
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
971 - 980 / 3,780
カーナビゲーションシステム及び画像信号出力用個別機能装置
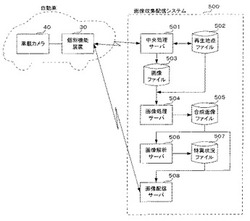
【課題】リアルタイム画像を必要とする場合にだけリアルタイム画像を配信することが可能なカーナビゲーションシステム及び画像信号出力用個別機能装置を提供する。
【解決手段】表示ディスプレイを有する中央情報表示装置と、中央情報表示装置とは別体に構成され、ナビゲーション機能を有するナビゲーション用個別機能装置と、GPS用個別機能装置と、通信機能を有する通信用個別機能装置と、画像信号出力機能を有する画像信号出力用個別機能装置と、中央情報表示装置と個別機能装置とを接続する拡張装置と、を備える車載用表示装置と、画像信号出力用個別機能装置に撮像した画像データを出力する車載カメラと、画像信号出力用個別機能装置が送信した画像データを受信して格納する受信格納手段と、画像データを変形して合成した合成画像を生成する画像処理手段と、合成画像を画像出力用個別機能装置に配信する画像配信手段と、を備える画像収集配信システムと、を備える。
(もっと読む)
走行状態検出装置及び運転支援装置

【課題】車線の減少状態を的確に検出し、車線変更方向を即時に判断することができる走行状態検出装置及び運転支援装置を提供する。
【解決手段】 運転支援装置1のECU6は、白線認識カメラ2により取得された白線画像から走行路の車線の情報を検出する車線情報検出部11と、車速センサ3及び横加速度センサ4の検出値に基づいて自車両の旋回Rを求める車両旋回状態検出部12と、車線情報検出部11及び車両旋回状態検出部12の検出結果に基づいて走行路の車線の減少状況を判定する車線状況判定部13と、車線状況判定部13の判定結果に基づいて車線変更すべき方向を判断する支援判断部14と、レーダ5の測定値に基づいて周辺車両の情報を取得する周辺車両情報取得部15と、支援判断部14及び周辺車両情報取得部15の処理結果に基づいて運転支援を制御する警報・支援制御部16とを備えている。
(もっと読む)
画像処理方法及び画像処理装置
【課題】複数のカメラからの画像データを合成して得られる車両周辺の画像を表示して、車両周辺の監視を行う画像処理装置を提供する。
【解決手段】複数のカメラが撮影した画像データを記憶可能な画像記憶部と、複数のカメラが撮影した画像データを入力し画像記憶部に記憶させるカメラ画像取得部と、車両の周囲に想定される投影面に関する3次元座標の集合である投影面形状情報を保持する投影面形状保持部を保持する投影面形状保持部と、所定の視線移動ルールに従って投影面に対する視点位置及び視線方向が連続的に遷移するように視線情報を決定する視線移動制御部と、画像記憶部に記憶された画像データを投影面に投影して合成し、合成された画像データを視線移動制御部により決定された視線情報に基づいて2次元画像データに変換する画像変換部と、画像変換部で変換された2次元画像データを表示する表示部と、画像変換部による画像変換処理を稼働させるためのトリガ信号を発生する周期描画トリガ発生部とを含む。
(もっと読む)
車外撮影画像表示システム。
【課題】 障害物の検出距離に応じて表示を変化させる車外撮影画像表示システムにおいて、画面表示のふらつきによりユーザーが受ける違和感を軽減する。
【解決手段】 超音波式の障害物検出手段1〜4の検出結果に基づいて特定される障害物までの距離が、その検出範囲21〜24内に定められた第一閾距離31,33以上の場合には表示手段7に撮影画像を表示させ、検出範囲21〜24内にて第一閾距離31,33よりも車両側に定められた第二閾距離32,34以下の場合には、表示手段7に鳥瞰画像を表示させるとともに、それら双方の閾距離31,33と32,34の間である場合には、検出される障害物までの距離が車両に近づくに従い撮影画像から鳥瞰画像に近くなるよう画面遷移させるとともに、検出される障害物までの距離が、予め定められた目隠し領域内にある場合には、表示手段7にて表示される画像の輝度を通常レベルとは異なるレベルに変更する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両の傾斜に関わらず、処理負荷の増大を抑えながら不連続部分や歪みの無い車両周辺の画像を出力することができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置1は、車両の姿勢の基準となる基準姿勢を特定する基準姿勢特定部71と、車両の周辺の画像データを取得する画像取得部72と、画像取得部72が取得した画像データの撮影が行われた際の車両の姿勢である撮影姿勢を特定する撮影姿勢特定部73と、基準姿勢特定部71が特定した基準姿勢と、撮影姿勢特定部73が特定した撮影姿勢との相違に基づき、画像取得部72が取得した画像データが利用可能か否かを判定する判定部74と、判定部74が利用可能と判定した画像データのみを用いて車両を含む領域の俯瞰画像を生成する俯瞰画像生成部75と、俯瞰画像生成部75が生成した俯瞰画像を表示するディスプレイ60とを備える。
