
国際特許分類[B61B13/00]の内容
処理操作;運輸 (1,245,546) | 鉄道 (8,211) | 鉄道方式;他に分類されない設備 (1,556) | 他の鉄道方式 (957)
国際特許分類[B61B13/00]の下位に属する分類
ラック式鉄道 (38)
単軌条式 (197)
摺動または浮揚装置 (52)
トンネル式 (55)
軌条間あるいはそれに沿う推進装置をもった方式,例.空気式 (100)
国際特許分類[B61B13/00]に分類される特許
61 - 70 / 515
列車
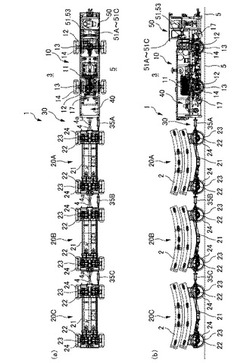
【課題】簡易で、かつ、安価に製作可能な操舵機構を有する無軌道方式用の列車を提供する。
【解決手段】列車1は、動力車10と、複数の貨車20A〜20Cと、操舵手段30と、を備える。動力車10は、軌道上を走行するための車輪13を有する一般的なディーゼル機関車11に、動力車用タイヤ14を取り付けたものである。貨車20A〜20Cは、軌道上を走行するための車輪23を有する一般的なセグメント台車21に、貨車用タイヤ24を取り付けたものである。操舵手段30は、動力車10と貨車20との間及び隣接する貨車20間に設けられた油圧ジャッキ35A〜35Cと、油圧ジャッキ35A〜35Cを作動させるための駆動装置40と、油圧ジャッキ35A〜35Cの伸縮を制御するための制御装置50と、から構成される。
(もっと読む)
搬送車システム

【課題】非接触給電方式を採用した搬送車システムにおいて、給電線とコアとの接触を減らす。
【解決手段】搬送車システムは、軌道と、給電線41と、複数の給電線ホルダ39と、搬送車と、ピックアップユニット59と、ガイド昇降機構65とを備えている。軌道は、分岐部を有する。給電線41は、軌道に沿って配置されている。給電線ホルダ39は間隔を空けて配置され、給電線ホルダ39の保持部45は鉛直方向に延びて給電線41を支持する。ピックアップユニット59は、搬送車に設けられ、給電線41に対して近接しており鉛直方向を向いた開口59aを有する。ガイド昇降機構65は、分岐部において、給電線41からピックアップユニット59を離れさせることができる。
(もっと読む)
無人搬送車
【課題】床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有する無人搬送車を提供する。
【解決手段】本無人搬送車1は、その搬送車本体1aの前方に突設され、駆動輪5に対して左右方向のいずれか一方にオフセットさせて配置される方向転換用ローラ7と、搬送車本体1aの側方に前端及び後端の2箇所突設され、壁20との接触により無人搬送車1を壁20に沿って自走させる各壁並進用ローラ10、11とを備えているので、床面の案内手段を必要とせずに簡素な構成で所定経路を自走でき、取り扱いに対して柔軟性を有するようになる。
(もっと読む)
自走搬送装置及び台車搬送方法
【課題】ストッパー付きキャスターを備える台車に連結し、ストッパーの固定を解除することなく走行可能な自走搬送装置及び台車搬送方法を提供する。
【解決手段】駆動輪11、12を備える車体13と、車体13に設けられ、ストッパー付きキャスター27、28及びストッパー無しキャスター29、30が設けられた台車24を押し上げるリフター21、22と、リフター21、22を昇降させる制御手段17とを有し、制御手段17は、センサー19を介して、台車24に設けられたマーカー32〜35からストッパー付きキャスター27、28の位置情報を取得して、リフター21がストッパー付きキャスター27、28を浮かせることができる位置まで車体13を移動させた後に、リフター21を上昇して、車体13に台車24を連結する。
(もっと読む)
台車
【課題】 例えば軽量ワークなどを搭載した台車をコンベアに同期して走行させ、また、台車を任意の場所に簡単に移動させることができるようにする。
