
国際特許分類[F16H61/66]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置の制御機能 (12,590) | 無段変速伝動装置に特に適したもの (1,533)
国際特許分類[F16H61/66]の下位に属する分類
無端可撓部材を有するもの (963)
摩擦伝動装置 (222)
国際特許分類[F16H61/66]に分類される特許
41 - 50 / 348
車両制御装置
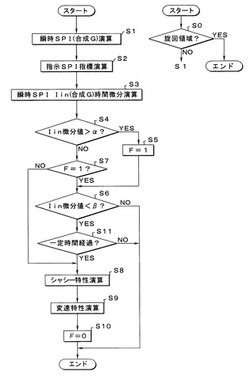
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
無段変速機

【課題】マニュアルモードにおける変速が運転者に違和感を与えることがない無段変速機を提供する。
【解決手段】バリエータ(20)と副変速機構(30)とが接続された無段変速機において、マニュアルモードが選択されているときに、運転者からの変速指示に対応する変速比が、第1の変速比と第2の変速比との間である場合に、バリエータ(20)の変速比のみを変更してスルー変速比を目標変速比へと到達させた後に、スルー変速比が変化しないようにバリエータ(20)の変速比を副変速機構(30)の変速比の変化に対応して変化させながら副変速機構(30)の変速を行う。
(もっと読む)
電動オイルポンプの制御装置
【課題】走行用駆動源で駆動される機械式オイルポンプを補助する電動オイルポンプの異常を適確に診断しつつ適切なフェールセーフ処置が施されるようにする。
【解決手段】電動オイルポンプ駆動用モータの回転が安定した状態で、モータ電流が下限閾値未満で所定時間を経過したときは、ポンプ機能故障(低電流)と判定し、電動オイルポンプの駆動を継続しつつ機械式オイルポンプの吐出量を増大し、モータ電流が上限閾値を超えて所定時間を経過したときは、電動オイルポンプの駆動を停止し、機械式オイルポンプの吐出量を増大してポンプ機能故障(高電流)と判定する。
(もっと読む)
内燃機関の制御装置
【課題】燃焼モードのHCCI燃焼モードからSI燃焼モードへの切換を、内燃機関の動力の変動を抑制しながら適切に行うことができる内燃機関の制御装置を提供する。
【解決手段】この内燃機関3の制御装置1では、SI燃焼モード切換条件が成立したと判定されたときに、SI燃焼モードへの切換に伴うスロットル弁13よりも下流側の吸気通路9内の圧力PBの変化が抑制されるように、変速機6の変速比RTRMを減少側の所定の変速比RTRMCMDに制御する変速比減少制御を実行するとともに、スロットル弁13の開度を減少側に制御するスロットル弁開度減少制御を実行する。
(もっと読む)
作業車両
【課題】ゼロ発進または微速走行性能を向上できると共に、負荷の大きい高速移動作業においても、作業能率を簡単に向上できるようにした作業車両を提供する。
【解決手段】エンジン5を搭載した走行機体2と、前記エンジン5からの動力を変速する油圧ポンプ500及び油圧モータ501付きの油圧式無段変速機29と、前記エンジン5からの動力と前記油圧モータ501からの出力とを組み合わせた前記油圧式無段変速機29の変速出力が一方向の回転力として伝達される主変速出力軸36と、前記主変速出力軸36からの一方向の回転力を正転出力又は逆転出力に切り換える前後進切換機構41,43とを備える。前記油圧モータ501からの出力が逆転方向の出力制御状態で前記エンジン5からの正転回転数と前記油圧モータ501からの逆転回転数とが一致する場合に、前記走行機体2の移動速度が零になるように構成する。
(もっと読む)
農用作業車両
【課題】
トラニオンアームを操作する走行変速レバーに変速時の負荷がかかりにくい構成として作業者の労力軽減を図ると共に、補助モータからの駆動力でトラニオンアームを操作することにより、機体の発進や停止がスムースに行える構成とする。