(もっと読む)
車両周辺表示装置
【課題】視野外となった車両周辺の画像における白線等の対象物を見やすく表示できる車両周辺表示装置を提供する。
【解決手段】対象物検出手段であるマイコン1は、カメラ7で撮像された画像上の明度および色の少なくとも一方のレベルに関する画像情報のうち、画像上の明度または色が周囲とは異なるレベルである範囲を対象物として検出する。後方画像表示領域20には現在の車両後方の画像が表示される。履歴表示領域30には、上記画像情報から検出された対象物が、対応付けられた位置情報に基づく位置に描画される。
(もっと読む)
カメラ校正装置
【課題】ホモグラフィを用いたカメラ校正において、必要な数の校正指標を撮影画像の中から簡単かつ正確に求める技術を提供する。
【解決手段】第1平面Πにおける近傍領域Πsに配置された4つの近傍校正指標M1、M2、M3、M4及び遠方領域Πwに配置された少なくとも1つの遠方校正指標M5、M6と含む撮影画像を取得し、撮影画像における近傍校正指標の座標位置を算定座標位置として算定し、近傍校正指標の実座標位置と算定座標位置とから算定された予備ホモグラフィH1を用いて撮影画像における遠方校正指標の存在位置を推定する。推定された存在位置を用いて算定された遠方校正指標の算定座標位置と近傍指標の算定座標位置及びこれらに対応する実座標位置とから撮影画像面と第1平面との間の精密ホモグラフィH2を算定する。
(もっと読む)
車載装置
【課題】路側機を設置しなくても、車両乗員に対して交通信号が変化するまでの残り時間を案内可能な技術を提供すること。
【解決手段】車載装置1は、自車両前方を撮影するカメラ19を備え、このカメラ19を通じて自車両前方の映像データを取得する。一方、自車両の位置及び進行方位を特定し、この特定結果と、信号機の設置位置を表す信号機マップに基づいて、映像データに映し出される信号機の信号機IDを特定する。また、上記映像データに基づき、映像データに映し出された信号機が青信号、黄信号、及び赤信号のいずれかの交通信号の点灯を開始してから終了するまでの表示時間を算出する。そして、算出した各信号の表示時間を、対応する信号機IDと関連付けて、ハードディスク装置に登録する。この他、ハードディスク装置に登録された各信号機の表示時間の情報に基づき、自車両が次に通過する信号機の青信号残り時間及び赤信号残り時間を算出し案内する。
(もっと読む)
表示装置
【課題】直感的な表示を実現する表示装置の提供。
【解決手段】多重通信インターフェース25は、車両の車速値として取得するとともに、運転支援装置37からその作動情報を、障害物検知装置38から検知結果をそれぞれ取得する。運転支援装置37は高車速域HVAで車両の進行方向の第一領域に対して作動する装置であり、障害物検知装置38は低車速域LVAで車両の周囲且つ近接する第二領域に対して作動する装置である。プロセッサ21およびグラフィックコントローラ23は、車両を進行方向後側から俯瞰視したであって、車速値の増加に従って俯瞰視する俯角が減少する車両画像13、運転支援装置37の作動情報を報知するインジケータ16a,16b,17、障害物検知装置38の検知結果を報知する障害物検知インジケータ18を有する画像10を描画する。車両用表示装置100は、この画像10を液晶ディスプレイ29によって表示する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】記録手段に記録された画像データを合成して正確な合成画像を表示することができる、運転支援装置を提供すること。
【解決手段】運転支援装置1は、車両の周辺を撮影するカメラ40と、カメラ40が撮影した画像データを記録する画像メモリ65と、車両の移動に関する移動情報に基づき車両の移動状態を特定する移動状態特定部61と、移動状態特定部61が特定した移動状態に基づき、画像メモリ65に記録された画像データを合成し、車両を含む領域の合成画像を生成する合成画像生成部62と、合成画像生成部62が生成した合成画像を表示するディスプレイ50と、車両の旋回に対応して合成画像生成部62が生成した合成画像に含まれる基準標識の配置と、合成画像上に重畳表示される基準標識の旋回に対応する予測配置とに基づき、移動状態特定部61が旋回を移動情報に基づき特定する際に用いる旋回パラメータを校正する校正部64とを備える。
(もっと読む)
971 - 980 / 3,780
[ Back to top ]