生システム (483)
国際特許分類[B25J9/16]に分類される特許
11 - 20 / 48
搬送ロボット装置
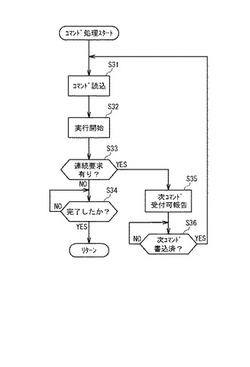
【課題】搬送全工程の所要時間を短縮することができる搬送ロボット装置を提供する。
【解決手段】制御装置と、この制御装置とのハンドシェイクにより指示されるコマンドに対応した処理を実行可能であって、現コマンドの実行中に並行して次のコマンドを読み込み、これを、現コマンドに引き続いて実行する搬送ロボットとを備えた搬送ロボット装置とする。この場合、現コマンドの実行中に並行して次のコマンドが読み込まれ、その後実行される、という過程が順次行われることにより、一度のハンドシェイクで複数コマンドを連続して実行することができる。
(もっと読む)
ロボットの制御システムおよびリアルタイムOS

【課題】プロセスごとに規定時間までに処理を一区切りさせ、二重化したシステムに対して意味のない空プロセスを実行させておくことで、安全のための二重化システムに対して診断系の処理を行うことができるリアルタイムOS装置を提供する。
【解決手段】各プロセスは、自身の内容を意味のある最小単位の実行単位に分割し、予めそれぞれに掛かる時間を算出しておく。一定時間毎の割り込みが発生するときには、空プロセス9の状態になっており、残り時間が十分なので、次の最小単位の実行に移る。さらに、この最小実行単位が終了するごとに、次の最小実行単位にかかる時間と、割り込みまでの残り時間を比較し、残り時間が十分なら、次の最小実行単位の処理へ進み、残り時間が不足しているなら、空プロセス9を実行する。
(もっと読む)
カスタマイズ可能ロボットサービスシステム及びロボットサービスの遠隔カスタマイズ方法
【課題】 店舗等で商品紹介を行うサービスロボットは予め設定されたコンテンツをスケジュールに従い商品紹介を場の状況に併せて急な変更に対応できない、あるいは、商品の販促を直接行うメーカはロボットのスケジュールと調整し、その時間対応でコンテンツを準備する必要があり、柔軟に自社の販促を行えない問題がある。
【解決手段】 ロボットに標準リソースとカスタマイズのための差し替え可能リソースを含むサービス構成リソース群で定まる手順によりサービスを行わせる構成とし、差し替え可能リソースにカスタマイズリソースを定義してロボットに設定してカスタマイズされたサービスをロボットが実行する。
(もっと読む)
ロボットの制御プログラム構築方法およびロボットシステム
【課題】 生活空間において,移動ロボットが種々の物品の把持や,会話による動作など,多様な動作を実現するためのロボット制御プログラムの作成において,プログラムの複雑化を抑制し,操作者の負担を軽減できるプログラミング環境を提供する。
【解決手段】 物品の把持シーケンスプログラムを,データベースの物品情報ごとに記憶し,ロボット10の制御プログラムの実行時に,把持対象物品の電子タグ情報を電子タグリーダ13で読み取り,その電子タグ情報をキーとしてデータベースより該物品の把持シーケンスを取得し,ロボット制御プログラムに挿入する,という手順で処理する。
(もっと読む)
ロボットの制御装置
【課題】CPUボードとゲートアレイボードとの組み合わせが様々に想定される場合でも、起動時間を極力短縮できるロボットの制御装置を提供する。
【解決手段】CPUボード31とFPGAボード35とを備える制御装置2において、CPU32は、電源が投入されると自身の初期化処理を行なった後に無限待機状態となり、FPGA36は、電源が投入された時点より開始されるコンフィギュレーションデータのロードが完了すると、CPUボード32側にレディ信号を継続的に出力する。そして、CPU32は、レディ信号が出力されたことを認識すると無限待機状態を解除して、FPGAボード35に搭載されている回路の初期化処理を開始する。
(もっと読む)
溶接検査方法、溶接検査装置、溶接検査プログラム
【課題】CADシステムによらず溶接の適否を検査可能とすることを目的とする。
