
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
91 - 100 / 218
電動式直動アクチュエータおよび電動式ブレーキ装置
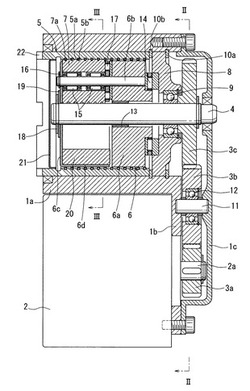
【課題】直線運動する出力部材に横向きのモーメントが作用しても、出力部材の直線運動をスムーズに案内できるようにすることである。
【解決手段】遊星ローラ7を支持するキャリヤ6の軸方向への移動を規制して、ハウジング1の円筒部1aの内径面に軸方向へスライド可能に内嵌された外輪部材5を、連結される被駆動物にキー22で回り止めし、外輪部材5を直線運動する出力部材とすることにより、出力部材としての外輪部材5を円筒部1aの内径面で軸方向に長い寸法で案内可能とし、直線運動する外輪部材5に横向きのモーメントが作用しても、外輪部材5の直線運動をスムーズに案内できるようにした。
(もっと読む)
生体模倣機械継ぎ手

生体模倣ロボット装置の支持部材の間に可変トルクを発生させるための生体模倣機械継ぎ手であって、ベース支持部材、ベース支持部材と回転可能に結合している回転支持部材、およびベース支持部材と回転支持部材との間に動作可能に結合している半径可変プーリを備える。半径可変プーリは、半径が可変であり外周表面に形成される1つまたは複数の腱溝を備える滑車本体を具備する。機械継ぎ手は、1つまたは複数の柔軟な腱と拮抗アクチュエータ対をさらに備え、それぞれのアクチュエータ対は1つまたは複数の腱と結合し、半径可変プーリの周りの腱をいずれの方向にも動作できるように構成され、ベース支持部材と回転支持部材との間に可変トルクを生成する。 (もっと読む)
電動式直動アクチュエータおよび電動式ブレーキ装置
【課題】各遊星ローラを負隙間によって予圧することなく、回転軸の回転トルクを各遊星ローラに安定して伝達でき、かつ、回転軸の軸受にモーメント荷重が作用しないようにすることである。
【解決手段】キャリヤ6の各支持ピン6bに回転自在に支持された各遊星ローラ7を、各支持ピン6bを包絡するように巻回された縮径リングばね17によって半径方向内方へ付勢し、各遊星ローラ7を回転軸4の外径面に押圧付勢するとともに、各遊星ローラ7と外輪部材5との間に、微小な径方向変位で接触して回転軸4を間接的に支持する接触支持部を設けることにより、各遊星ローラ7を負隙間によって予圧することなく、回転軸4の回転トルクを各遊星ローラ7に安定して伝達でき、かつ、回転軸4の玉軸受9にモーメント荷重が作用しないようにした。
(もっと読む)
電動式直動アクチュエータおよび電動式ブレーキ装置
【課題】各遊星ローラを負隙間によって予圧することなく、回転軸の回転トルクを各遊星ローラに安定して伝達でき、かつ、回転軸の軸受にモーメント荷重が作用しないようにすることである。
【解決手段】キャリヤ6の各支持ピン6bに回転自在に支持された各遊星ローラ7を、各支持ピン6bを包絡するように巻回された縮径リングばね17によって半径方向内方へ付勢し、各遊星ローラ7を回転軸4の外径面に押圧付勢するとともに、回転軸4と外輪部材5との間に介在し、微小な径方向変位で外輪部材5の内径面と接触する円環部を有するキャリヤ本体6aによって、回転軸4を間接的に支持することにより、各遊星ローラ7を負隙間によって予圧することなく、回転軸4の回転トルクを各遊星ローラ7に安定して伝達でき、かつ、回転軸4の玉軸受9にモーメント荷重が作用しないようにした。
(もっと読む)
電動式直動アクチュエータおよび電動式ブレーキ装置
【課題】螺旋凸条を回転軸または外輪部材と一体に形成したもので、安価な加工コストで遊星ローラに径方向の予圧を付与できるようにすることである。
【解決手段】外輪部材5の内径面に形成した螺旋凸条5aの凸先端面を、遊星ローラ7の外径面に設けた螺旋溝7aの溝底面に接触させて、遊星ローラ7に径方向の予圧を付与することにより、安価な加工コストで遊星ローラ7に径方向の予圧を付与できるようにした。