【解決手段】 台車1の駆動輪2が取り付けられる駆動軸3に駆動スプロケット5を設け、この駆動軸3とは別個の主軸6に、大径スプロケット7を設けて駆動スプロケット5と大径スプロケット7間にチェーン8を巻き掛ける。また、主軸6に、大径スプロケット7とは別個の小スプロケット11を一体に設け、この小スプロケット11に、錘17が下降することで小スプロケット11を回転させることのできるチェーン16を巻き掛け、台車1を手押し等で後退させると、錘17が巻き上げられ、その後、錘17が自重で降下すると駆動輪2が正回転するようにする。
(もっと読む)
無人搬送車走行方法及び無人搬送車走行システム
【課題】合流点や交差点での無人搬送車の待ち合わせの発生を抑えることができる無人搬送車走行方法及び無人搬送車走行システムを提供する。
【解決手段】無人搬送車走行システム1は、複数台の無人搬送車(AGV)2と、コントローラ6と、メモリ8とを備えている。無人搬送車2は、予め決められた走行経路に沿って走行し、移載装置に荷物を搬送する。メモリ8には、無人搬送車2が走行する走行経路を複数のブロックに分割してなる走行経路ブロックデータが設定記憶されている。コントローラ6は、無人搬送車2により搬送される荷物が移載装置に到着する予定時刻を計算し、出発地ブロックから目的地ブロックまでの各ブロックにおける無人搬送車2の通過時刻を、目的地ブロックから出発地ブロックに向かって順次予約していき、無人搬送車2が走行を開始する時刻を求め、その走行開始時刻のデータを当該無人搬送車2に送信する。
(もっと読む)
シールドトンネル工事用運搬車両
【課題】 車輪ひいては車両の大型化を招くことなく、車両本体及び積載資材の荷重を受けることができ、しかも十分な制動性能が得られる鉄車輪、タイヤ車輪併用のシールドトンネル工事用運搬車両を提供する。
【解決手段】 車両本体1の左右方向中央部の前後方向に2個設けられ、単一のレールRL上を転動可能な鉄車輪3、4と、車両本体1の左右前後に4個設けられ、路面上を転動可能なタイヤ車輪5A、5B、6A、6Bと、を備える。ここで、鉄車輪3、4を駆動輪とする。また、鉄車輪3、4とタイヤ車輪5A、5Bの両方を制動輪とする。
(もっと読む)
無人搬送台車、台車及び無人搬送台車システム
【課題】従来よりも全高を低く抑えた無人搬送台車、この無人搬送台車によって牽引される台車及び無人搬送台車システムを提供する。
【解決手段】車体30の底面に設けられ、自在車輪のみで構成された複数の車輪31a、31b、31c、31dと、車体30の底面の左右両側にそれぞれ設けられ、内側を向いた窪み部45a、45bが形成された1対の被連結部材32a、32bとを有する被牽引台車11と、車体20の左右両側面からそれぞれ進出し、窪み部45a、45bに先端が入り込む1対の連結部材22a、22bを備え、被牽引台車11の底面と床面との間に潜り込んで移動する無人搬送台車10とを備える。
(もっと読む)
搬送台車システム
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
簡易交通システム
【課題】少人数の乗客輸送に関する需要がある地域・場所において、乗客の所望の行先まで、時刻の制約なく、いつでも利用することが可能な著しく高い利便性も兼ね備えた交通システムを提供する。
【解決手段】簡易交通システムであって、車両1が高架軌道2に沿って運行され、当該高架軌道2が車両1の側方において該車両と係合可能なサイドレール21を備えており、高架軌道2に沿って複数配設された乗降駅と、該高架軌道を走行する多数の単独車両1と、前記単独車両を自動運転するためのシステム運行管制手段と、を備え、上記高架軌道は、単線部と、所定の上記乗降駅の前後にて分岐・合流する複線部と、を有している。
(もっと読む)
61 - 70 / 515
[ Back to top ]