
国際特許分類[B65B5/06]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 物品または材料を包装するための機械,器具,装置または方法;荷解 (11,467) | 容器または入れ物,例.袋,大袋,箱,カートン,かん,広口瓶,での個々の物品の包装 (358) | 物品のグループの包装であって,そのグループが単一物品として取扱われるもの (131)
国際特許分類[B65B5/06]に分類される特許
71 - 80 / 131
物品移送装置
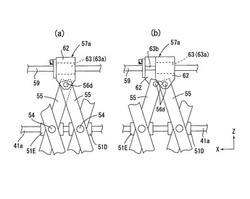
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
箸の袋入れ装置

【課題】箸袋の開口部が密着して開きにくくなっていても確実に箸袋の口を開き、かつ箸袋に皺ができたり破れたりすることなく箸を挿入する。再使用可能な通常の箸を1膳ずつ袋入れができる小型で安価な装置を提供する。
【解決手段】箸袋10の表裏両面から別々の吸引パッド5,6で吸着させ両側に引いて開口させてから箸9を挿入させる。この際、紙製箸袋は僅かながら通気性があるので、表裏の吸引パッドを正対させると吸引パッド同士が吸着して容易には離れなくなるので、表裏の吸引パッドを正対させないように位置をずらして配置する。箸供給ホッパー20下部の箸取入れ口を3膳分程度が一度に入る大きさとし、箸詰まりを可能な限り無くし、かつ箸詰まりを検出した際にはホッパーに装着したバイブレーター28を作動させて箸詰まりを解消する。
(もっと読む)
計数箱詰め装置
【課題】本発明は、ねじ、ナット、ボルト等の部品を連続的に箱詰め可能な計数箱詰め装置を提供する。
【解決手段】本発の計数箱詰め装置1は、被搬送物Sを搬送する搬送手段と、複数個の収容箱へ供給された被搬送物Sの重量を計測する計測手段と、複数の搬送経路を有し、これと同数の前記収容箱に被搬送物Sを分散供給する分散シュートと、この分散シュート7の上方に設けられ、前記搬送手段から落下した被搬送物Sを移動または停止した状態で受取り、その移動開始は前記前記計測手段の計測値に応じて決定されるように構成された可動シュート4とから構成される計数箱詰め装置1において、前記分散シュート7は、その搬送経路から排出される被搬送物Sの数量が前記可動シュート4の位置に応じて決定され、また前記可動シュート4は、前記分散シュート4における任意の数の搬送経路に対して同時に被搬送物Sを排出可能な位置で停止することを特徴とする。
(もっと読む)
集積物品のケース投入装置
【課題】 簡素な構成により、薄板状物品をスムースにケースに投入すること。
【解決手段】 集積物品のケース投入装置100であって、把持装置40により把持されて集積された複数の薄板状物品1をケース2に投入するに際し、ケース2の投入部2Cを拡開する拡開ガイド43(拡開手段)を該把持装置40に備えるもの。
(もっと読む)
箱詰機
【課題】缶詰、瓶詰等の物品を段ボール箱等の箱に詰める作業を自動化した箱詰機を提供する。
【解決手段】整列された複数の物品23を周囲から支える支持装置21と、空気の注入により膨張可能なチューブの両端をそれぞれ支持体に密嵌して取り付け、該支持体にはチューブ内へ空気を注入するための空気通路を備えさせてなるつかみ装置25とを備え、当該複数の物品を該支持装置により周囲から支えさせると共に該物品と物品との間の隙間に前記つかみ装置におけるチューブを挿入し該チューブを膨張させることにより該物品を該支持装置とつかみ装置とにより保持させた状態で、該支持装置とつかみ装置とを移動させて箱27内に該物品を詰めるようにしたことを特徴とする箱詰機。
(もっと読む)
ダンボールケーサー
【課題】内容物にかぶせた筒状のダンボールの底部の内フラップを簡単な機構で内容物の下側に折り畳むことの可能なダンボールケーサーを提供する。
【解決手段】筒状に引き起こしたダンボール1をかぶせることの可能な、内容物12を載せるための第一支持台4と、その片側に配置された第二支持台6と、反対側に昇降可能に保持された第三支持台8と、ダンボールを水平に移動させるダンボール移動手段11を設け、内容物を載せた第一支持台にかぶせたダンボール1を内容物と共に第二支持台上に移動させることで一方の内フラップ1bを内容物の下に折り込み、次いでダンボールを第三移動台に向かって移動させ、外側に折れ曲がっている他方の内フラップを上昇位置にある第三支持台の下に差し込み、次いで第三支持台を下降させてその内フラップ先端を押し下げ、その後ダンボールを第三支持台上に移動させることでその内フラップを内容物の下に折り込む構成とする。
(もっと読む)
吸着装置及び吸着装置を備えた袋詰装置
【課題】様々な重量、形状が違うビス、ナット等の複数種類の物品が入ったそれぞれ収納箱から、確実に1個の物品を吸着する吸着装置と、吸着した物品を袋詰めする袋詰装置の一連の動作を袋詰め装置本体として限られたスペース内で自動化することを課題としている。
【解決手段】吸着装置の先端部に第一磁力部材9の永久磁石と第一磁力部材の磁力を変化させる第二磁力部材11の永久磁石の機構をおいて、第一磁力部材と第二磁力部材との間隔を制御することのより吸着装置先端部の磁力が調整され、物品が多数入った箱の中から確実に1個の部品を取り出すことができる。
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法
【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
箱詰め装置
【課題】予め定めた個数の物品が正確に箱詰めされているか否かをチェックする。
【解決手段】箱詰め装置において、空の外装箱2の重量を計量部120が計量する。物品が外装箱2に詰められる前にその物品の重量を第2の計量部121が計量する。計量済み物品が詰められている外装箱2の重量を計量部122が計量する。空の外装箱2とこの外装箱2に詰められることを予定して計量された予め定めた数の計量済み物品の合計重量とが、計量済み物品が詰められている外装箱2の重量に等しいか否かをコントローラ27が判定する。
(もっと読む)
箱詰め装置及びそれを用いた箱詰め方法
【課題】複数の外装箱に同時に物品を箱詰め可能であって、かつ、吸着装置と外装箱配置装置とをより簡素に構成することができる箱詰め装置とそれを用いた箱詰め方法を提供する。
【解決手段】2以上の所定数の物品Wを並列させた物品群の状態として配置位置Pに配置する物品配置装置3と、配置位置Pの下方の箱詰め位置Uに所定数の外装箱Cを物品Wの並列方向に並行するようにして配置する外装箱配置装置80と、配置位置Pの上方において並列方向に並行して並ぶ所定数の吸着具14Fを有し、吸着具14Fは相互に並列方向に離隔可能であって、かつ全ての吸着具14Fが配置位置Pを通って昇降可能に構成されている吸着装置14と、配置位置Pの床を開放する開閉装置13と、を有する。
(もっと読む)
71 - 80 / 131
[ Back to top ]