
国際特許分類[F16B1/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 構造部材または機械部品同志の締め付けまたは固定のための装置,例.くぎ,ボルト,サークリップ,クランプ,クリップまたはくさび;継ぎ手または接続 (13,682) | 構造部材または機械部品を相互に固定または相体的に動くのを防止するための装置 (357) | 操作後に機械の要素を固定するための手段 (257)
国際特許分類[F16B1/02]の下位に属する分類
要素の作用部材の動きによる掛けはずし (20)
国際特許分類[F16B1/02]に分類される特許
41 - 50 / 237
切離機構およびこれを備えた水中切離装置
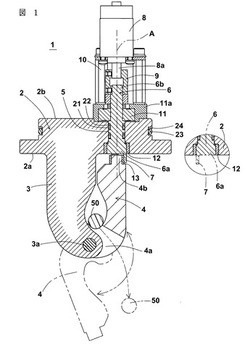
【課題】部品点数が少なく小型であるので安価であり、さらに駆動用のモータを簡便に制御することのできる切離機構およびこれを備えた水中切離装置を提供する。
【解決手段】切離機構1は、台座2の一面2a側に設けられたフック支持部材3に回転可能に一端部4aが軸支されたフック4と、台座2を貫通する孔部5に水密に嵌って回転自在なシャフト6と、台座2の他面2b側に固定されて、シャフト6に回転軸8aが連結されたモータ8とを備え、シャフト6は、その一端部6aの縁端の一部に、シャフト6の軸A方向に突出してシャフト6の回転と共にその軸Aの周りを移動するフック固定ピン7を有し、フック固定ピン7が台座2の一面2a側よりも突出して配置されており、フック固定ピン7が所定の位置でフック4の他端部4bを係止してフック4が固定され、モータ8の回転でフック固定ピン7が移動してフック4の固定が解除されるものである。
(もっと読む)
ロボットのストッパ装置

【課題】アームの360度以上の回転範囲を確保することができると共に、回転範囲内での回転において衝突音の発生の恐れがないロボットのストッパ装置を提供する。
【解決手段】ショルダ3を支持するベース2の受け座14とショルダ3の回転基部16に180度を越える角度範囲で第1の円弧状溝19と第2の円弧状溝20を形成し、両円弧状溝19,20に跨ってボール21を配置する。ボール21には予圧を与えて第1の円弧状溝19および第2の円弧状溝20の底部に押し付けることで転動時に滑りを生じないようにする。
(もっと読む)
角パイプなどのクランプ装置
【課題】 規格外のサイズの加工材が供されたとき、従来のクランプ装置にあっては、溶接ビード部を逃がすことができず、的確にクランプ固定することができないという問題があった。
【解決手段】 搬送面Aに定置した加工材Wを、その両側面に対応する左右一対の横バイスの閉塞動作と、上面に対応する立バイスD,Eの下降動作とによってクランプ固定する。上記の横バイスB,Cを、下方に配置した固定バイス片16,26と、この固定バイス片16,26に対して昇降移動できるように配設した上方の移動バイス片18,28によって構成する。
(もっと読む)
固定機構
【課題】 駆動用ネジを固定する際に生じる固定位置のずれを排除し、駆動用ネジを正確に固定することが可能な固定機構を提供すること。
【解決手段】 駆動用ネジ10に螺合する雌ネジブッシュ20と、雌ネジブッシュ20と一部が繋がって形成され、内径部と外径部とにネジ部を有する締付け部30と、締付け部30に螺合する雌ネジナット40とを備え、雌ネジナット40を回転させることにより、締付け部30が、駆動用ネジ10の進行方向と垂直な方向に変形して駆動用ネジ10を締め付けるように構成する。
(もっと読む)
物品保持具及びその製造方法
【課題】構造が簡易で、かつ、操作が簡単な物品保持具を提供する。
【解決手段】弾性連結部3は、第1基板11及び第2基板12が、弾性連結部13に対して回動させられた場合には、回動させられた第1基板11及び第2基板12を初期状態に復帰させる方向への弾発力を、第1基板11及び第2基板12に付与する。第1貫通孔113及び第2貫通孔123は、第1基板11及び第2基板12が回動状態から初期状態に戻るまでの間に、物品2の外面と干渉する。これにより、物品2を簡易な動作で保持することができる。
(もっと読む)
保持装置