(もっと読む)
車両用自動開閉装置
【課題】索条体の開閉体への接続作業を容易にするとともに当該車両用自動開閉装置の車両への搭載性を向上させることである。
【解決手段】ケース25のカバー36にテンションカバー爪61を設けるとともにプーリホルダ42を移動自在に支持するガイド軸41にストッパ46を回動自在に装着する。ケーブルをスライドドアに接続する際には、ストッパ46を開放位置としてプーリホルダ42をテンションカバー爪61に係合させることによりスプリング47を圧縮状態に仮保持する。スプリング47の仮保持を解除する際には、ストッパ46を規制位置にまで回動させることにより、テンションカバー爪61を解除方向に駆動してプーリホルダ42との係合を解除する。また、スプリング47の仮保持が解除されたときには、ストッパ46によりプーリホルダ42の移動ストロークを規制して、スプリング47の圧縮変位量を所定範囲に規制する。
(もっと読む)
摩擦駆動装置
【課題】 オイルレスで高いトラクション性能と高耐久性を得ることができるようにする。
【解決手段】 駆動ローラ3と、その外周面を所要の予圧力を付した状態で接触させるスライドバー2とを備えて、駆動ローラ3の回転駆動によりスライドバー2を相対移動できるようにしてある摩擦駆動装置にて、駆動ローラ3の外周面と、スライドバー2における駆動ローラ接触面の双方に、クロムナイトライド層18,19を設ける。回転駆動する駆動ローラ3の外周面とスライドバー2との接触部にて、クロムナイトライド層18,19を介した両者の接触面圧を高く設定することで高いトラクション性能を得ると共に、クロムナイトライド層18,19同士の転がりすべりを行わせることで、駆動ローラ3及びスライドバー2の摩耗量を共に低減させる。
(もっと読む)
ロボットアーム
【課題】小型の回転関節を備えていても高加速トルクを供給することができること。
【解決手段】駆動側リンク4cと従動側リンク4dとが従動側リンクを駆動側リンクに対して回転駆動させるトルクを供給する回転関節5cを介して連結されたリンク機構を有する装置であって、駆動側リンクに、回転関節の前記トルクのうちの加速トルクを補助するための加速補助トルクを供給する加速補助トルク供給機構7を備えることを特徴とするロボットアームを提供する。
(もっと読む)
プーリ装置
【課題】成形型の構造を複雑化させることなく連結具のプーリケースへの装着自由度を向上させることができるプーリ装置の提供。
【解決手段】プーリケース40に、プーリケース40からのケーブルの出入りを案内する連結具28がプーリ軸50の軸方向から差し込まれる連結具装着部46aを設け、ケースカバー80に、連結具装着部46aの開口側を覆う被覆部82bを設けた。支持孔43bを成形するスライド型により同時に連結具装着部46aを成形できる。スライド型を増やすことなく、スライド型には連結具装着部46aを成形する装着部成形突起を追加するだけで済み、各成形型の構造の複雑化を抑制できる。連結具装着部46aを成形する装着部成形突起の傾斜角度等を任意に設定することで、連結具28のプーリケース40への装着自由度が向上する。
(もっと読む)
ねじれ紐アクチュエータとそれを用いた義肢用アクチュエータユニット
【課題】ねじれ紐アクチュエータのスライド部材と駆動対象物を接続するワイヤの緩みを防止し張り具合を一定にする作業を短時間で行うことを可能にする。
【解決手段】ねじれ紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32と、その先端側と駆動対象物との間に接続されるワイヤ5とを備えている。駆動機構部20の作動に伴いねじれ紐1の長さが変化してスライド部材32がねじれ紐1の長手方向に変位し、その変位がワイヤ5を介して駆動対象物に伝達される。スライド部材32とワイヤ5との接続部に、ワイヤ5の張り具合を調整する調整手段7が設けられている。
(もっと読む)
91 - 100 / 218
[ Back to top ]