
国際特許分類[B61B13/00]の内容
処理操作;運輸 (1,245,546) | 鉄道 (8,211) | 鉄道方式;他に分類されない設備 (1,556) | 他の鉄道方式 (957)
国際特許分類[B61B13/00]の下位に属する分類
ラック式鉄道 (38)
単軌条式 (197)
摺動または浮揚装置 (52)
トンネル式 (55)
軌条間あるいはそれに沿う推進装置をもった方式,例.空気式 (100)
国際特許分類[B61B13/00]に分類される特許
11 - 20 / 515
搬送システム
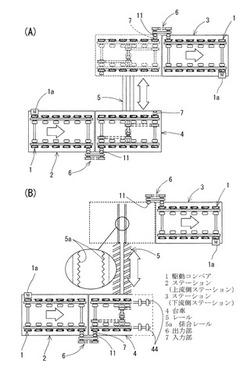
【課題】イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムを提供すること。
【解決手段】駆動コンベア1を有する複数のステーション2,3と、各ステーション前に停車する台車4と、複数のステーションを結ぶレール5とを備え、ステーションに、駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車に、出力部に着脱自在に接続される入力部7と、入力部から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、回転体はレールに係合する。
(もっと読む)
移動ロボット及び移動ロボットの制御方法

【課題】制御コストの低減を図ったうえで、所定の移動経路に沿って確実に往復移動し得る移動ロボット及び移動ロボットの制御方法を提供する。
【解決手段】移動ロボット本体2と、移動ロボット本体2を全方向に移動させると共に超信地旋回させる駆動機構4と、移動ロボット本体2の前部及び後部にそれぞれ配置されて、移動面に設定された移動経路Rを検出する前部センサ部5F及び後部センサ部5Rと、往路移動時において、前部センサ部5Fの3個のセンサ5Fl,5Fc,5Frと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせ、復路移動時において、後部センサ部5Rの3個のセンサ5Rl,5Rc,5Rrと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせる制御部10を有している。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、接続軌道を効果的に短縮し、省スペースを実現する。
【解決手段】有軌道台車システムは、第1及び第2の本軌道(101,102)、並びに接続軌道(105)を有する軌道(100)と、台車(200)とを備える。台車は、一対の第1及び第2の分岐ローラ(610)をシフト可能に支持する分岐ローラ支持部(720)と、姿勢安定ローラ(620)をシフト不能に支持する姿勢安定ローラ支持部(710)とを有している。軌道は、第1の分岐ローラを案内する第1の分岐ガイド(110a)と、第2の分岐ローラを案内する第2の分岐ガイド(110b)と、無ガイド区間で姿勢安定ローラを案内する姿勢安定ローラガイド(120b)とを有している。
(もっと読む)
搬送装置および搬送方法
【課題】製造ライン長の変更に容易に対応することが可能でありながら、製造ラインの省スペース化および設備コストの低減を図ることのできる搬送装置および搬送方法を提供する。
【解決手段】複数の台車2・2・・・を連結した搬送部8と、該搬送部8に推進力を付与する駆動源と、搬送部8から離脱させた台車2を移送するためのAGV3と、を備え、製造ライン10において、ワーク9の搬送経路Rに沿って、搬送部8を搬送方向に走行させるとともに、搬送部8の各台車2・2・・・のうち、先頭に位置する第一の台車2Pを搬送部8から離脱させて、第一の台車2Pを、AGV3によって、搬送部8の各台車2・2・・・のうち、最後尾に位置する第二の台車2Qの上流側に移送して、第一の台車2Pを第二の台車2Qの後部に連結して、製造ライン10の搬送経路R上に、搬送部8を配置し続ける搬送装置1であって、前記駆動源を、複数のAGV3・3・・・とする。
(もっと読む)
台車走行制御システム
【課題】軌道上を自走する台車の走行の安全性を高める。
【解決手段】台車1が走行する軌道2に沿って被検出体(センサ金具11a〜11d)を配置し、当該被検出体を検出するセンサ(磁気検出センサ12a〜12d)を台車1に設けた。そして、台車1の停車中にセンサにより被検出体が検出されない場合には、台車1の発車を禁止するようにした。また、台車1の走行中にセンサにより被検出体が検出されなくなった場合には、台車1を制動(減速や停止)させるようにした。
(もっと読む)
ガイドローラ
【課題】低コストでメンテナンス性に富み、案内輪と案内軌条との接触によって生じる衝撃を吸収する。
【解決手段】ガイドローラ200は、軌道150を走行する台車114側面に設けられ、台車114から延伸したアーム210と、アーム210の先端部に、円柱形状で回動可能に設けられ、円柱形状の円周部分が軌道の案内軌条152と接触する案内輪212とを備え、案内輪212は、外側が、樹脂で形成された第1弾性部材220で、内側が、樹脂で形成された第2弾性部材224で構成されており、第2弾性部材224は、第1弾性部材220よりもショア硬さが低い。
(もっと読む)
走行駆動換向装置
【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
軌道系車両の案内軌条および交通システム
【課題】必要な絶縁距離を確保するとともに、充電部を保護することで、電車線(充電部)どうしの短絡や、充電部に対する車両や他構造部材との短絡を防止することができる。
【解決手段】上方に開口し、一対の案内輪23が挿入され、走行経路の幅方向両側に、一対の案内輪23のそれぞれを転動させるための一対の案内面31bが形成された案内溝31aを有するガイドレール31と、案内溝31aに対して走行経路の幅方向外側の両側に配置され、軌道系車両の集電装置4の集電シュー43を押付けて接触給電するための電車線32と、絶縁材で形成され、電車線32をガイドレールに対して支持する第1碍子33と、電車線32の幅方向両側に設けられ、上下方向からの電車線32に対する接触による短絡防止のために、電車線32に平行、且つ集電シュー43の押付け方向に平行に設けられ、絶縁材である絶縁板34とを備えた案内軌条3Aを提供する。
(もっと読む)
分岐装置及び中央案内式の軌道系交通システム
【課題】分岐部における中央案内軌条を安定支持する。
【解決手段】分岐部を挟んで配置された中央案内軌条としての手前側本線軌条11と先側本線軌条13との間に、本線可動軌条21を配置する。本線可動軌条21は、第一端部23が先側本線軌条13に連なる位置で第一端部23を中心として揺動可能に支持されている。ロック動作機構42は、本線可動軌条21の第二端部22が手前側本線軌条11と連なる案内位置の際には、本線可動軌条21の第二端部22を係合部材41に係合させて、第二端部22を変位不能にロックする。
(もっと読む)
案内輪作用力の検出装置、これを備えている異常診断システム、軌道系車両、及び軌道系交通システム
【課題】設備コストを抑えつつも、走行路の広範囲にわたって案内輪と案内レールとの間に作用する作用力を検出する。
【解決手段】軌道系車両Vは、案内レール1に接する案内輪11と、案内輪11を転動可能に支持する支持枠21を有し、支持枠21の変位に応じて走行タイヤ14を操舵する操向機構20とを備えている。検出装置60は、支持枠21に設けられ、支持枠21の変形量を検出する検出器61と、検出器61で検出された変形量から案内輪作用力を求める作用力演算器70と、を備えている。
(もっと読む)
11 - 20 / 515
[ Back to top ]