【解決手段】
トラニオンアーム24を駆動力で移動させる補助モータ33を設け、補助モータ33の回転を伝動する補助伝動軸34を設け、変速操作レバー22の傾斜角度を検出する角度センサ25を設け、角度センサ25からの信号を受けて補助モータ33の回転数を変更制御する制御装置39を設け、走行停止ペダル29の操作に連動して補助伝動軸34の回転を規制する回転規制手段37を設け、走行停止ペダル29の操作に連動してトラニオンアーム24を中立位置に移動させる連動部材38を設けて構成する。
(もっと読む)
無段変速機の変速制御装置
【課題】クルーズ制御中の過渡時における無段変速機の変速ハンチングを抑制する。
【解決手段】クルコン要求馬力演算部33はクルーズ目標車速Soと実車速Sとの速度差ΔSからクルコン要求馬力HPsを求め、クルコン要求トルク演算部34はクルコン要求馬力HPsとエンジン回転数Neとに基づいてクルコン要求トルクTcsを求める。クルコン用アクセル開度演算部37はクルコン要求トルクTcsとエンジン回転数Neとに基づきクルコン用アクセル開度θhaの特性曲線が等馬力曲線に沿って設定されているエンジントルクマップを参照して、クルコン用アクセル開度θhaを設定する。目標プライマリ回転数演算部25はクルコン用アクセル開度θhaと実車速Sとに基づき変速線マップを参照して目標プライマリ回転数Npoを設定する。変速制御部26は目標プライマリ回転数Npoと実車速Sとに基づき目標変速比を求めて変速制御を行う。
(もっと読む)
無段変速装置
【課題】運転者が変速比を選択する手動変速モードを実現する機能を有する構造で、無段変速装置の変速比を、運転者が選択した変速比に迅速に変更可能で、しかも優れた信頼性及び耐久性を確保できる構造を実現する。
【解決手段】手動変速機能に基づいて選択された目標変速比と現在の変速比である現状変速比との間に、低速モードと高速モードとの切換ポイントが存在する場合に、前記目標変速比が選択された事を検知した後、直ちに低速用クラッチと高速用クラッチとの断接制御を開始する。
(もっと読む)
無段変速装置
【課題】手動変速モードを選択した状態での走行時にも、危険回避等の為に必要な加速力を得られる構造を実現する。
【解決手段】予め設定された互いに異なる変速比である複数段の値の何れかに、運転者の操作に基づいて調節する手動変速機能と、同じく変速比を、運転者の操作に基づかずに、その時点での運転状態に応じて自動的に調節する自動変速機能とを備える。運転者の変速操作に基づき前記複数段のうちの何れかの変速段が選択され、且つ、当該変速段に対応する変速比に調節されている状態で、アクセルペダルの踏み込み量が急増した場合に、運転者が前記手動変速機能に基づいて前記変速比を減速側に変更しない場合でも、その時点での車速と前記アクセルペダルの踏み込み量とに応じて最適と判断される変速比に自動的に調節する機能を有する。
(もっと読む)
無段変速装置
【課題】トラクション部に滑りが発生した場合に、この滑りの発生を、この滑りが過大になる前の初期段階で検知でき、更に、適切な制御を施す事ができる構造を実現する。
【解決手段】動力算出手段32が算出する動力と、動力伝達機構26部分(トルクコンバータ28、遊星歯車式変速機29)の伝達効率とに基づいて、補助動力算出手段35により算出されるエンジントルクと、この補助動力算出手段35とは別に設けた動力推定手段34により算出されるエンジントルクとを、動力差算出手段35により比較する。この動力差算出手段35が算出した偏差が、予め設定した閾値を超えた場合には、トラクション部で有害な滑りが発生している可能性があると判断して、滑り回避制御手段37により制御を行う。
(もっと読む)
41 - 50 / 348
[ Back to top ]