【解決手段】溶接の適否を検査する溶接検査装置であって、複数の基準溶接打点に関するデータを記憶した記憶部と、複数の実溶接打点に関するデータの入力を受け付ける入力部と、記憶部に記憶された基準溶接打点に関するデータ、及び前記入力部を通じて受け付けた実溶接打点に関するデータに基づいて、前記基準側と前記ロボット側の双方の図形パターンが、類似する図形パターンとなる溶接打点の組み合わせを決定する処理を行う組合決定手段と、前記類似する図形パターンを構成する組み合わせとして決定された基準側、ロボット側双方の溶接打点に基づいて、前記基準側の打点群に対して前記ロボット側の打点群を位置合わせする処理を行う位置合わせ手段と、前記位置合わせ後、前記基準溶接打点とそれに対応する実溶接打点とを比較することで溶接の適否を検査する検査手段と、からなることを特徴とする。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】生産サイクルタイムのロスをより確実に低減できるロボットの制御装置を提供する。
【解決手段】制御装置は、所定位置に配置されたパレット56について、ロボット51のアーム54が右手系,左手系の各制御系列により動作可能となる領域を計算し、パレット56に対するワーク供給又は取出し位置Pwを基準に初期作業位置を決定すると、その初期作業位置からロボット51が順次作業を進める位置をパレット56内で決定する。そして、アーム54の現在位置Pl(n)に隣接する作業位置が同じ制御系列で作業可能であればその位置を優先して次の作業位置とし、同じ制御系列では作業不可であればそれ以外に継続して作業可能な位置があれば当該位置での作業を同じ制御系列で行い、前記位置がなければ異なる制御系列で作業可能な位置を次の作業位置とする。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】物体に衝突する際に位置制御と力制御の切り替えを円滑に行なう。
【解決手段】把持する物体の位置情報や形状情報が正確でないと、把持の失敗、把持対象物の転倒や破壊などの可能性がある。ロボット装置は、加速度制御をベースとして位置制御を行ない、指先や手先が物体に接触したときには、位置指令値を満足することよりも、大きな衝撃力を加えないことを優先する。また、指先や手先が物体などの外界と接触した直後から接触力を正確に加えることができ、把持や操作の計画が立て易い。位置制御中に物体と衝突しても所定値を超える接触力は発生せず、衝突した直後から与えられた接触力を追従する。
(もっと読む)
ロボットプログラム調整装置
【課題】試行錯誤を行うことなしに、負荷の大きい軸に掛かる負荷を軽減する。
【解決手段】複数の軸を有するロボットアームの動作プログラムを調整するロボットプログラム調整装置(11)が、ロボットアームの動作プログラムから動作命令を順次読込んでシミュレーションを実行することにより、過負荷が掛かる軸を複数の軸から特定する過負荷特定手段(12)と、過負荷特定手段により特定された軸以外の軸に対して付加的な動作を生成して、特定された軸の負荷を軽減する付加的動作生成手段(13)と、付加的動作生成手段により生成された付加的な動作に基づいてロボットアームの動作プログラムを調整するプログラム調整手段(15)とを含む。
(もっと読む)
物理量演算方法及び物理量演算装置
【課題】複数の関節を有する自動機械中の、関節の作動により移動する移動部材の速度に関する物理量を演算するための負荷を減らし、演算処理を速くすることのできる物理量演算方法及び物理量演算装置を提供する。
【解決手段】第1の行列Trot(zi−1,θi)及び第2の行列Ttrans(ai,0,di)・Trot(xi,αi)で構成される変換行列i−1Tiで、手首Xの位置0pを示した第1数式を設定した後に、当該第1数式中の変換行列i−1Tiを展開することなく微分することによって、変換行列i−1Ti及び変換行列i−1Tiを微分した行列で示される第2数式を、変換行列i−1Tiと、第1の行列Trot(zi−1,θi)を微分した微分行列と、第2の行列Ttrans(ai,0,di)・Trot(xi,αi)とによって表して物理量を演算する。
(もっと読む)
11 - 20 / 48
[ Back to top ]