【課題】安定的に対象物を保持しつつ対象物を簡単に着脱することができる保持装置を提供する。
【解決手段】対象物31の保持にあたって、円錐台27の表面は対象物31を受け止める。可動部材24は傾斜姿勢で受け入れ孔18内に保持される。3点接触が実現される。その結果、対象物31は固定部材14および可動部材24の間に簡単に安定的に保持される。しかも、可動ピン24から対象物31に大きな力は作用しない。対象物31の変形や破損は回避される。加えて、対象物31の取り付けにあたって、対象物31は基準面13に沿って固定部材14に向かって変位すれば足りる。同時に、対象物31の取り外しにあたって、対象物31は垂直方向に上方に持ち上げられれば足りる。こうして保持装置11に対して対象物31は簡単に着脱される。
(もっと読む)
ブラケット取付装置
【課題】簡易な構造でブラケットを確実に固定することを可能にするとともに、作業効率や安全性を向上すること。
【解決手段】本発明では、機器本体の両側面には横溝と、この溝に非平行な縦溝とを形成し、ブラケットには、内側に凸出して横溝に挿通し得るレール状の凸条と、縦溝に挿入されて係合された係合状態と縦溝から引き抜かれた係合解除状態とに移動可能な縦溝係合部材とを設け、機器本体をブラケットに固定するときには、ブラケットの凸条を機器本体の横溝に挿通した後、ブラケットの縦溝係合部材を、機器本体の縦溝に挿入して係合状態とし、機器本体をブラケットから取り外すときには、ブラケットの縦溝係合部材を、機器本体の縦溝から引き抜いて係合解除状態とした後、ブラケットの凸条から機器本体の横溝を引き抜いて取り外すように構成した。
(もっと読む)
カップリング装置
【課題】 軸方向に並ぶ2つの部材の歯の噛み合い部に切粉等の異物が侵入するのを防いで、両部材の円周方向位置および軸方向位置を正確に位置決めすることができるカップリング装置を提供する。
【解決手段】 軸方向に並んで対向し相対的に軸方向に移動させて互いに連結および分離させる第1部材21および第2部材22を備える。これら両部材21,22の対向面に、互いに噛み合って両部材21,22の円周方向の位置決めをする歯31,32の列を同心の円周上にそれぞれ設ける。また、両部材21,22の対向面に、両部材21,22が歯31,32の列の噛み合いにより連結された状態において互いに軸方向に向き合う当接面33a,34aで当接して両部材21,22の軸方向の位置決めをする当接部33,34をそれぞれ設ける。当接部33,34は、歯31,32の列の外周側に全周にわたって設ける。
(もっと読む)
可動体の駆動装置およびその駆動方法
【課題】形状記憶ポリマーを用いることにより、アクチュエータにエネルギーを供給することなく可動体の位置保持を可能とする可動体の駆動装置およびその駆動方法を提供する。
【解決手段】位置保持装置40,50は、筒状ポリマー110と、係合部142とを備える。筒状ポリマー110は、ガラス転移温度以上においてゴム状態となると共にガラス転移温度未満においてガラス状態となる形状記憶ポリマーにより筒状に形成され、基体10および可動体20の少なくとも一方に連結されている。係合部142は、基体10および可動体20の他方に対して固定的に設けられ、筒状ポリマー110の外周側に設けられ、ゴム状態において筒状ポリマー110の筒径が増大するように筒状ポリマー110が膨張変形した後に膨張変形した前記筒状ポリマーが前記ガラス状態となることで筒状ポリマー110に係合する。
(もっと読む)
姿勢制御装置
【課題】検出器の姿勢を制御する姿勢制御装置の小型化を図る。
【解決手段】姿勢制御装置100において、制御部(第1軸制御手段)6は、第1クランプ機構4による保持部材2のY軸周りの回動の規制を解除することで、重錘3の重力作用により保持部材2をY軸周りに回動させるとともに、所定時間経過後に第1クランプ機構4による保持部材2の規制を行う。また、制御部(第1軸制御手段)6による制御後に、制御部(第2軸制御手段)6は、第2クランプ機構5による保持部材2のX軸周りの揺動の規制を解除することで、保持部材2をX軸周りに揺動させるとともに、所定時間経過後に、第2クランプ機構5による保持部材2の規制を行う。
(もっと読む)
41 - 50 / 237
[ Back to top ]